(54) РУКА МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1983 |
|
SU1121132A2 |
| Рука манипулятора | 1978 |
|
SU697315A1 |
| Рука манипулятора | 1986 |
|
SU1364462A2 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2374064C1 |
| Промышленный робот | 1980 |
|
SU931462A1 |
| АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА | 1991 |
|
RU2021099C1 |
| Манипулятор | 1987 |
|
SU1444140A1 |
| Рука манипулятора | 1984 |
|
SU1332690A1 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЛЕГЧЕ ВОЗДУХА (ВАРИАНТЫ) | 2006 |
|
RU2318697C2 |
| КОСМИЧЕСКИЙ ПОСАДОЧНЫЙ АППАРАТ | 2014 |
|
RU2584552C1 |
Изобретение относится к робототехнике, более конкретно - к манипуляторам.
По основному авт.св. № 697315 известна рука манипулятора, содержащая последовательно соединенные звенья, приводы и схват, причем звенья вьтолнены в виде телескопических цилиндров, соединенных между собой посредством тороидальных эластичных баллонов 1.
Недостатком известной руки манипулятора является низкая грузоподъемность, вследствие незначительной жесткости всей конструкции, а также невозможность получить достаточную точность позиционирования и качество переходных процессов при управлении движением манипулятора.
Цель изобретения- расширение технологических возможностей и улучшение качества переходных .процессов при управлении движением манипулятора .
Указанная цель достигается тем, что рука снабжена электромагнитными устройствами, расположенными на внешней поверхности цилиндров, а тороидальные эластичные баллоны заполнены ферромагнитным наполнителем.
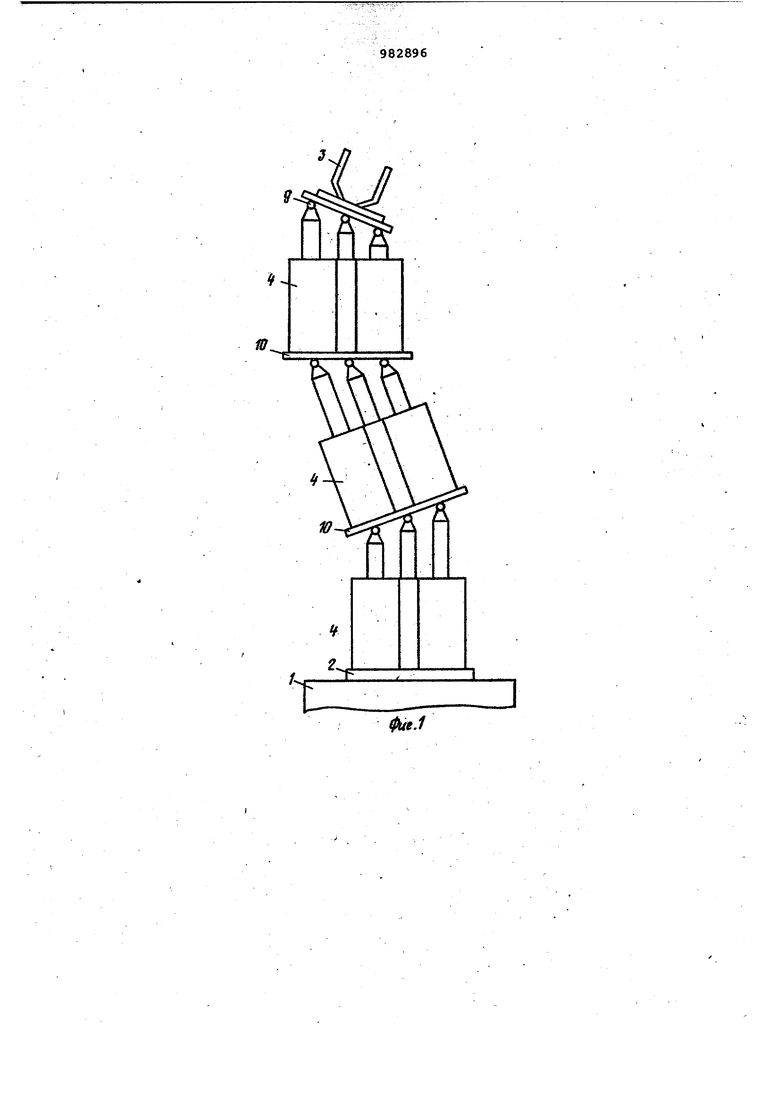
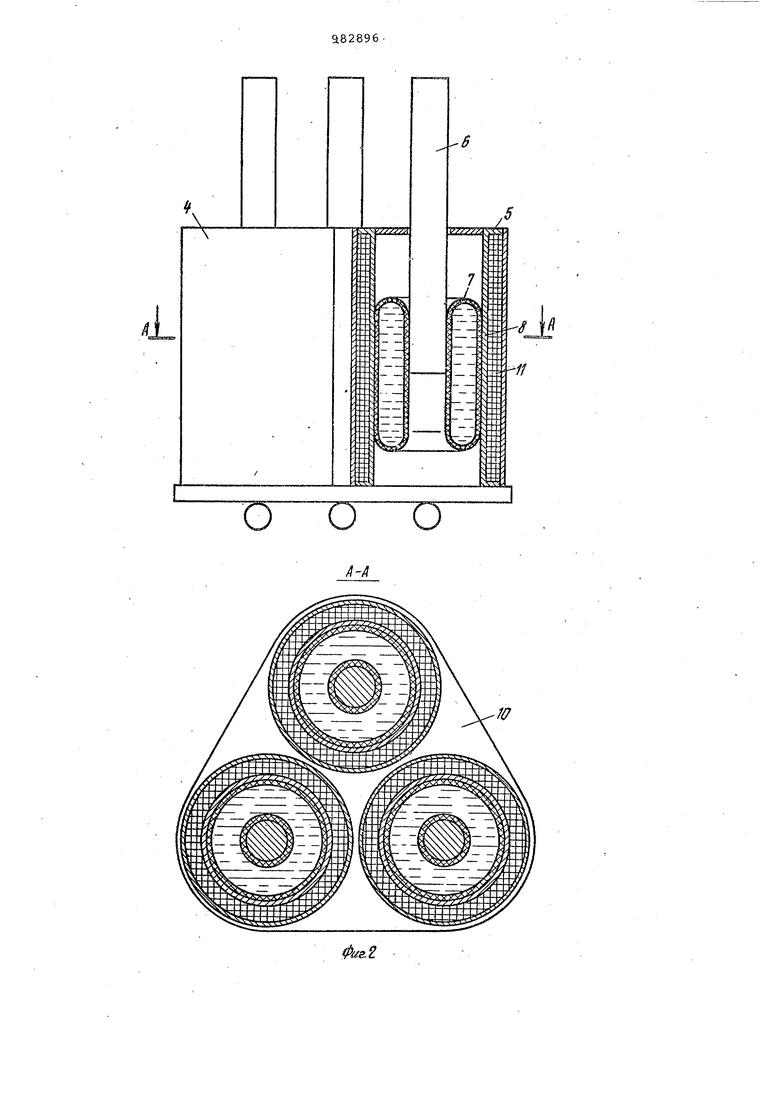
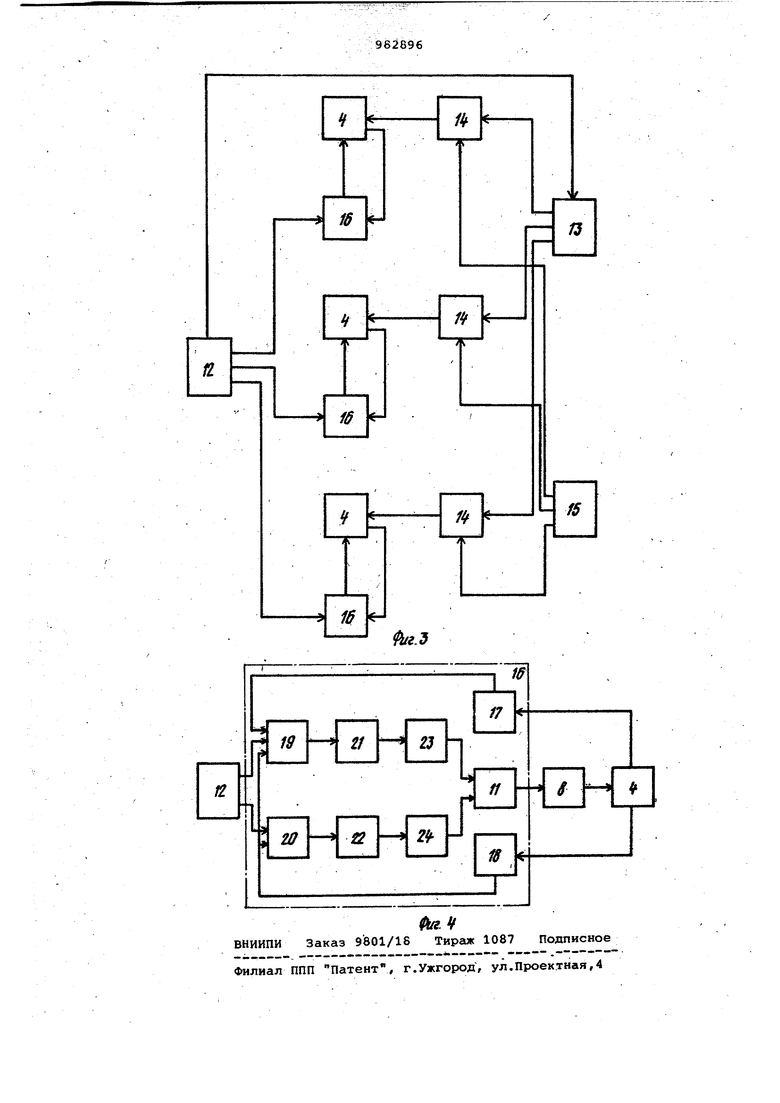
На фиг. 1 изображена рука манипулятора, общий вид; на фиг. 2 - вид одного звена руки манипулятора; на
5 фиг. 3 - структурная схема системы управления манипулятором; на фиг. 4 схема системы управления одним пневмоцилиндром.
К корпусу 1 (фиг. 1) крепится
10 основание 2 первого збена руки манипулятора. К последнему звену руки манипулятора крепится захват 3. Пневмоцилиндры 4 (фиг. 2) состоят из внешнего цилиндра 5 и штока 6, соединенных между собой с помощью тороидальных эластичных баллонов 7. Баллоны заполнены ферромагнитным наполнителем 8, плотно прилегают к внешним по отношению к ним цилиндрам 5 и плотно охватывают шток 6,
20 чем обеспечивается герметичность внутренней полости пневмоцилиндра. Для предотвращения выталкивания баллонов 7 из внешнего цилиндра 5 и штока 6 из баллонов 7, а также
для улучшения герметичности, баллоны прикрепляют по кольцу к внешнему цилиндру 5 и штоку 6, например, приклеивая их. Концы штоков 6 прикреплены к шарнирам 9 (фиг. 1), расположенным на основании 10 следующего звена. При подаче силового давле ния во внутреннюю полость пневмоцилиндра 4 тороидальные баллоны 7 начинают перекатываться, выдвигая штоки б. Обратный ход осуществляетс за счет вакуумирования (шланги сило вого и низкого давления не показаны Скорость перекатывания баллонов 7 зависит от вязкости ферромагнитного наполнителя 8, которая регулируется системой управления путем изменения напряженности магнитного поля катуш ки 11 индуктивности, расположенной на внешнем цилиндре 5. Система управления рукой манипулятора (фиг. 3) состоит из устройства 12, задающего движения руки (например, программное устройство, рукоятка управления и т.п.), через блок усилителей-преобразователей 13 управляющего электропневмоклапан ми ( ЭПК ) 14, посредством которых пнезмоцилиндры 4 связаны с пневмосистемой 15, Управление движением каждого пневмоцилиндра 4 осуществля ется блоком 16,. включающим в себя датчики 17 и 18 положения штока и его скорости (не показаны), блок 19логики, элемент 20 сравйения, релейный усилитель 21, формировател 22 сигнала и усилители-преобразователи 23 и 24. Рука манипулятора работает еле- . дукхцим образом. Пусть необходимо переместить пре мет из одной точки пространства в другую с определенной скоростью. Сигналы с задающего блока устройств 12через усилители-преобразователи 13поступают на ЭПК 14,-и в пневмоцилиндры 4 подаетсй силовое давлени Эластичные баллоны 7 начинают пе рекатываться, выдвигал штоки б. Программные значения скорости и коо динаты выдвижения с задающего блока устройства 12 поступают на элемент 20сравнения и блок 19 логики соответственно. Регулирование скорости выдвижения штока б осуществляется следящим контуром, состоящим из дат чика 18 скорости, формирователи 22 сигналов и усилителя-преобразовател 24. В зависимости от сигнала с элемента 20 сравнения изменяется напряженность магнитного поля катуш ки и, следовательно, вязкость ферромагнитного наполнителя 8, от кото рой зависит скорость выдвижения штока 6. В блоке 19 логики на основании программного сигнала и информации с датчиков определяется момент остановки штока б, а на катушку 11 через релейный усилитель 21 и усилитель-преобразователь 23 подается сигнал определенной величины, необходимой для затвердения ферромагнитного наполнители 8. Таким, образом, происходит выдвижение штоков б пневмодилиндров 4 на требуемую величину с определенной скоростью, вследствие чего основание 10 разворачивается и занимает кужное положение, причем разворот осуществляется с заданной скоростью, определяемой скоростями выдвижения штоков б., после окончания разворота звено преобретает необходимую жесткость за счет затвердевшего в баллонах 7 ферромагнитного наполнителя 8. В результате разворота основания 10 рука манипулятора занимает необходимое положение и захват 3 берет деталь. Перемещение детали происходит аналогичным образом, причем звенья, не участвующие в изменении конфигурации руки манипулятора, остаются затвердевшими, что увеличивает жесткость всей . Применение предложенного устройства позволит упростить управление манипулятором, улучшить качество переходных процессов при управлении движением.последнего и повысить точность позиционирования. Формула изобретения Рука манипулятора по авт.св. №697315, отличающаяся тем, что, с целью расширения технологических возможностей и улучшения качества переходных процессов при управлении движением манипулятора, она снабжена электромагнитными устройствами, расположенными на внешней поверхности цилиндров, а тороидальные эл.астичные баллоны заполнены ферромагнитным наполнителем. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 697315, кл. В 25 J 3/00, 1978,
фиг.2
/
