СО СГ5 СП
Изобретение относится к автоматизации процессов измельчения сырья в барабанных мельницах при обогащении полезных ископаемых, в промышленности строительных материалов, химической промышленности и тепловой энергетике.
Цель изобретения повышение точности управления.
щения барабана. Слева и справа от источника размещают приемники 3 и 4 отраженного излучения с учетом допустимых реальных отклонений траектории от заданного оптимума.
Для осуществления способа может быть использован радиоизотопный измеритель заполнения мельниц (РИЗМ).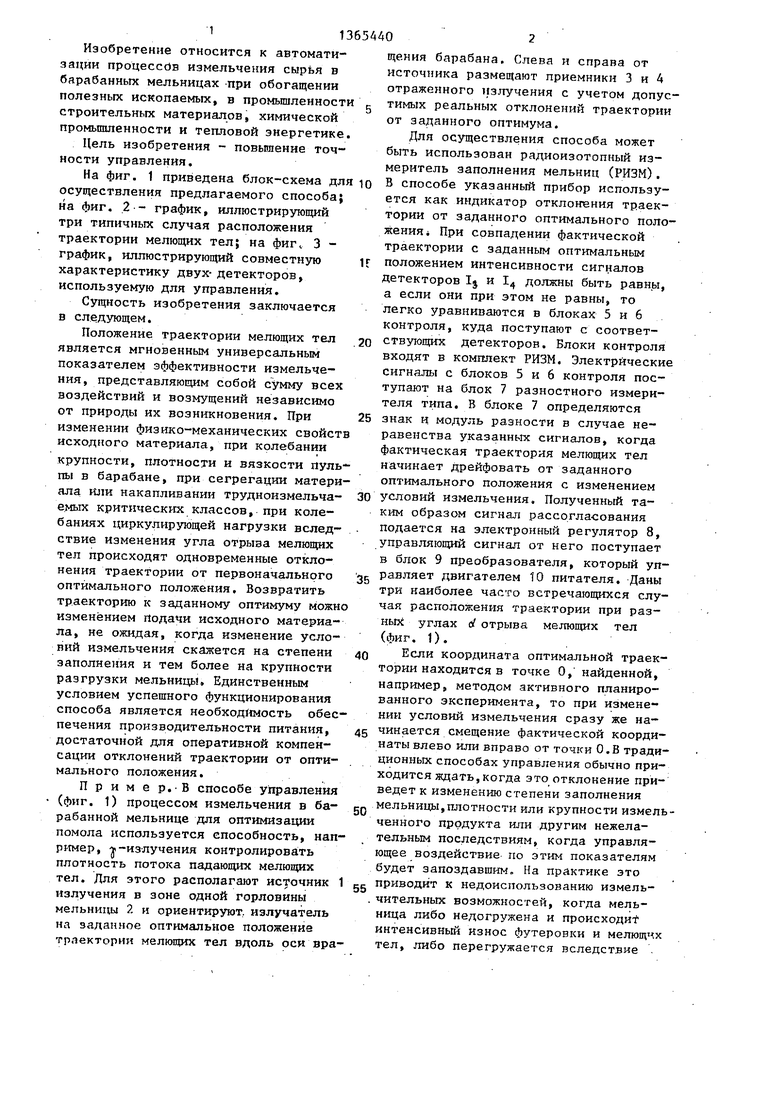

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления процессом измельчения в барабанной мельнице | 1982 |
|
SU1109194A1 |
| Способ управления процессом измельчения в барабанной мельнице | 1985 |
|
SU1247084A1 |
| Способ управления процессом измельчения в барабанной мельнице | 1982 |
|
SU1014588A1 |
| Способ управления процессом измельчения в барабанной мельнице | 1979 |
|
SU910193A1 |
| Способ управления процессом помола в мельнице | 1984 |
|
SU1186256A1 |
| Способ управления измельчением твердых материалов | 1988 |
|
SU1604480A1 |
| Способ автоматического управления заполнением мельниц сливного типа | 1982 |
|
SU1034780A1 |
| Способ управления технологией самоизмельчения руд в промышленных барабанных мельницах | 1986 |
|
SU1447405A1 |
| Способ оптимального управления работой мельницы самоизмельчения | 1977 |
|
SU740281A1 |
| Способ управления процессом измельчения в барабанной мельнице | 1985 |
|
SU1357073A1 |
Изобретение относится к автоматизации процессов измельчения сьфья в барабанных мельницах при обогащении полезных ископаемых в про тшенности строительньтх материалов, химической промьшшенности и тепловой энергетике, позволяет повысить точность управления. Для достижения этой цели подают излучение на внутримельнич- ную среду, измеряют интенсивности отраженного излучения и изменяют производительность по исходному питанию, измеряют направление и величину отклонения фактической траектории мелющих тел от оптимального положения, причем изменение производительности питания по исходному продукту осуществляют в зависимости от напр авле- ния и величины отклонения фактической траектории мелющих .тел от оптимального положения. 3 ил. 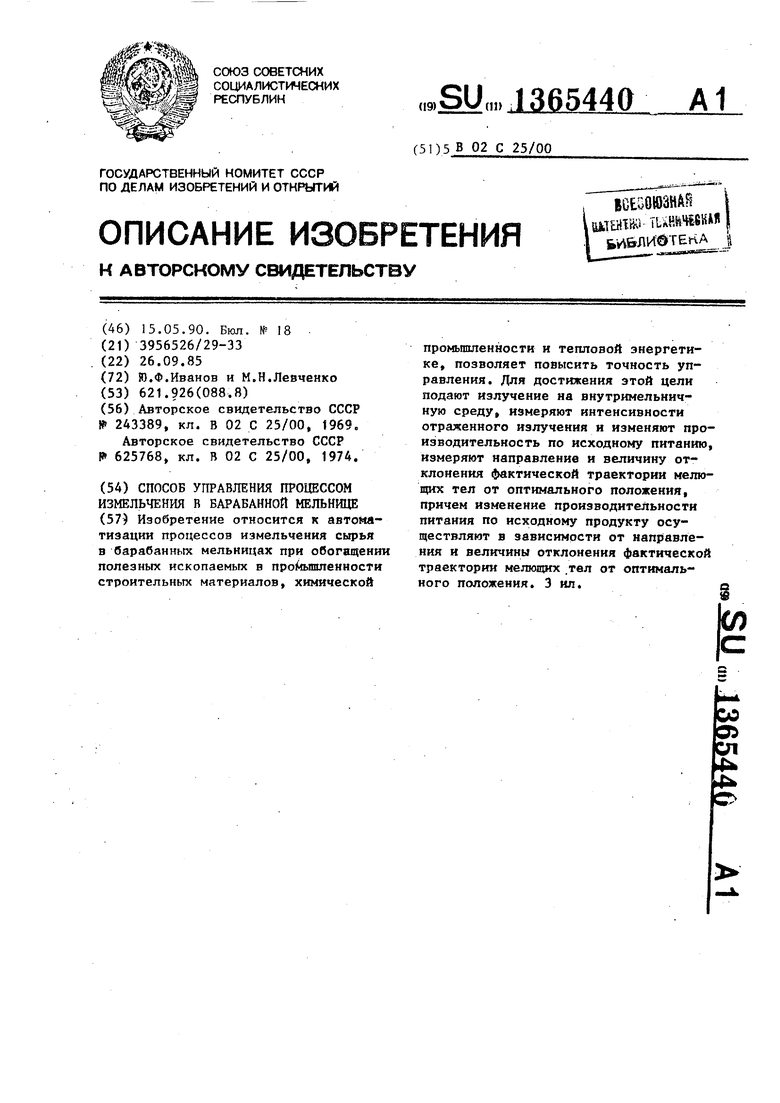
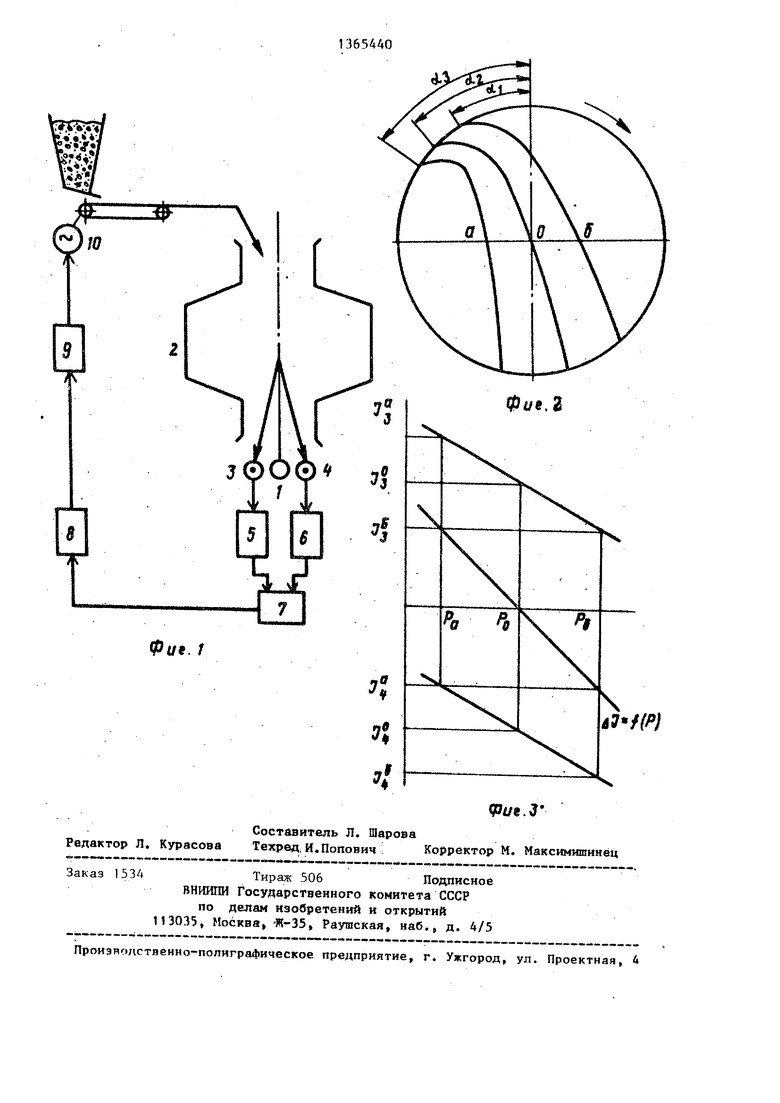
На фиг. 1 приведена блок-схема для ю В способе указанный прибор используосуществления предлагаемого способа; на фиг. .2 - график, иллюстрирующий три типичных случая расположения траектории мелющих тел; на фиг. 3 - график, иллюстрирующий совместную характеристику двух-детекторов, используемую для управления.
Сущность изобретения заключается в следующем.
Положение траектории мелющих тел является мгновенным универсальным показателем эффективности измельчения, представляющим собой сумму всех воздействий и возмущений независимо от природы их возникновения. При изменении физико-механических свойст исходного материала, при колебании
крупности, плотности и вязкости яуль пы в барабане, при сегрегации материала или накапливании трудноизмельчаемых критических классов, при колебаниях циркулирзпощей нагрузки вследствие изменения угла отрыва мелющих тел происходят одновременные отклонения траектории от первоначального оптимального положения. Возвратить траекторию к заданному оптимуму можн изменением подачи исходного материала, не ожидая, когда изменение условий измельчения скажется на степени заполнения и тем более на крупности разгрузки мельниць. Единственным условием успешного функционирования способа является необход{я 1ость обеспечения производительности питания, достаточной для оперативной компенсации отклонений траектории от оптимального положения,
П р и м е р,- В способе управления (фиг. 1) процессом измельчения в барабанной мельнице для оптимизации помола используется способность, нап pjtMep, -излучения контролирова ть плотность потока падающих мелющих тел. Для этого располагают источник излучения в зоне одной горловины мельницы 2 и ориентируют, излучатель на заданное оптимальное положение траектории мелющих тел вдоль оси вра
0
5
0
ется как индикатор отклонения траектории от заданного оптимального положения i При совпадении фактической траектории с заданным оптимальным положением интенсивности сигналов детекторов Ij и 1 должны быть равны, а если они при этом не равны, то легко уравниваются в блоках 5 и 6 контроля, куда поступают с соответствующих детекторов. Блоки контроля входят в комплект РИЗМ. Электрические сигналы с блоков 5 и 6 контроля поступают на блок 7 разностного измерителя типа. В блоке 7 определяются знак и модуль разности в случае неравенства указанных сигналов, когда фактическая траектория мелющих тел начинает дрейфовать от заданного оптимального положения с изменением условий измельчения. Полученньй таким образом сигнал рассогласования подается на электронный регулятор 8, управляющий сигнал от него поступает в блок 9 преобразователя, который управляет двигателем 10 питателя. Даны три наиболее часто встречающихся случая расположения траектории при разных углах 0 отрыва мелющих тел (фиг. 1).
Если координата оптимальной траектории находится в точке О, найденной, например, методом активного планированного эксперимента, то при изменении условий измельчения сразу же на- 5 чинается смещение фактической координаты влево или вправо от точки О. В традиционных способах управления обычно приходится ждать, когда это отклонение приведет к измененшо степени заполнения мельницы,плотности или крупности измельченного продукта или другим нежелательным последствиям, когда управляющее воздействие по этим показателям будет запоздавшим. На практике это приводит к недоиспользованию измель- чительных возможностей, когда мельница либо недогружена и пpoиcxoдиt интенсивный износ футеровки и мелющчх тел, либо перегружается вследствие .
5
0
0
55
накопления критических классов. При этом неизбежны нежелательные изменения ситовых характеристик измельченного продукта.
Отклонение координаты от оптимума траектории моментально приводит к разбалансу между блоками 5 и 6 контроля (фиг. 1), который обнаруживается разностным блоком 7.
Для удобства рассматриваются три характерных случая прохождения траектории мелющих тел через точки а, О, (Лиг. 2) и характеристи сигналов I. и I4 от детекторов 3 и 4 в зависимости от координаты Р траектории, показанные на фиг. 3.
При совпадении фактической и заданной координат траектории мелющих тел в оптимальной точке О интенсивности Ij и I обратнорассеянного излучения (или соответствующие им электрические сигналы .на вьгходе блоков 5 и 6) равны. С перемещением траектории в точку а при изменении угла отрыва мелющих тел из-за изменившихся условий измельчения возрастает интенсивность Ij с одновременны уменьщением I. И наоборот при фактической координате траектории в точке б интенсивность I будет вьше I,. На фиг, 3 показана совместная характеристика двух детекторов (P), используемая для управления. В точке О 41 . О и сигнал управления отсутствует, С преобладанием сигнала приемника 3 исходное питание увеличивают до возвращения траектории в точку О и восстановления баланса между
Способ управления процессом из- ,нельчения в барабанной мельнице, включающий подачу излучения на внут- римельничную среду измерение интенсивности отраженного излучения и изменение производительности по исходному питанию, отличающийс тем, что, с целью повьшения точности управления, измеряют направление и величину отклонения фактической траектории мелющих тел от оптимального положения, причем изменение произвосигналами, когда помол наиболее эф- 40 фективен. При преобладании ; сигнала приемника 4 исходное питание уменьшают до восстановления баланса.
Применение способа управления мельницей обеспечивает высокую чувст- с Дительности питания по исходному вительность и точность управления за продукту осуществляют в зависимости счет использования двойного прираще- от направления и величины отклонения ния Al (фиг. 3); оперативность управ- фактической траектории мелющих тел ления по сравнению с традиционными от оптимального положения.
0
5
0
5
0
5
способами за счет использования мгн . венного и универсального показателя эффективности помола - координаты траектории мелющих тел; не требуется градуирование средств контроля, связанное обычно со значительными трудностями на проиводстве, имеющем регламентированные условия; обеспечивает универсальность применения способа для любого типоразмера мельницы; высокую надежность вследствие использования серийных стандартных средств контроля и регулирования.
Таким образом, постоянно и оперативно поддерживается оптимальный .режим с максимальным использованием измельчительных возможностей агрегата. Это позволит получить максимальный выход заданного класса при минимальной дисперсии колебаний крупности в разгрузке мельницы. Благодаря указанным преимуществам производительность мельницы повьппается на 2-4% и стабилизируется качество продукта измельчения, что, в свою очередь, повышает эффективность и качество последующих технологических операций.
Формула изобрете-ния
Способ управления процессом из- ,нельчения в барабанной мельнице, включающий подачу излучения на внут- римельничную среду измерение интенсивности отраженного излучения и изменение производительности по исходному питанию, отличающийся тем, что, с целью повьшения точности управления, измеряют направление и величину отклонения фактической траектории мелющих тел от оптимального положения, причем изменение произво0
с Дительности питания по исходному продукту осуществляют в зависимости от направления и величины отклонения фактической траектории мелющих тел от оптимального положения.
| 0 |
|
SU243389A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления загрузкой шаровой барабанной мельницы | 1976 |
|
SU625768A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
