со
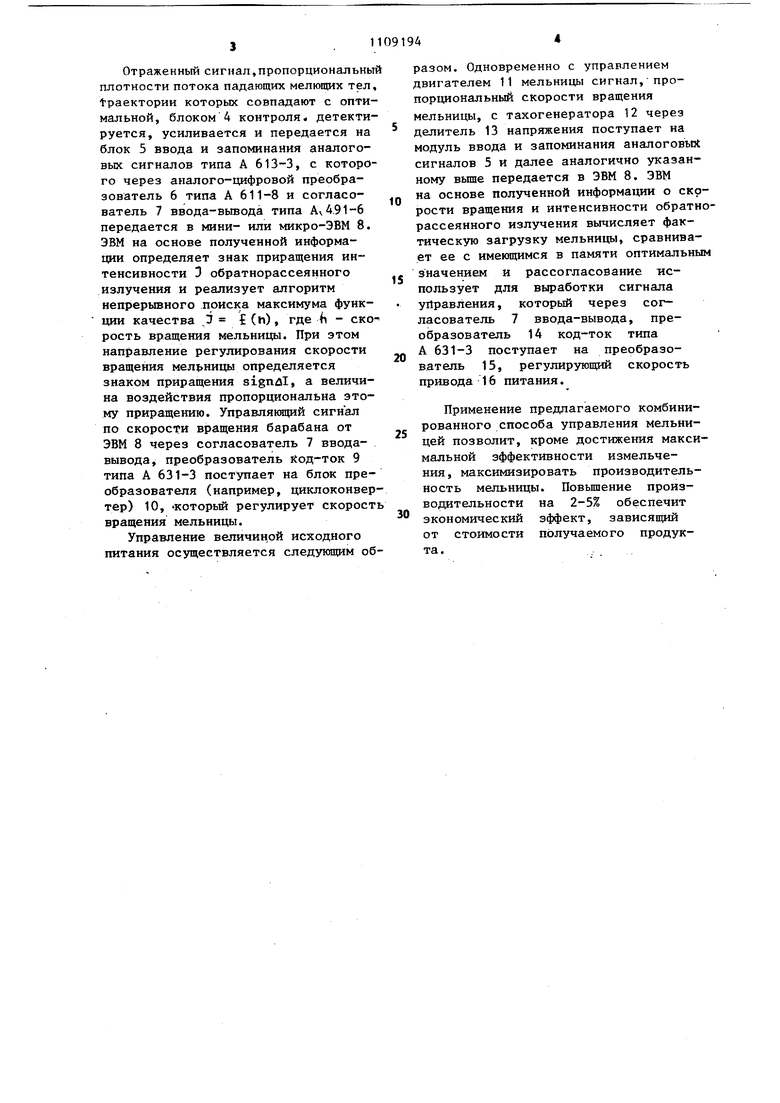
CIO 4 1. Изобретение относится к автоматизации процесса измельчения сьфья в б рабанных мельницах при обогащении полезных ископаемых, в промышленност строительных 1 атериалов, химической промышленности и тепловой энергетике Известен способ управления процес сом измельчения, заключающийся в измерении степени заполнения и геометрии движения внутримельничной загруз ки с вычислением оптимальной геометрии и последующим воздействием на скорость вращения мельницы для устранения отклонения текущей геометрии от отптимальной С13. Наиболее близким к изобретению по технической сущности является способ управления процессом измельчения в барабанной мельнице, включающий пода чу излучения, измерение плотности прохождения падающих тел через ось вращения барабана путем контроля интенсивности отраженного излучения, изменение скорости вращения мельницы до достижения интенсивности отраженного излучения максимально возможного значения L23 Недостатком известных способов яв ляется немаксимальное использование из мельчи тельных возмож ностей агрегат Цель изобретения - повьппени, качес ва управления. Эта цель достигается тем, что согласно способу .управления процессом измельчения в барабанной мельнице, включающему подачу излучения, измерение плотности прохождения падающих тел через ось вращения барабана путем контроля Интенсивности отраженног излучения,изменение скорости вращения мельницы до достижения интенсивностью отраженного излучения максимально возможного значения, измеряют скорост вращения мельницы, определяют фактическую внутримельничную загрузку по величинам интенсивности обратнорассеянного излучения, скорости вращения мельницы и знаку приращения интен сивности и изменяют производительност по исходному питанию по величине разности между фактическим и заданным значениями загрузки мельницы. Сущность способа заключается в сле дующем. Интенсивность обратнорассеянного излучения при известной скорости вращения барабана может быть однозначной мерой загрузки мельницы. На этом 94 2 принципе основана работа радиоизотопноге измерителя заполнения мельниц (РИЗМ). Причем зависимость интенсивности от заполнения однозначна до экстремума характеристики, на правой же ветви характеристики той же интенсивности соответствует другая величина заполнения. Это вытекает из уравнения связи О -64,86+19,064Чш -27,844р + + 1785,28 If +0,394 Чр-20,2Ч-шУ +, +0,.,ц, -783, , где 3 - интенсивность обратнорассеянного излучения, ™2 с u шаровая загрузка,% рудная загрузка,% - скорость вращения барабана, отн.ед. Указанное уравнение регрессии бьшо получено при экспериментальных исследованиях радиоизотопного измерителя заполнения щаровых мельниц (РИЗМШ) на модели барабанной мельницы. В связи с этим и потребовалось синт.езировать предлагаемьй способ, при котором в процессе поис.ка экстремума в микропроцессорном комплексе оценивается направление .движения к экстремуму и учитьшается при расчете фактической загрузки. На фиг.1 приведена блок-схема устройства, реализующего предлагаемый способ управления. Контроль плотности прохождения мелющих тел в оптимальной траектории осуществляется с помощью эффекта отражения, например, гамма-излучения, падающими телами, располагая источник 1 и приемник 2 излучения в зоне одной горловины мельницы 3 и ориенти- ., руя их на оптимальное положение траектории мелющих тел в наиболее показательном этих целей сечении. Таким следует считать сечение барабана, расположенное ближе других к излучателю и приемнику и имеющее наивысшую корреляцию интенсивности отраженного сигнала с плотностью прохождения мелющих тел через оптимальную траекторию. Для осуществления способа можно использовать радиоизотопньй измеритель заполнения мельниц (РИЗМ). Управление скоростью вращения барабана осуществляется следующим образом.
Отраженный сигнал,пропорциональны плотности потока падающих мелющих тел, tpaeктopии которых совпадают с оптимальной, блоком 4 контроля, детектируется, усиливается и передается на блок 5 ввода и запоминания аналоговых сигналов типа А 613-3, с которого через аналого-цифровой преобразователь 6 типа А 611-8 и согласователь 7 ввода-вьгоода типа Av491-6 передается в мини- или микро-ЭВМ 8. ЭВМ на основе полученной информации определяет знак приращения интенсивности D обратнорассеянного излучения и реализует алгоритм непрерывного поиска максимума функции качества .Ь € (и), где 4 - скорость вращения мельницы. При этом направление регулирования скорости вращения мельницы определяется знаком приращения signal, а величина воздействия пропорциональна этому приращению. Управляющий сигнал по скорости вращения барабана от ЭВМ 8 через согласователь 7 вводавывода, преобразователь код-ток 9 типа А 631-3 поступает на блок преобразователя (например, циклоконвертер) 10, Который регулирует скорость вращения мельницы.
Управление величиной исходного питания осуществляется следующим образом. Одновременно с управлением двигателем 11 мельницы сигнал,пропорциональный скорости вращения мельницы, с тахогенератора 12 через
делитель 13 напряжения поступает на модуль ввода и запоминания анапоговьп4 сигналов 5 и далее аналогично указанному вьппе передается в ЭВМ 8. ЭВМ
на основе полученной информации о скорости вращения и интенсивности обратнорассеянного излучения вычисляет фактическую загрузку мельницы, сравнивает ее с имеющимся в памяти оптимальным
- значением и рассогласование использует для выработки сигнала уйравления, который через согласователь 7 ввода-вывода, преобразователь 14 код-ток типа
А 631-3 поступает на преобразователь 15, регулирующий скорость привода 16 питания.
Применение предлагаемого комбинированного способа управления мельницей позволит, кроме достижения максимальной эффективности измельчения , максимизировать производительность мельницы. Повышение производительности на 2-5% обеспечит экономический эффект, зависящий от стоимости получаемого продукта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления процессом измельчения в барабанной мельнице | 1985 |
|
SU1247084A1 |
| Способ управления процессом измельчения в барабанной мельнице | 1982 |
|
SU1014588A1 |
| Способ управления процессом помола в мельнице | 1984 |
|
SU1186256A1 |
| Способ управления процессом измельчения в барабанной мельнице | 1985 |
|
SU1365440A1 |
| Способ управления процессом измельчения в барабанной мельнице | 1979 |
|
SU910193A1 |
| Способ оптимального управления работой мельницы самоизмельчения | 1977 |
|
SU740281A1 |
| Способ управления измельчением твердых материалов | 1988 |
|
SU1604480A1 |
| Способ автоматического определения режима перегрузки шаровой мельницы | 1978 |
|
SU772588A1 |
| МЕЛЮЩЕЕ ТЕЛО | 1991 |
|
RU2019999C1 |
| Способ управления загрузкой барабанной мельницы | 1981 |
|
SU1012984A1 |
СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ИЗМЕЛЬЧЕНИЯ В БАРАБАННОЙ МЕЛЬНИЦЕ, I включающий подачу излучения, измерение плотности прохождения падакицих тел через ось вращения барабана путем контроля интенсивности отраженного излучения, изменение скорости вращения мельницы до достижения интенсивностью отраженного излучения максимально возможного значения, отличающийся тем, что, с целью повьшения качества управления, измеряют скорость вращения мельницы, определяют фактическую внутримельничную загрузку по величинам интенсивности обратнорассеянного излучения, скорости вращения мельницы и знаку приращения интенсивности и изменяют производительность по исходному питанию по величине разности Щ между фактическим и заданным значения(Л ми загрузки мельницы.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ автоматического управленияСКОРОСТью ВРАщЕНия бАРАбАННОйМЕльНицы | 1979 |
|
SU808157A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления процессом измельчения в барабанной мельнице | 1982 |
|
SU1014588A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
