Изобретение относится к автомати- ке процессов измельчения сырья в барабанных мельницах при обогащении полезных ископаемых в промышленности строительных материалов, химической промышленности и тепловой энергетике.
Цель изобретения - повышение точности и надежности управления.
Сущность способа заключается в следующем.
Контролируя интенсивность отраженного излучения и управляя скоростью вращения мельницы до достижения указанной интенсивностью максимально
возможного для текущих условий значе- 15 излучений позволяет повысить вдвое
ния, добиваются максимального дробящего эффекта измельчающей среды. Это позволяет в любых реально сложившихся условиях измельчения получить максимально возможную для них производи- тельность по готовому классу. Так, например, при изменении измельчае- мости руд, с износом футеровки и мелющих тел, при колебаниях крупности, вязкости и плотности внутри- мельничной среды, при сегрегации материала в мельнице и изменении толщины постели, при колебаниях циркулирующей нагрузки предлагаемый способ обеспечивает максимально возможную при этом эффективность помола. Однако в большинстве случаев необходимо активно воздействовать на условия измельчения для максимального исполь- :3ования измельчительных возможностей агрегата. Это может быть обеспечено в предлагаемом способе коррекцией величины исходного питания по знаку и модулю разности интенсивностей отраженного и ослабленного потоков излучения, так как указанные отклонения процесса измельчения от технологического оптимума в результате сказываются на величине внутримельничной загрузки. Существующие способы конт- роля загрузки мельниц, используемые для управления исходным питанием, если и пригодны для случая с переменной траекторией мелющих тел, то вследствие указанных колебаний не обладают необходимыми для управления быстродействием и точностью.
Вследствие стабилизации оптимального положения траектории мелющих тел интенсивности отраженного и ослаблен- ного излучений постоянно находятся в экстремальной области, но разнополяр- ны. Когда при ухудшении условий из
мельчения мельница начинает пер епол- няться, отраженное излучение растет с одновременным уменьшением ослабленного, и наоборот при интенсивной разгрузке мельницы с недостаточным исходным питанием растет ослабленное излучение и падает отраженное. Поскольку изменения интенсивностей происходят одновременно с изменениями загрузки мельницы, то быстродействие управления зависит только от правильного выбора производительности питателя. Определение разности между интенсив- ностями отраженного и ослабленного
5
0 5 0 5 . 0
5
(вследствие двойного приращения) чувствительность и, следовательно, точность управления по предлагаемому способу.
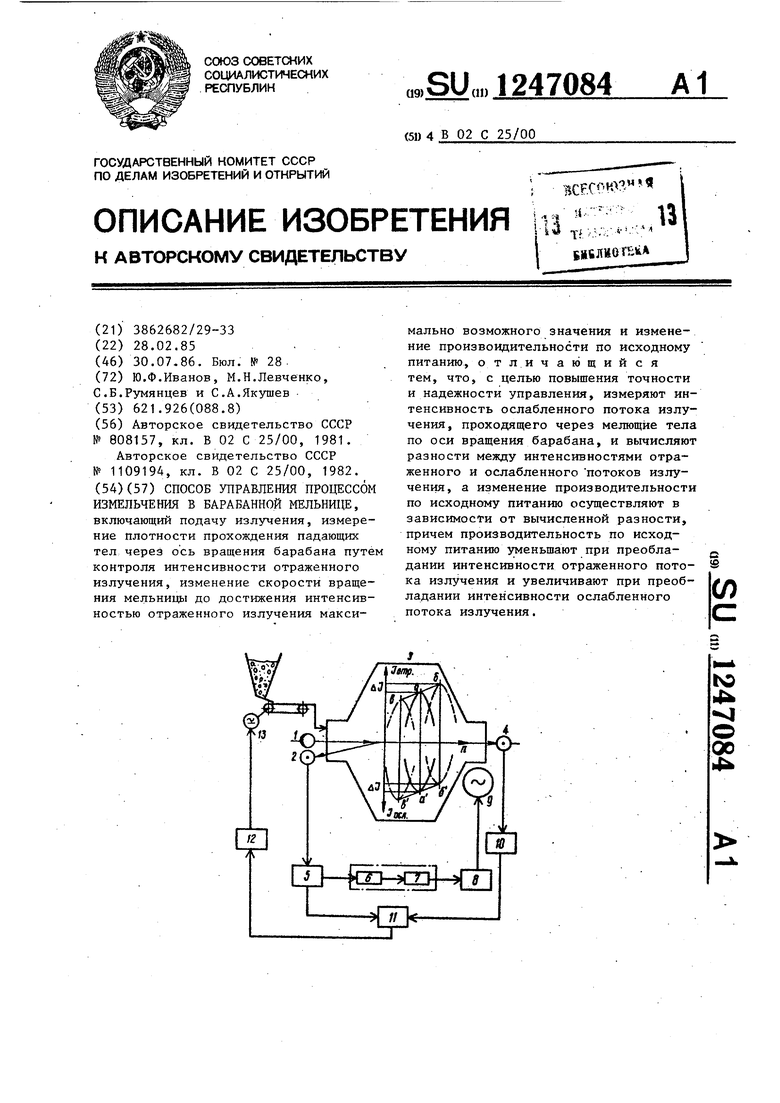
На чертеже изображена блок-схема устройства для осуществления способа.
Для оптимизации помола контроль плотности прохождения падающих мелющих тел через ось вращения барабана осуществляется с помощью эффекта отражения, например -{А-излучения, падающими телами, располагая источник 1 и при- .емник 2 излучения в зоне одной горловины мельницы 3 и ориентируя их на центр вращения барабана, в наиболее показательном для этих целей сечении, которым является сечение барабана, расположенное ближе других к излучателю и приемнику и имеющее наивысшую корреляцию интенсивности отраженного сигнала с плотностью прохождения через центр этого сечения падающих и пересекающих его мелющих тел.
Для организации контура управления исходным питанием в предлагаемом способе у противоположной горловины мельницы по оси вращения барабана устанавливают приемник 4 излучения, ослабленного потоком падающих мелющих тел, траектории которых прошли через ось вращения барабана.
Для осуществления способа может быть использован радиоизотопический измеритель заполнения мельниц (РИЗМ).
Контур управления скоростью вращения мельницы работает следующим образом.
.Отраженный сигнал, пропорциональный плотности потока падающих мелющих тел, траектории которых прощли через центр выбранного сечения, блоком 5 контроля детектируются, усиливается и передается на экстремальный
регулятор. Он состоит из блока 6 определения знака приращения интенсивности обратнорассеянного излучения .sin ul и блока 7 реверса. Для этого может быть использован, например, экстремальньй регулятор ЭЭР-1, который реализует-алгоритм непрерывного поиска максимума функций качества, когда ее производная по входной dl
величине
О, dn
где I - интенсивность отраженного сигнала; п - скорость вращения мельницы {график I f(n) на блок-схеме). При этом направление регулирования задается блоком определения sin41, а скорость воздействия пропорциональна производ- „ dl
НОИ -Г-.
dn
Управляющий сигнал с блока 7 экстремального регулятора поступает на блок преобразователя, который соответствующим образом регулирует скорость двигателя 9 мельницы.
Управление исходным питанием осуществляется следующим рбразом.
Сигнал излучения, ослабленного мелющими телами, траектории которых проЩли через ось вращения барабана, от гГриемника 4 излучения поступает на блок 10 контроля, детектируется, усиливается и подается на блок 11 разностного измерителя. В блоке 11 определяются знак и модуль разности между отраженным и ослабленным излучениями. Полученный таким образом сигнал рассогласования поступает в блок 12 преобразователя, который управляет двигателем 13 питателя.
При работе мельницы с оптимальной загрузкой (точки а и на графике блок-схемы) Igcn и на выходе блоков 5 и 10 сигналы равны, поэтому модуль разности в блоке 11 равен нулю. Питатель работает с постоянной скоростью. При возникновении перегру- за точки а и а перемещаются в положение S и & соответственно, в блоке 11 возникает рассогласование, пропорциональное 2 UI и скорость питатея уменьшается. При снижении загруз15
20
25
30
35
40
45
50
Редактор Е. Копча Заказ 4047/9
Составитель В. Алекперов Техред В.Кадар
ходн что и мелю туре /прои вклю осла т.е-, на гр водит искод образ обесп менен редел типор
Пр соба мость завис iijj от рости извод но, не рамми вышае вател рузко ния д
I
Кр спосо станд ления приме
Исп соба б и наде изводи регата чество благоп ности переде
Тираж 582
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
10
15
20
25
0
5
0
5
ки от оптимума рабочими точками становятся & и В , а рассогласование +2 д1 приводит к увеличен1Ж1 скорости питателя.
Настройка контура управления исходным питанием ограничивается тем, что при оптимальной загрузке мельни- и оптимальном положении траекторию мелющих тел (т.е. при работающем контуре управления скоростью мельницы) /производится компенсация встречно включенных сигналов отраженного и ослабленного излучений по величине, т.е-, чтобы точки а и о. на графике блок-схемы. Затем производится включение контура управления искодньм питанием в работу. Таким образом, по предлагаемому способу обеспечивается универсальность применения его без предварительного определения характеристик для любого типоразмера мельниц.
При применении предлагаемого способа управления отпадает необходимость предварительного определения зависимости степени загрузки мельни- iijj от интенсивности излучения и скорости вращения барабана, что в производственных условиях затруднительно, не требуется индивидуального программирования мини- или микроэвм, повышается чувствительность, а следовательно, и точность управления загрузкой мельницы за счет использования двойного- приращения 2 al.
I
Кроме того, возрастает надежность способа вследствие использования стандартных .блоков контроля и управления и достигается универсальность применения для любого типоразмера г льниц.
Использование предлагаемого способа благодаря повьшению точности и надежности позволяет повысить производительность измельчительного агрегата на 2-4% и стабилизировать качество продукта измельчения, что благоприятно сказывается на эффективности последующих технологических переделов.
Корректор М.Демчик
Подписное

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления процессом измельчения в барабанной мельнице | 1982 |
|
SU1014588A1 |
| Способ управления процессом измельчения в барабанной мельнице | 1979 |
|
SU910193A1 |
| Способ управления процессом измельчения в барабанной мельнице | 1982 |
|
SU1109194A1 |
| Способ управления процессом измельчения в барабанной мельнице | 1985 |
|
SU1365440A1 |
| Способ управления процессом помола в мельнице | 1984 |
|
SU1186256A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ИЗМЕЛЬЧЕНИЯ | 1998 |
|
RU2149062C1 |
| Способ контроля параметров движения внутримельничной загрузки барабанной мельницы и устройство для его осуществления | 1986 |
|
SU1333412A1 |
| Система автоматического управления измельчительным комплексом | 1983 |
|
SU1146084A1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ИЗМЕЛЬЧИТЕЛЬНЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2779916C1 |
| Способ автоматического управления процессом мокрого измельчения в мельнице, работающей в замкнутом цикле с классифицирующим аппаратом | 1978 |
|
SU722570A1 |
| Способ автоматического управленияСКОРОСТью ВРАщЕНия бАРАбАННОйМЕльНицы | 1979 |
|
SU808157A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления процессом измельчения в барабанной мельнице | 1982 |
|
SU1109194A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
