1JL
СО Э5 СО 00 05
18
.1
(pus.J.
11366386
Изобретение относится к робототехнике и предназначено для позиционирования исполнительных органов манипуляторов.
Целью изобретения является расширение технологических возможностей за счет увеличения числа возможных направлений перемещения исполнительного органа .микроманипулятора.
10
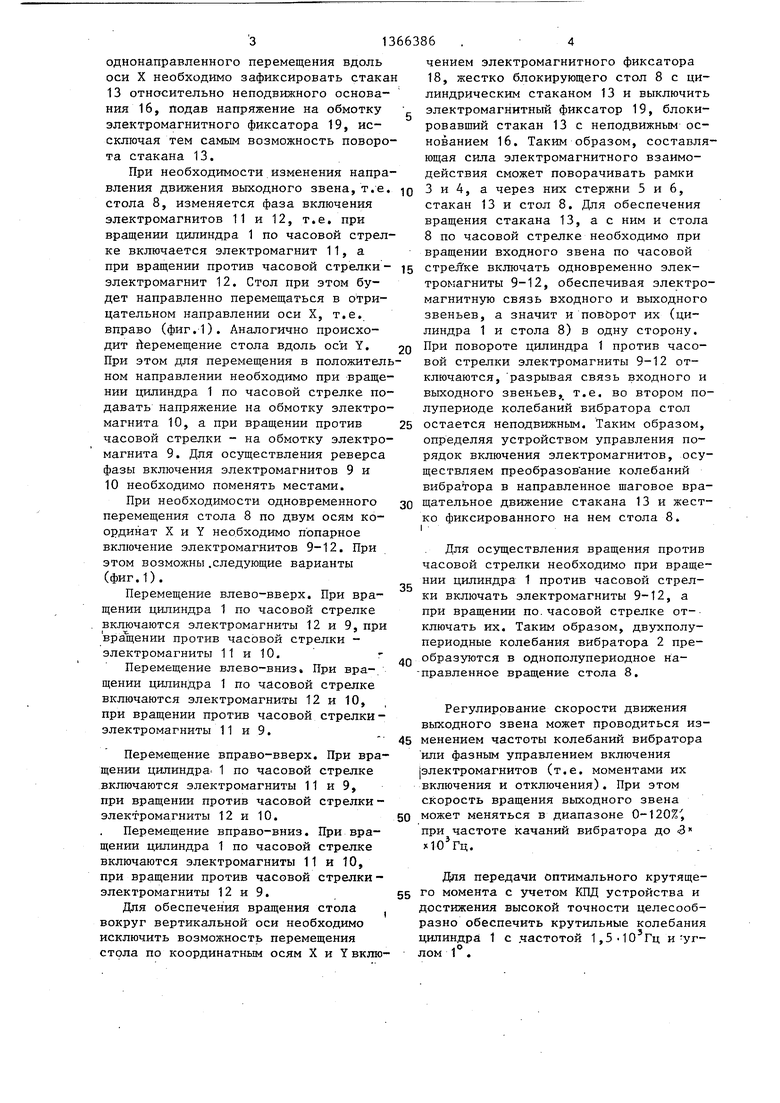
На фиг,1 показан привод микроманипулятора, общий ВИД; на фиг.2 - сечение на фиг.1.
Привод микроманипулятора содержит входное звено, выполненное в виде
цилиндра 1, имеющего зубчатый венец, выполненный на его боковой поверхности. Цилиндр 1 соединен с вибратором 2 крутильных колебаний. Выходное звено двухфазного преобразователя выпол- нено в виде двух рамок З й 4, по крайней мере две стороны каждой из которых расположены параллельно и выполнены из токопроводного материа-j ла. Рамки расположены одна над дру- гой взаимно перпендикулярно, при этом входное звено 1 находится внутри обеих рамок 3 и 4. Рамки 3 и 4 закреплены на взаимно перпендикуляр ных стержнях 5 и 6, установленных в направляющих, образованных стенками 7 прямоугольной полости стола 8, что обеспечивает неза висимость перемещения стола 8 по осям координат. Токо- проводящке стороны рамок 3 и 4 расположены между полюсами электромагнитов 9-12 соответственно, установленных внутри стакана 13 взаимно перпендикулярно. Б стакане 13 выполнены пазы, в которьк размещещ 1 стержни 5 и б рамок 3 и 4. Электромагниты 9-12 совместно с электромагнитом 14, обмотка которого расположена на валу 15, соединяющем входное звено двухфазного цреобразователя движения с вибратором 2 крутильньрс колебаний, необходимы для периодического замыкания магнитного потока через токопро- водящие. пластины рамок 3 и 4, обеспечивая тем самым бесконтактное электромагнитное преобразование колеба- тельного движения вибратора крутильных колебаний в направленное линейно или вращательное движение. Стакан 13 установлен с возможностью вращения относительно неподвижного основания 16 на подшипнике 17. Для обеспечения одного из двух режимов (линейного или вращательного движений) служат
5
0
5
0
5
0
5
электромагнитные фиксаторы 18 и 19, один из которых (18) крепится на стакане 13 и позволяет,жестко фиксировать относительно него стол 8 (в случае вращательного движения). Электромагнитный фиксатор 19 крепится на неподвижном основании 16, обеспечивая жесткую фиксацию относительно него цилиндрического стакана 13 в случае линейного перемещения по .
Устройство для перемещения микроманипулятора снабжено системой управления (не показана), обеспечивающей работу устройства в одном из выбранных режимов.
Принцип действия предлагаемого устройства основан на электромагнит ном преобразовании колебательного движения от вибратора в направленное поступательное или вращательное движение стЪла 8.
Предлагаемое устройство работает следующим образом.
Возможно, три режима работы:
1.Перемещение стола по одной из координат X или Y.
2.Перемещение стола одновременно по обеим координатам X и Y.
Зо Вращение стола вокруг верти- .кальной оси..
Вибратор 2 возбуждает крутильные колебания, передаваемые через вал 151 цилиндру 1. Синхронно с его колебаниями (в случае движения в положительном направлении по оси X) подается напряжение на обмотки электромагнитов 11 и 12, причем при вращении цилиндра 1 по часовой стрелке подается напряжение на обмотку, электромагнита 12, а при вращении цилиндра против часовой стрелки подается напряжение на обмотку электромагнита 11. Поскольку на обмотке электромагнита 14 напряжение присутствует постоянно, то за полный период качания вибратора 2 рамка 4 совершит два последовательных перемещения в положительном направлении оси X, за счет действия электромагнитных сил, увлекающих ее в сторону вращения той части входного звена, кот.орая находится напротив вклю- - ченного в данный момент электромагнита. Поскольку в результате вращения входного звена - цилиндра 1 возникает равнодействующая сил, одна из которых перемещает рамку вдоль оси К, а вторая пытается ее повернуть вокруг дертикальнрй оси Z, то для получения i
однонаправленного перемещения вдоль оси X необходимо зафиксировать стака 13 относительно неподвижного основания 16, подав напряжение на обмотку электромагнитного фиксатора 19, ис- сключая тем самым возможность поворота стакана 13.
При необходимости изменения направления движения выходного звена, т.е стола 8, изменяется фаза включения электромагнитов 11 и 12, т.е. при вращении цилиндра 1 по часовой стрелке включается электромагнит 11, а при вращении против часовой стрелки- электромагнит 12. Стол при этом будет направленно перемещаться в отрицательном направлении оси X, т.е. вправо (фиг.1). Аналогично происходит Аеремещение стола вдоль оси Y. При этом для перемещения в положителном направлении необходимо при вращении цилиндра 1 по часовой стрелке подавать напряжение на обмотку электромагнита 10, а при вращении против часовой стрелки - на обмотку электромагнита 9. Для осуществления реверса фазы включения электромагнитов 9 и 10 необходимо поменять местами.
При необходимости одновременного перемещения стола 8 по двум осям координат X и Y необходимо попарное включение электромагнитов 9-12. При этом возможны .следующие варианты (фиг.1).
Перемещение влево-вверх. При вращении цилиндра 1 по часовой стрелке включаются электромагниты 12 и 9, при вра цении против часовой стрелки - электромагниты 11 и 10.
Перемещение влево-вниз. При вращении цилиндра 1 по часовой стрелке включаются электромагниты 12 и 10, при вращении против часовой стрелки- электромагниты 11 и 9.
Перемещение вправо-вверх. При вращении цилиндра- 1 по часовой стрелке включаются электромагниты 11 и 9, при вращении против часовой стрелки - электромагниты 12 и 10.
Перемещение вправо-вниз. При вращении цилиндра 1 по часовой стрелке включаются электромагниты 11 и 10, при вращении против часовой стрелки - электромагниты 12 и 9.
Для обеспечения вращения стола вокруг вертикальной оси необходимо исключить возможность перемещения стола по координатным осям X и Y вклю10
15
20
2566386 .4
чением электромагнитного фиксатора 18, жестко блокирующего стол 8 с цилиндрическим стаканом 13 и выключить электромагнитный фиксатор 19, блокировавший стакан 13 с неподвижным основанием 16. Таким образом, составляющая сила электромагнитного взаимодействия сможет поворачивать рамки 3 и 4, а через них стержни 5 и 6, стакан 13 и стол 8. Для обеспечения вращения стакана 13, ас ним и стола 8 по часовой стрелке необходимо при вращении входного звена по часовой стреЯке включать одновременно электромагниты 9-12, обеспечивая электромагнитную связь входного и выходного звеньев, а значит и повЬрот их (цилиндра 1 и стола 8) в одну сторону. При повороте цилиндра 1 против часовой стрелки электромагниты 9-12 отключаются, разрывая связь входного и выходного звеньев, т.е. во втором полупериоде колебаний вибратора стол остается неподвижным. Таким образом, определяя устройством управления порядок включения электромагнитов, осуществляем преобразов ание колебаний вибратора в направленное шаговое вращательное движение стакана 13 и жестко фиксированного на нем стола 8.
30
Для осуществления вращения против часовой стрелки необходимо при вращении цилиндра 1 против часовой стрелки включать электромагниты 9-12, а при вращении по.часовой стрелке отключать их. Таким образом, двухполу- периодные колебания вибратора 2 преобразуются в однополупериодное на- правленное вращение стола 8.
Регулирование скорости движения выходного звена может проводиться изменением частоты колебаний вибратора или фазным управлением включения |электромагнитов (т.е. моментами их включения и отключения). При этом скорость вращения выходного звена
может меняться в диапазоне 0-120% при частоте качаний вибратора до «З ..
Для передачи оптимального крутяще- го момента с учетом КПД устройства и достижения высокой точности целесообразно обеспечить крутильные колебания цилиндра 1 с .частотой 1, и-угом 1° .
в виде
с зубчатым венцом на эверхности, выходное зве- со столом, снабженным
Л
:ми, и электромагниты, о т- щ с я тем, что, с це р иийбения технологических возТодност за- счет увеличения числа возмо ых направлений перемещения исполнительного органа мИкроманипулято- ра, он снабжен стаканом, на боковой поверхности которого выполнены поперечные пазы, установленным на основании с возможностью вращения, двумя электромагнитными фиксаторами, один из которых установлен на основании с возможностью взаимодействия со стаканом, а второй установлен на стакане
носительно него, а выходное звено выполнено в виде двух, расположенных одна над другой рамок, по крайней мере две стороны которых расположены параллельно и выполнены из токопро- водного материала, при этом рамки расположены взаимно перпендикулярно в пазах стакана и в направляющих стола с возможностью перемещения каждой рамки перпендикулярно ее параллельным сторонам, а электромагниты установлены попарно и взаимно перпендикулярно внутри стакана по обе стороны каждой рамки и обращены своими полюсами к параллельным сторонам рамок, причем входное звено- установлено аксиально стакану и расположено внутри рамок.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения микроманипулятора | 1982 |
|
SU1073088A1 |
| ВИБРАТОР | 1994 |
|
RU2069442C1 |
| Электродинамический вибратор крутильных колебаний | 1983 |
|
SU1077651A1 |
| ПРИВОД МИКРОМАНИПУЛЯТОРА | 2000 |
|
RU2175601C2 |
| Вибрационный электродвигатель | 1986 |
|
SU1418861A1 |
| Устройство для перемещения,преимущественно,руки манипулятора | 1985 |
|
SU1291384A1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОИМПУЛЬСНОГО НАРАЩИВАНИЯ ИЗНОШЕННЫХ ПОВЕРХНОСТЕЙ ДЕТАЛЕЙ МАШИН | 1994 |
|
RU2094187C1 |
| Амортизирующее устройство | 1980 |
|
SU949247A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2266808C1 |
| РОТАЦИОННЫЙ ПРИВОД МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2266811C1 |

-Изобретелие относится к области робототехники и предназначено для позиционирования исполнительных органов манипуляторов. Целью изобретения является расширение технологических возможностей за счет увеличения числа возможных направлений перемещения исполнительного органа микроманипулятора. В устройстве происходит преобразование колебательного движения входного звена, выполненного в виде цилиндра 1 с зубчатым венцом на его боковой поверхности и соединенного с вибратором, в направленное поступательное или вращательное движение стола 8, связанного с выходным звеном, включающим две расположенные одна над другой взаимно перпендикулярно рамки 3 и 4, внутри которых расположен цилиндр 1. По обе стороны от каждой рамы в стакане 13, являющемся опорой стола 8, расположены электромагниты 9-12, создающие вместе с электромагнитом, расположенным на оси цилиндра 1, магнитный поток, периодически пересекающий стороны рамок 3 и 4, выполненные из токопро- водного материала. 2 ил. SS (Л
/5
фи5.2
| Устройство для перемещения микроманипулятора | 1982 |
|
SU1073088A1 |
