Изобретение относится к -машине- и приборостроению и нредназначено для использования в робототехнических устройствах.
Цель изобретения - расширение функциональных возможностей устройства за счет обеспечения углового перемещения каретки вокруг оси и поступательного перемещения каретки по радиальному направлению относительно этой оси.
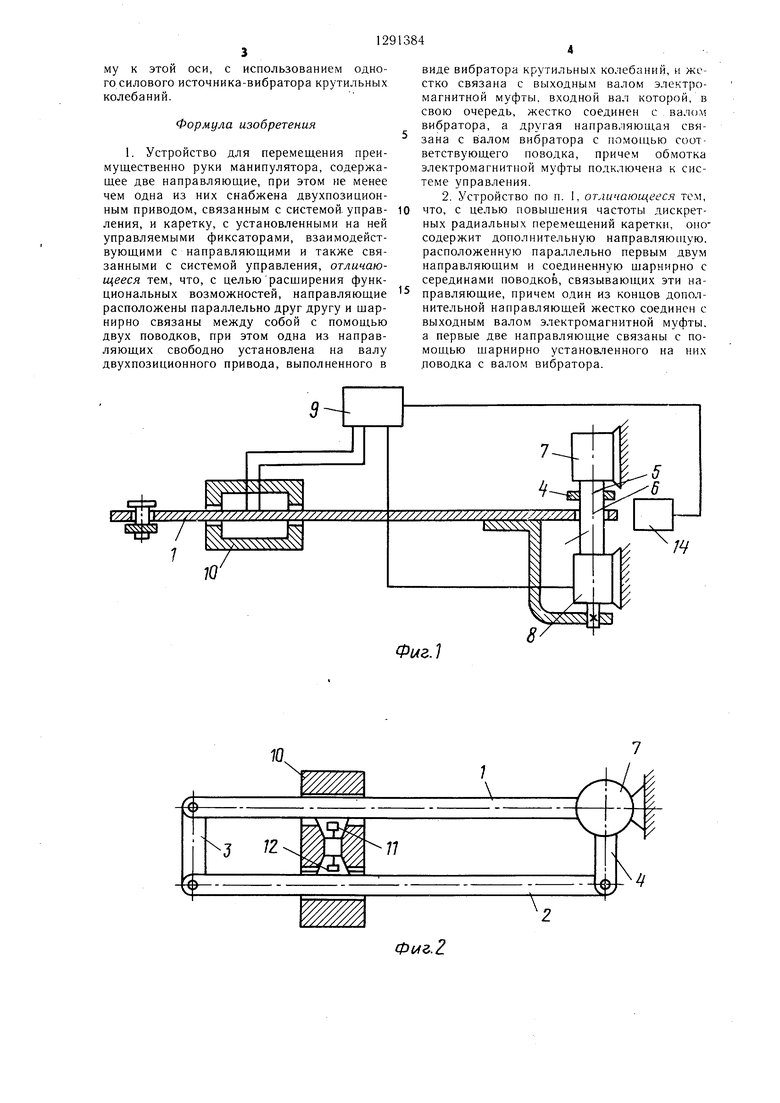
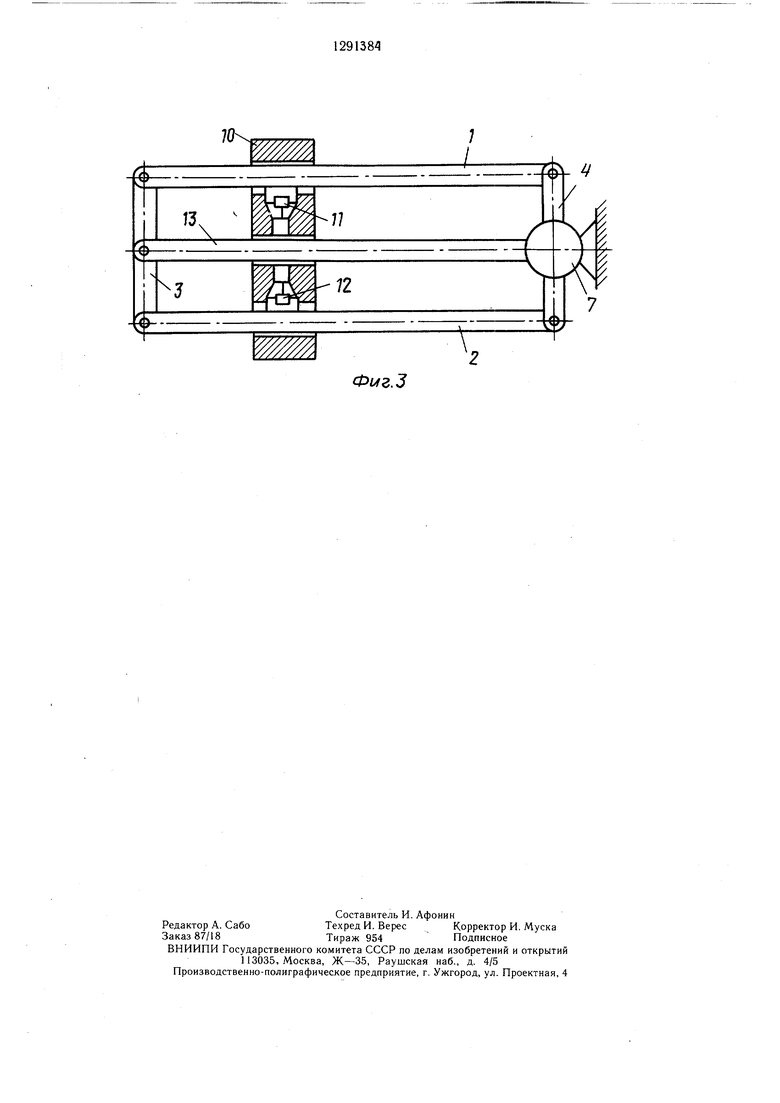
На фиг. 1 показано устройство, вид свер- ху; на фиг. 2 - то же, вид сбоку в варианте с двумя направляющими; на фиг. 3 - то же, в варианте с дополнительной направляющей.
Устройство соде ржит две подвижные направляющие 1 и 2, которые щарнирно свя- заны поводками 3 и 4. Один поводок 4 жестко закреплен на валу 5 шарнира, соединенного с валом 6 двухпозиционного привода, выполненного в виде вибратора 7 крутильных колебаний. С валом 6 соединен входной вал электромагнитной муфты 8 вращения, например, гистерезисной или порошковой. Выходной вал муфты 8 жестко соединен г направляющей 1, ось щарнира которой размешена на оси вала вибратора 7 крутильных колебаний, а обмотка муфты 8 под- ключена к системе 9 управления. В направляющих расположена каретка 10, на которой установлены управляемые фиксаторы, например электромагнитные прижимы 11 и 12, подключенные к системе 9 управления. В качестве системы управления может быть использована микропроцессорная система или микроэвм.
В варианте, изображенном на фиг. 3, введена дополнительная направляющая 13, по которой перемещается каретка 10. Эта направляющая 13 щариирно закреплена на валу 6 и середине поводка 3, соединяющего направляющие 1 и 2. Причем в этом варианте с выходным валом муфты 8 жестко соединена дополнительная направляющая 13, а направляющая 1 так же, как и направляющая 2, связана с валом 6 вибратора 7 посредством поводка 4. Вибратор 7 крутильных колебаний может быть двух типов - синхронным и асинхронным.
При использовании асинхронного вибратора необходимо использование датчика 14 скорости вала 6. Этот датчик 14 подключается к системе 9 управления. В качестве датчика скорости наиболее целесообразно использовать индуктивный датчик, представляющий собой постоянный магнит, закрепленный на валу 6 вибратора, и неподвижную катущку индуктивности, относительно витков которой колеблется магнит. Выводы ка- тущки подключаются к системе 9 управления. В катущке наводится знакопеременная ЭДС, пропорциональная скорости движения магнита. Знак напряжения на выводах катущки определяет направление вращения вала 6.
0
5 0
5
5
0
5
При испольовании электромагнитного синхронного вибратора 7 направление его вращения совпадает со знаком приложенного к нему напряжения питания. Поэтому знак напряжения источника питания может являться источником информации для включения или выключения прижимов 1 1 и 12. В этом случае надобность в датчике 14 скорости отпадает и на систему управления поступает переменное напряжение, соответствующее тому, которым питается вибратор 7 (меньшее по величине).
Устройство работает следующим образом.
Вибратор 7 возбуждает колебания входного вала муфты 8 и через поводок 4 - колебания направляющей 2. Система управления, подает импульсы на обмотку муфты 8 в зависимости от направления вращения вала вибратора 6. Если необходимо, например, обеспечить поворот каретки по часовой стрелке, то импульс управления поступает тогда, когда вал 6 совершает врашение также по часовой стрелке. При поступлении импульсов на обмотку муфты 8 ее выходной вал совершает направленное вращение, что, в свою очередь, вызывает угловой поворот направляющей 1, с которой этот вал жестко связан.
При необходимости поворота каретки 10 относительно вала 6, когда не требуется ее линейное перемещение, включается электромагнитный прижим 11. При этом каретка 10 фиксируется на направляющей 1 и вместе с ней совершает угловой поворот.
Для радиального перемещения каретки 10 на прижимы 11 и 12 поочередно подаются от системы управления импульсы. При этом на фиксатор 12 импульсы подаются тогда, когда требуемое направление движения каретки 10 совпадает с направлением движения направляющей 2. Вращению вала 6 вибратора 7 по часовой стрелке соответствует движение направляющей 2 справа налево.
В конструкции, изображенной на фиг. 3, направляющие 1 и 2 колеблются в противо- фазе. Это позволяет перемещать каретку 10 независимо каждой направляющей и тем самым вдвое повысить частоту дискретного направленного перемещения каретки 10. Угловое перемещение в этом варианте совершает направляющая 13 посредством вращения выходного вала муфты 8. Каретка 10, установленная на этой направляющей, также совершает угловое перемещение. Дополнительный прижим, удерживающий каретку 10 от продольного перемещения, при повороте направляющей 13 условно не показан. Его назначение аналогично прижиму 11 на фиг. 2.
Таким образом, предлагаемое устройство обеспечивает двухкоординатное перемещение каретки 10, при котором она поворачивается вокруг оси вибратора 7 и совершает перемещение по радиусу, перпендикулярному к этой оси, с использованием одного силового источника-вибратора крутильных колебаний.
Формула изобретения
виде вибратора крутильных колебаний, и жестко связана с выходном валом электромагнитной муфты, входной вал которой, в свою очередь, жестко соединен с валом вибратора, а другая направляющая свя- зана с валом вибратора с помощью соответствующего поводка, причем обмотка электромагнитной муфты подключена к системе управления.
2. Устройство по п. 1, отличающееся тем.
1. Устройство для перемещения преимущественно руки манипулятора, содержащее две направляющие, при этом не менее чем одна из них снабжена двухпозиционным приводом, связанным с системой, управ- ю что, с целью повыщения частоты дискрет- ления, и каретку, с установленными на нейных радиальных перемещений каретки, оносодержит дополнительную направляющую, расположенную параллельно первым двум направляющим и соединенную щарнирно с серединами поводков, связывающих эти направляющие, причем один из концов дополнительной направляющей жестко соединен с
управляемыми фиксаторами, взаимодействующими с направляющими и также связанными с системой управления, отличающееся тем, что, с целью расщирения функциональных возможностей, направляющие расположены параллельно друг другу и щарнирно связаны между собой с помощью двух поводков, при этом одна из направляющих свободно установлена на валу двухпозиционного привода, выполненного в
15
выходным валом электромагнитной муфты, а первые две направляющие связаны с помощью щарнирно установленного на них ловодка с валом вибратора.
виде вибратора крутильных колебаний, и жестко связана с выходном валом электромагнитной муфты, входной вал которой, в свою очередь, жестко соединен с валом вибратора, а другая направляющая свя- зана с валом вибратора с помощью соответствующего поводка, причем обмотка электромагнитной муфты подключена к системе управления.
2. Устройство по п. 1, отличающееся тем.
что, с целью повыщения частоты дискрет- ных радиальных перемещений каретки, оно15
выходным валом электромагнитной муфты, а первые две направляющие связаны с помощью щарнирно установленного на них ловодка с валом вибратора.
70
Фиг.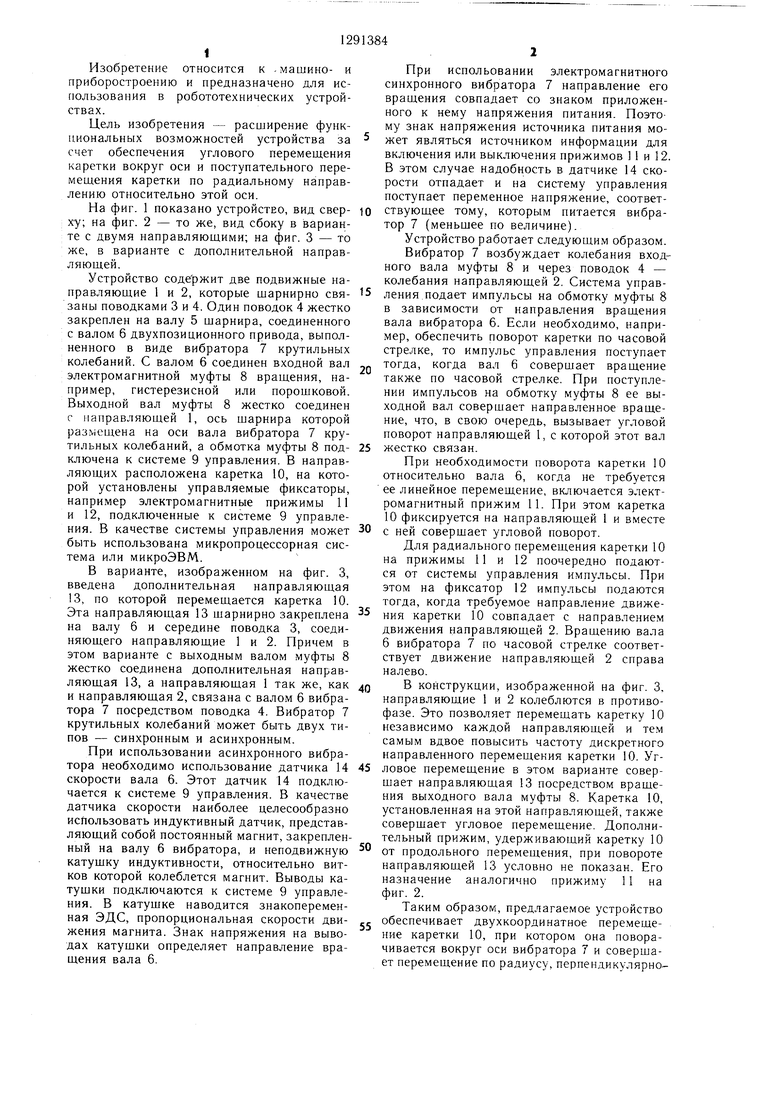
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ шагового перемещения гайки | 1986 |
|
SU1377227A1 |
| Устройство для перемещения материала к прессу | 1986 |
|
SU1388156A1 |
| ВИБРАЦИОННАЯ ЭЛЕКТРОБРИТВА | 1998 |
|
RU2132270C1 |
| УСТАНОВКА ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ ИЗДЕЛИЙ ИЗ БЕТОННЫХ СМЕСЕЙ | 1992 |
|
RU2012497C1 |
| Многопозиционный механизм управления рабочими органами сельскохозяйственной машины | 1990 |
|
SU1784571A1 |
| Способ управления виброприводом манипулятора | 1986 |
|
SU1493458A1 |
| Способ образования мотков проволокии уСТРОйСТВО для ЕгО ОСущЕСТВлЕНия | 1975 |
|
SU844092A1 |
| Устройство для определения вязкоупругих характеристик материалов при крутильных и изгибных колебаниях | 1981 |
|
SU998917A1 |
| Вибрационный электродвигатель | 1986 |
|
SU1418861A1 |
| Автоматический манипулятор | 1989 |
|
SU1660951A1 |
Изобретение относится к машино- и приборостроению и предназначено для использования в робототехнических устройствах. Цель изобретения - расширение функциональных возможностей. Устройство содержит две параллельные направляющие, связанные посредством двух поводков. Один поводок жестко закреплен на валу шарнира, соединенного с валом вибратора крутильных колебаний. С ним же соединен входной вал электромагнитной муфты, выходной вал которой соединен с одной из направ- ляюш,их. В направляющих расположена каретка, на которой установлены управляемые фиксаторы, подключенные к системе управления. Устройство обеспечивает как линейное перемещение каретки по направляющим, так и угловые повороты направляющих вместе с кареткой. 1 з.п.ф-лы, 3 ил. to ;о со 00 4
Фиг.2
. J
| Устройство для перемещения преимущественно руки манипулятора | 1981 |
|
SU1024266A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
