го jun ичес Koio элемента 2 ИЛИ соединен с выходам пятого логического элемента 2 И, второй вход - с выходом шестого логического элемента 2 И, а выход - с входом блока управления, выход которого соединен с третьим входом логического элемента 3 И, вторым входом первого логического элемента 2 И и первым входом седьмого логического элемента 2 И, 5 -вход второго триггера соединен с выходом схемы совпадения, вторым входом пятого логического элемента 2 И, первым входом шестого логического элемента 2 И и счетным входом третьего триггера R -вход второго триггера - с выходом датчика исходного положения и вторым входом четвертого логичесn
701
кого элемента 2 И, а выход второго триггера - с первым входом привода подачи исполнительного механизма, второй вход которого соединен с выхо дом логического элемента 3 И, прямой выход третьего триггера соединен с вторыми входами третьего и шестого логического элемента 2 И, а инверсный выход третьего триггера - с вторым входом второго логического элемента 2 И, первый вход третьего аналогового ключа соединен с вторым выходом блока измерения, а выход четвертого логического элемента 2 И с вторым входом седьмого логического элемента 2 И, выход которого соединен с входом привода установочного вращения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для коррекции дисбаланса коленчатого вала | 1986 |
|
SU1406456A1 |
| Устройство для коррекции дисбаланса | 1985 |
|
SU1273758A1 |
| Устройство для коррекции дисбаланса коленчатого вала | 1982 |
|
SU1035439A1 |
| Измерительное устройство к балансировочному станку | 1982 |
|
SU1037094A2 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1229620A2 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1415092A1 |
| Измерительное устройство станка для балансировки коленчатых валов | 1990 |
|
SU1714401A1 |
| Измерительное устройство к балансировочному станку | 1984 |
|
SU1221516A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1146562A1 |
| Измерительное устройство станка для балансировки коленчатых валов | 1986 |
|
SU1366893A1 |
УСТРОЙСТВО ДЛЯ КОРРЕКЦИИ .ДИСБАЛАНСА КОЛЕНЧАТОГО ВАЛА, содержащее блок измерения, блок отсчета, выполненный в виде схемы совпадения и двух аналоговых ключей, выходы которых соединены между собой и с первым входом схемы совпадения, блок коррекции, выполненный в виде привода установочного вращения, кинематически связанных с ним диска и первого датчика углового положения, исполнительного механизма, кинематически связанного с ним датчика отсчета перемещений, выход которого связан с вторым входом схемы совпадения, и привода подачи исполнительного механизма, датчика исходного положения и датчика ориентации по координате, блок управления и блок формирования команд, включающий логический эле-, мент 3 И, первый вход которого соединен с выходом датчика ориентации по координате, три триггера, инвертор и три логических элемента 2 И, о т л ичающееся тем, что, с целью повышения точности, балансировки, оно снабжено тремя аналоговыми ключами, четырьмя логическими элементами 2 И, двумя логическими элементами 2 ИЛИ, аттенюатором, вход которого подсоединен к выходу блока измерения и к входу второго аналогового ключа, а выход - к входу первого аналогового ключа, вторым и третьим датчиками углового положения, выход каждого из которых соединен соответственно с входом четвертого и пятого аналоговых ключей, фазовым детектором, пер; f вый вход которого соединен с выходом первого датчика углового положения, выход - с вторым входом логического элемента 3 И и входом инвертора, а второй вход - с соединенными собой выходами третьего, четвертого и аналоговых ключей, второй вход каждого из которых соединен с выходом первого, ва-орого и третьего логических элементов 2 И соответственно, первый вход первого логического элемента 2 ИЛИ связан с первым входом логического элемента 3 И, второй вход - с выходом инвертора и первым входом четвертого логического элемента 2 И, а выход со счетным входом первого триггера, прямой выход которого соединен с первыми входами второгб и третьего логических элементов 2 И и вторым входом второго «налогового ключа, а инверсный выход - с первыми входами первого и пятого логических элементов 2 И и вторым входом первого аналогового ключа,с пер вый вход второ
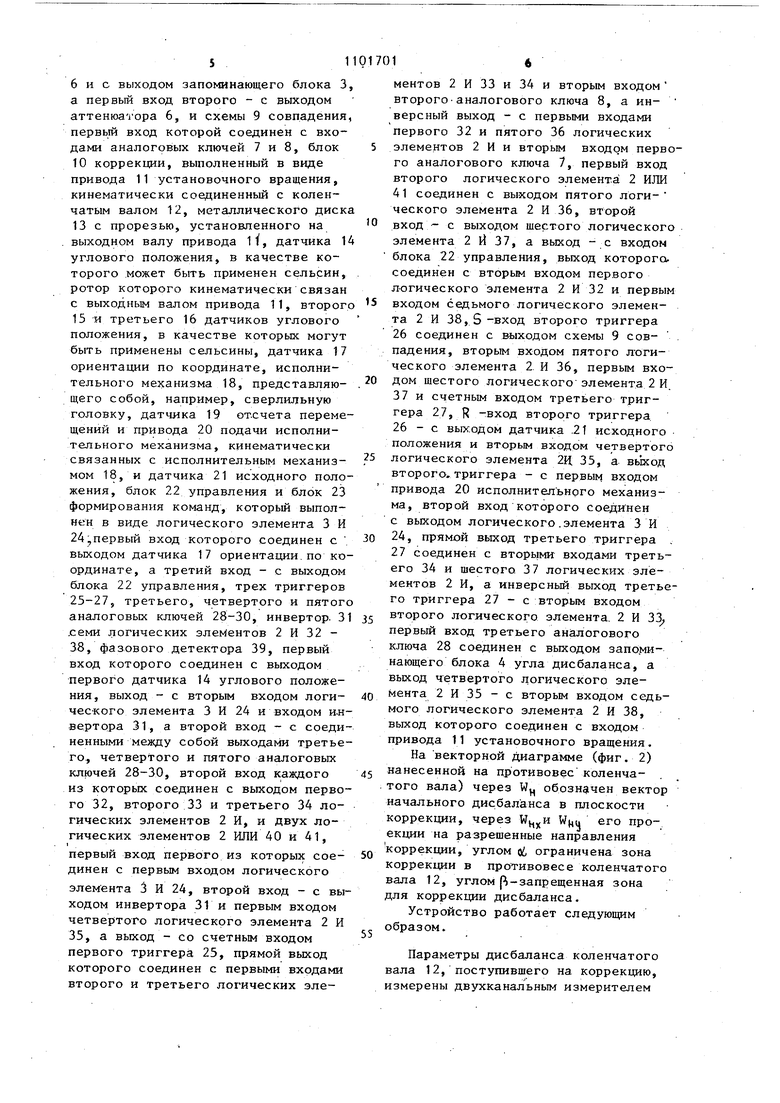
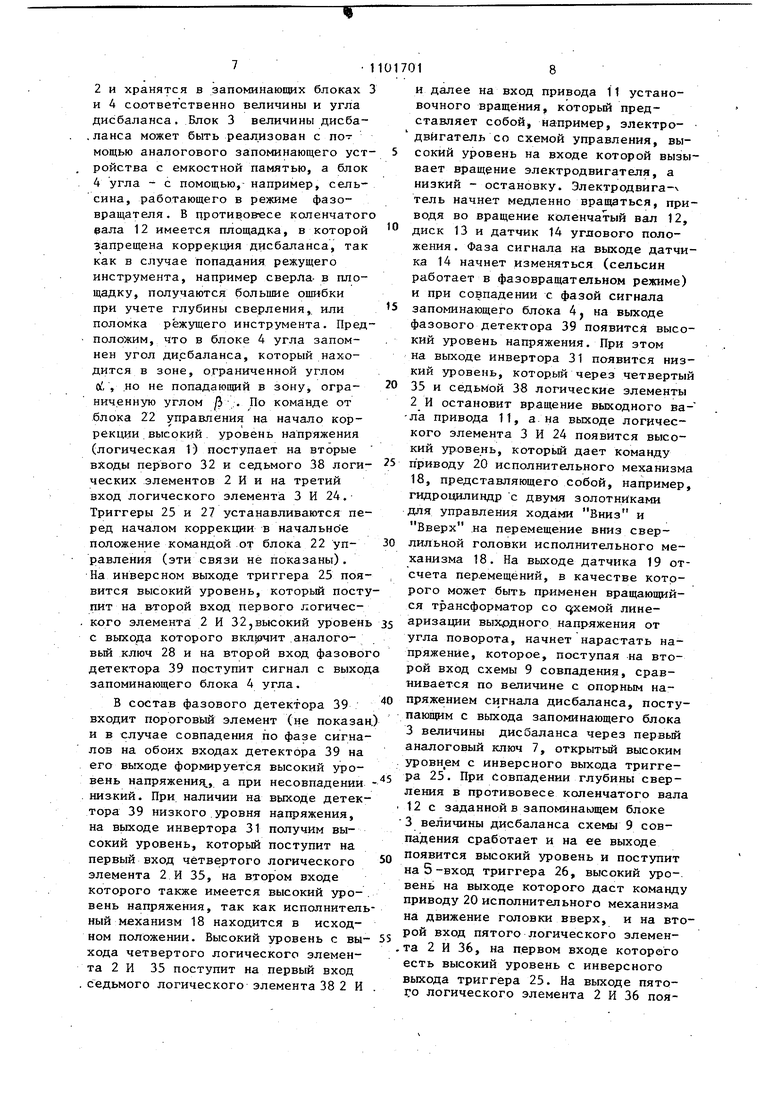
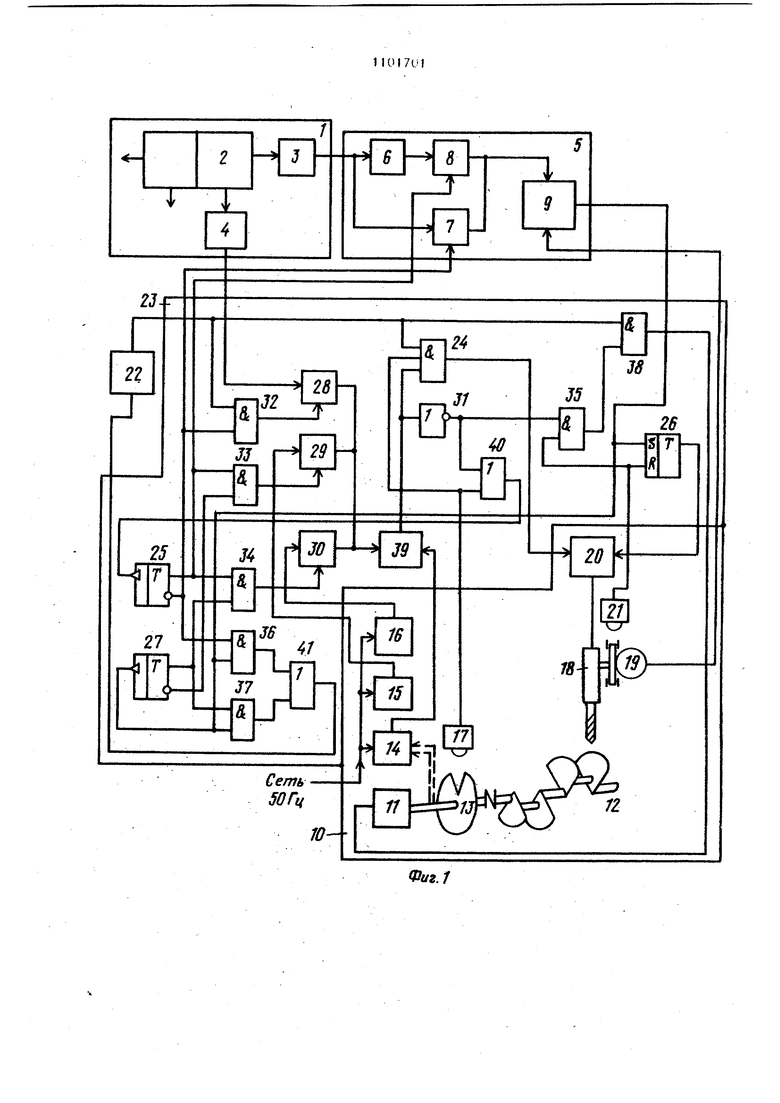
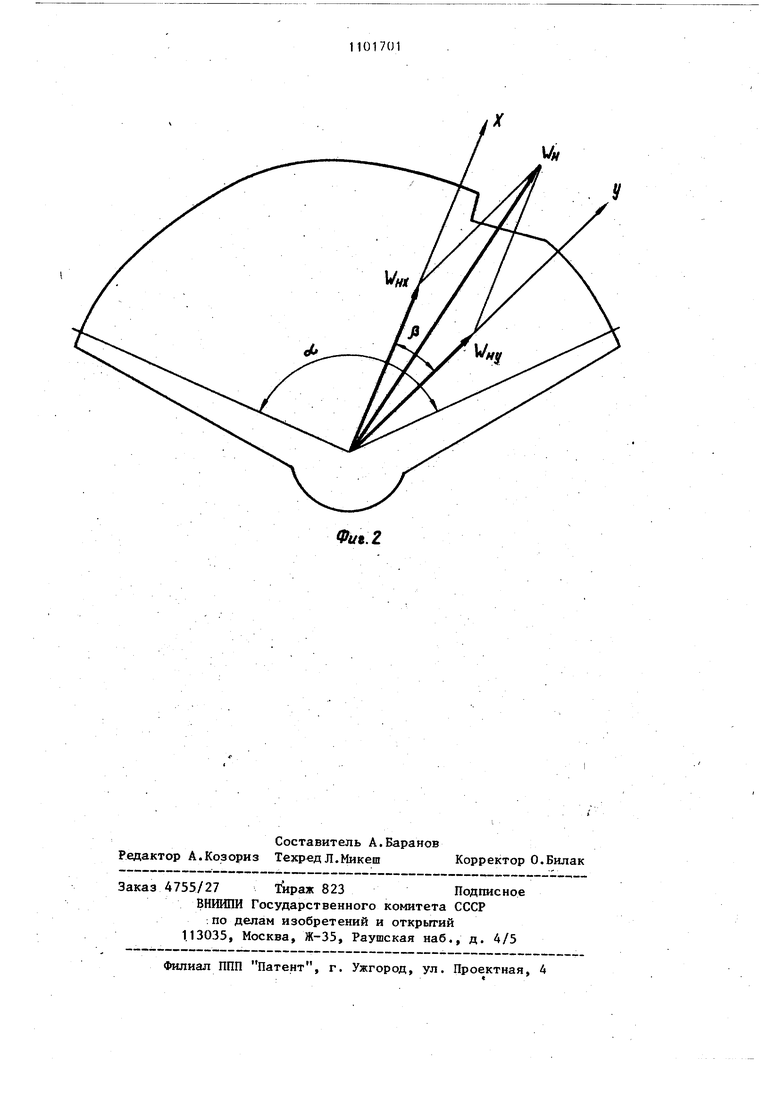
Изобретение относится к балрнсг. ровочной технике, а именно к ср дсгвам автоматической балансировки коленчатых валов. Известно устройство для коррекгдии дисбаланса коленчатого вала, содержа щее последователь}и) соединенные бло измерения, блок отсчета и блок коррекции, выполненньц1 в виде исполнительного мехага1зма и кинематически связанного с ним датчика отсчета перемещений, привода установочного вращени и кинематически связанного с ним датчика углового положения, в качестве которого применен сельси и связанный с бл окаьш блок управ.иения lj . Недостаток данного устройства за ключается -В том, что оно неприменим для коррекции дисбаланса коленчатых валов, в противовесах которых имеются места, запрещенные для-сверления, например технологическая площадка, болты для крепления противовеса и пр. Наиболее близким по технической сущности к изобретению является уст ройство для коррекции дисбаланса коленчатого вала, содержащее, блок измерения, блок отсчета, выполненны в виде схемы совпадения и двух аналоговых ключей, выходы которых сое динены между собой и с первым входом схемы совпадения, блок коррекции, выполненный в виде привода установочного вращения и кине.матически связанных с ним диска и первого датчика углового положения, рсполнительного механизма и кинематически связанного с ним датчика отсчета перемещений, выход которого связан с вторым входом схемы совпадения, и привода подачи исполнительного механизма, датчика исходного положения и датчика ориентации по координате, блок управления и блок формирования команд, включающий логический элемент 3 И, первый вход которого соеjjHHeH с выходом датчика ориентации по координате, три триггера, ин-. вертор и три логических элемента 2 И 2 . i Недостаток известного устройства заключается в том, что в нем не учтено изменение масштаба коррекции при замене одного сверления, попадающего в запрещенную для коррекции зону, двумя сверлениями по краям запрещенной зоны. Это приводит к большим ошибкам при коррекции дисбаланса. Цель изобретения - повышение точности балансировки. 3V о-ч Поставленная цель достигается ТР.м, что устройство для коррекции дисбаланса коленчатого вала, содержащее блок измерения, блок отсчета, вьтолнейный в виде схемы совпадения и двух аналоговых ключей, выходы которых соединены между собой и с первым входом схемы совпадения, блок коррекции, выполненный в виде привода установочного вращения, кинематически связанных с ним диска и первого датчика углоэого положения, исполнительного механизма, кине матически связанного с ним датчика отсчета перемещений, выход которого связан с вторым входом схемы совпадения и привода подачи исполнительного механизма, датчика исходного положения и датчика ориентации по координате, блок управления и блок формирования команд, включающий логический элемент 3 И, первый вход которого соединен с выходом датчика ориентадаи по координате, три триггера, инвертор и три логических элемента 2 И, снабжено тремя аналого выми ключами, четьфьмя логическими элементами 2 И, двумя логическими элементами 2 ИЛИ, аттенюатором, вход которого подсоединен к выходу блока измерения и к входу второго аналогового кпкзча, а выход - к входу первого аналогового ключа, вторым и треть им датчиками углового положения, выход каждого из которых соединен соот ветственно с входом,четвертого и пятого аналоговых ключей, фазовым детектором, первый вход которого соеди нен с выходом первого датчика углового положения, выход - с вторым BXO дом логического элемента 3° И и входом инвертора, а второй вход - с сое диненнь№Ш между собой выходами треть его,, четвертого и пятого аналоговых ключей, второй ;вход из которых соединен с выходом первого, вто рого и третьего логических элементов 2 И соответственно, первый вход первого логического элемента 2 ИЛИ связан с первым входом логического элемента 3 И, второй вход - с выходо инвертора и первым входом четвертого логического элемента 2 И, а .выход со счетным входом первого триггера, прямой выход которого соединен с пер выми входами второго и третьего логических элементов 2 И и вторым входом второго аналогового ключа, а ин7014вареный выход - с первыми входами первого и пятого логических элеме.нтов 2 И и вторым входом первого аналогового ключа, первый вход второго логического элемента 2 ИЛИ соединен с выходом пятого логического элемента 2 И,второй вход - с выходом щестого логического элемента 2 И, а выход - с входом блока управления, выход которого соединен с третьим входом логического элемента ЗИ и вторым входом первого логического элемента 2 И и первым входом седьмого логического элемента 2 И, 5-вход второго триггера соединен с выходом схемы совпадения, вторым входом пятого логического элемента 2 И, первым входом шестого логического элемента 2 И и счетным входом третьего триггера, R -вход второго триггера с выходом датчика исходного положения и вторым входом четвертого логического элемента 2 И, а выход второго триггера - с первым входом привода подачи исполнительного механизма, второй вход которого соединен с выходом логического элемента 3 И, прямой выход третьего триггера соединен с вторыми входами третьего и шестого логических элементов 2 И, а инверсный выход третьего триггера - с вторым входом второго логического элемента 2 И, первый вход третьего аналогового ключа соединен с вторым выходом блока измерения, а выход четвертого логического элемента 2 И с вторым входом седьмого логического элемента 2 И, выход которого соединен с входом привода установочного вращения. На фиг, 1 изображена функциональная схема устройства для коррекции дисбаланса коленчатого вала; на фиг. 2 - векторная диаграмма, поясняющая работу устройства. Устройство для коррекции дисбаланса коленчатого вала содержит блок 1 измерения, выполненный в виде двухканальногр измерителя 2, обеспечивающего измерение параметров дисбаланса в полярной системе координат, запо1 о{накяцего блока 3 величины дисбаланса и запоминающего блока 4 угла дисбаланса, блок 5 отсчета, выполненный в виде аттенюатора 6, двух аналоговых ключей 7 и 8, первый вход первого из которых соединен с вхОЙом аттенюатора 1 6нс выходом запоминающего блока 3, а первый вход второго - с выходом аттенюатора 6, и схемы 9 совпадения, первый вход которой соединен с входами аналоговых ключей 7 и 8, блок 10 коррекции, выполненный в виде привода 11 установочного вращения, кинематически соединенный с коленчатым валом 12, металлического диска 13 с прорезью, установленного на выходном валу привода li, датчика 14 углового положения, в качестве которого может быть применен сельсин, ротор которого кинематически связан с выходным валом привода 11, второго 15 и третьего 16 датчиков углового положения, в качестве которых могут быть применены сельсины, датчика 17 ориентации по координате, исполнительного механизма 18, представляющего собой, например, сверлильную головку, датчика 19 отсчета перемещений и привода 20 подачи исполнительного механизма, кинематически связанных с исполнительным механизмом 18, и датчика 21 исходного положения, блок 22 управления и блок 23 формирования команд, которЬш выполнен в виде логического элемента 3 И 24,первый вход которого соединен с выходом датчика 17 ориентации.по координате, а третий вход - с выходом блока 22 управления, трех триггеров 25-27, третьего, четвертого и пятого аналоговых ключей 28-30, инвертор. 3 .семи логических элементов 2 И 32 38, фазового детектора 39, первый вход которого соединен с выходом первого датчика 14 углового положения, выход - с вторым входом логи чес-кого элемента 3 И 24 и входом и-нвертора 31, а второй вход - с соеди ненными между собой вьгходами третье го, четвертого и пятого аналоговьпс ключей 28-30, второй вход каждого из которых соединен с выходом первого 32, второго 33 и третьего 34 логических элементов 2 И, и двух логических элементов 2 ИЛИ 40 И 41, первый вход первого из которых соединен с первым входом логического элемента 3 И 24, второй вход - с вы ходом инвертора 31 и первым входом четвертого логического элемента 2 И 35, а выход - со счетным входом первого триггера 25, прямой выход которого соединен с первыми входами второго и третьего логических эле16ментов 2 И 33 и 34 и вторым входом второго-аналогового ключа 8, а инверсный выход - с первыми входами первого 32 и пятого 36 логических элементов 2 И и вторым входом первого аналогового ключа 7, первый вход второго логического элемента 2 ИЛИ 41 соединен с выходом пятого логического элемента 2 И 36, второй вход - с выходом шестого логического элемента 2 И 37, а выход - с входом блока 22 управления, выход которого, соединен с вторым входом первого л-огического элемента 2 И 32 и первым входом седьмого логического элемента 2 И 38,S -вход второго триггера 26 соединен с выходом схемы 9 сов- . падения, вторым входом пятого логического элемента 2 И 36, первым входом щестого логическогоэлемента 2 И. 37 и счетным входом третьего триггера 27, R -вход второго триггера 26- с ВЫХ.ОДОМ датчика .21 исходного положения и вторым входом четвертого логического элемента 2й 35, а вьЬсод второго, триггера - с первым входом привода 20 исполнительного механизма, второй вход которого соединен с выходом логического.элемента 3 И 24, прямой выход третьего триггера , 27соединен с вторыми входами третьего 34 и шестого 37 логических элементов 2 И, а инверсный выход третьего триггера 27 - с вторым входом второго логического элемента. 2 И 33, первый вход третьего аналогового ключа 28 соединен с выходом запо.минающего блока 4 угла дисбаланса, а выход четвертого логического элемента 2 И 35 - с вторым входом седьмого логического элемента 2 И 38, выход которого соединен с входом привода 11 установочного вращения. На векторной диаграмме (фиг. 2) нанесенной на противовес коленчатого вала) через W обознч1чен вектор начального дисбаланса в плоскости коррекции, через Wц. его проекции на разрешенные направления коррекции, углом oi ограничена зона коррекции в противовесе коленчатого вала 12, углом -запрещенная зона для коррекции дисбаланса. Устройство работает следующим образом. Параметры дисбаланса коленчатого вала 12, поступившего на коррекцию, измерены двухканальным измерителем
2 и хранятся в запоминающих блоках 3 4 соответственно величины и угла исбаланса. Блок 3 величины дисбаанса может быть реализован с помощью аналогового запоминающего уст- 5 ройства с емкостной памятью, а блок 4 угла - с помощью, например, сельсина, работающего в режиме фазовращателя. В противовесе коленчатого еала 12 имеется площадка, в которой запрещена корре| :ция дисбаланса, так как в случае попадания режущего инструмента, например сверла- в площадку, получаются большие ошибки при учете глубины сверления,, или 5 поломка режущего инструмента. Предположим, что в блоке 4 угла запомнен угол дисбаланса, который находится в зоне, ограниченной углом Oi, , но не попадающий в зону, огра- 20 ниченную углом ,. До команде от блока 22 управления на начало коррекции . высокий . уровень напряжения (логическая 1) поступает на вторые входы nepiBoro 32 и седьмого 38 логи- 5 еских элементов 2 И и на третий вход логического элемента 3 И 24. Триггеры 25 и 27 устанавливаются перед началом коррекции в начальное Положение командой от блока 22 уп- 30 равления (эти связи не показаны). На инверсном выходе триггера 25 появится высокий уровень, который поступит на второй вход первого логического элемента 2 И 32,вьк;окий уровень 35 с выхода которого .аналоговый ключ 28 и на второй вход фазового детектора 39 поступит сигнал с выхода запоминающего блока 4 угла.
В состав фазового детектора 39 входит пороговый элемент (не показан.) и в случае совпадения по фазе сигналов на обоих входах детектора 39 на его выходе формируется высокий уровень напряжения, а при несовпадении
ниэкий. При наличии на выходе детектора 39 низкого .уровня напряжения, на выходе инвертора 31 получим высокий уровень, которьй поступит на первый вход четвертого логического 50 элемента 2 И 35, на втором входе которого также имеется высокий уро-. вень напряжения, так как исполнительный механизм 18 находится в исходном положении. Высокий уровень с вы- 5S хода четвертого логического элемен- ; та 2 И 35 поступит на первый вход
седьмого логического элемента 38 2 И .
и далее на вход привода 11 установочного вращения, который представляет собой, например, электро- двигатель со схемой управления, высокий уровень на входе которой вызывает вращение электродвигателя, а низкий - остановку. Электродвига- тель начнет медленно вращаться, приводя во вращение коленчатый вал 12, диск 13 и датчик 14 углового положения . Фаза сигнала на выходе датчика 14 начнет изменяться (сельсин работает в фазовращательном режиме) и при совпадении с фазой сигнала запоминающего блока 4, на выходе фазового детектора 39 появится высокий уровень напряжения. При этом на выходе инвертора 31 появится низкий уровень, который через четвертый 35 и седьмой 38 логические элементы
2И остановит вращение выходного вала привода 11, а на вькоде логического элемента 3 И 24 появится высокий уровень, который дает команду приводу 20 исполнительного механизма 18, представляющего собой, например, гидроцилиндр с двумя золотниками для управления ходами Вниз и Вверх .на перемещение вниз сверлильной головки исполнительного механизма 18. На выходе датчика 19 отсчета перемещений, в качестве которого может быть пр-именен вращающийся трансформатор со хемой линеаризации выходного напряжения от угла поворота, начнет нарастать напряжение, которое, поступая на второй вход схемы 9 совпадения, сравнивается по величине с опорным напряжением сигнала дисбаланса, поступающим с выхода запоминающего блока
3величины дисбаланса через первый аналоговый ключ 7, открытый высоким
уровнем с инверсного выхода триггера 25. При Совпадении глубины сверления в противовесе коленчатого вала
12 с заданной в запоминающем блоке
3 величины дисбаланса схемы 9 совпадения сработает и на ее выходе появится высокий уровень и поступит на 5-вход триггера 26, высокий уровень на выходе которого даст команду приводу 20 исполнительного механизма на движение головки вверх, и на второй вход пятого логического элемента 2 И 36, на первом входе которого есть высокий уровень с инверсного выхода триггера 25. На выходе пятоi:o логического элемента 2 И 36 появится высокий уровень, который через логический элемент 2 ИЛИ 41 даст команду в блок 22 управлейия об окончании коррекции коленчатого вала 12,
Если начальный дисбаланс коленчатого вала попадает в зону, запрещенную для коррекции (ограниченную УГЛО.М J ), то сверление отверстия по координате X на измеренную блоком 1 глубину приводит к ошибке, пропорциональной sin /2 При угле К приводит к большому процету бракованных коленчатьк валов после балансировки. Замена одного сверления по координате X двумя по обоим координатам, но на меньшую глубину (примерно 1/2W(И зависит от угла р) приводит к сиябке, пропорциональной sin В/А, т.е. уменьшает ошибки при коррекции в 2 раза.
Рассмотрим работу схемы при попадании W в зону, ограниченную углом А .
После ориентации коленчатого вала 12 по углу, соответствующему W прореЗь на диске 13 совпадает с датчиком 17 ориентации по координате и на его выходе получим низкий уровень напряжения, который поступит на первый вход логического элемента 3 И 24 и запретит подвод сверлильной головки вниз. На выходе первого логического элемента 2 ИЛИ 40 при наличии на обоих входах низких уровней появится низкий уровень напряжения, который установит в единичное состояние триггер 25, высокий уровень с прямого выхода которого поступит на первые входы второго 33 и третьего 34 логических элементов 2 И и включит второй аналоговый . ключ 8, на входе которого аналоговы сигнал пропорционален W и WHIJ(OHH равны между собой). При изменении фа зы сигнала на входе фазового детектора 39 на его выходе появится низкий уровень напряжения, а на первом входе четвертого логического элемента 2 И 35 - высокий уровень, который поступит на первый вход седьмого логического элемента 2 И 38
и разрешит вращение электродвигателя привода 11. Фаза сигнала на выходе второго датчика 15 углового положения соответствует координате X, а третьего датчика 16 - координатеY При установке коленчатого вала 12 под координату X на выходе фазового детектора 39 появится высокий уровень, который остановит вращение коленчатого вала 12 и разрешит ход вниз, исполнительного механизма 18 (по аналогии с выше описанным). По окончании сверления отверстия по координате X на глубину, соответствующую в начале перемещения исполнительного механизма 18 вверх, отрицательный фронт импульса с выхода схемы 9 совпадения установит триггер 27 в единичное состояние, высокий уровень с прямого выхода которого через третий логический элемент 2 И 34 включит аналоговый ключ 30, а низкий уровень с инверсного выхода триггера 27 отключит аналоговый ключ 29. Таким образом, к входу фазоЬого детектора 39 вместо второго датчика 15 углового положения окажется подключенным третий датчик 16 углового положения, и низкий уровень с выхода детектора 39 разрешит установочное вращение коленчатого вала 12 после возвращения исполнительного механизма 18 в исходное положение. По аналогии с выще описанным, после окончания сверления по координате Y на глубину Уцц высокий уровень с выхода схемы 9 совпадения поступит на втбро вход шестого логического элемента 2 И 37, с выхода которого через логический элемент 2 ИЛИ 41 поступит в блок 22 управления и даст команду об окончании коррекции дисбаланса, попавшего в запрещенную для коррекции зону.
Таким образом, независимо от углового расположения дисбаланса в зоне противовеса коленчатого вала обеспечиваетфя полностью автоматизированный цикл коррекции дисбаланса, что повысит точность балансировки коленчатых валов.
Фиг 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Основы балансировочной техники | |||
| Под ред | |||
| В.А.Щепетильникова | |||
| .Т | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| М., Машиностроение, 1975, с | |||
| Устройство для выпуска сточных вод в реки | 1923 |
|
SU572A1 |
| , I 2 | |||
| Авторское свидетельство СССР по заявке № 3422790/25-28, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| . | |||
