О5 4
СП
О5
Изобретение относится к балансировочной технике, а именно к средствам автоматической балансировки коленчатых валов.
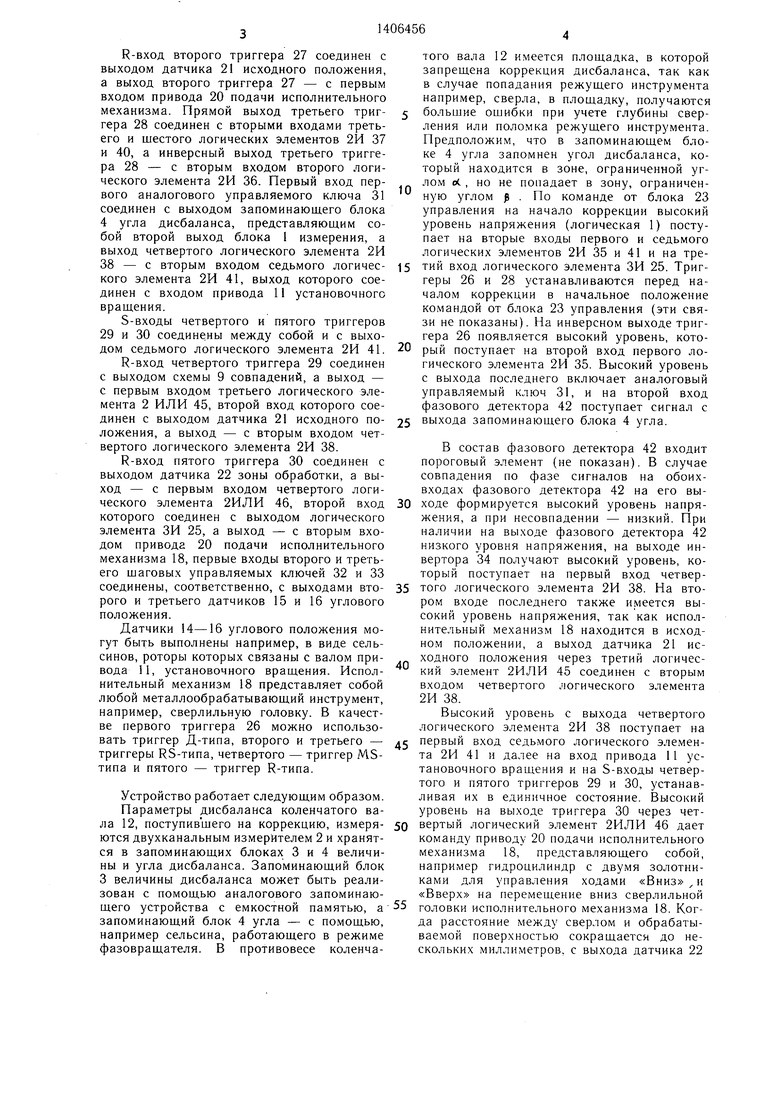
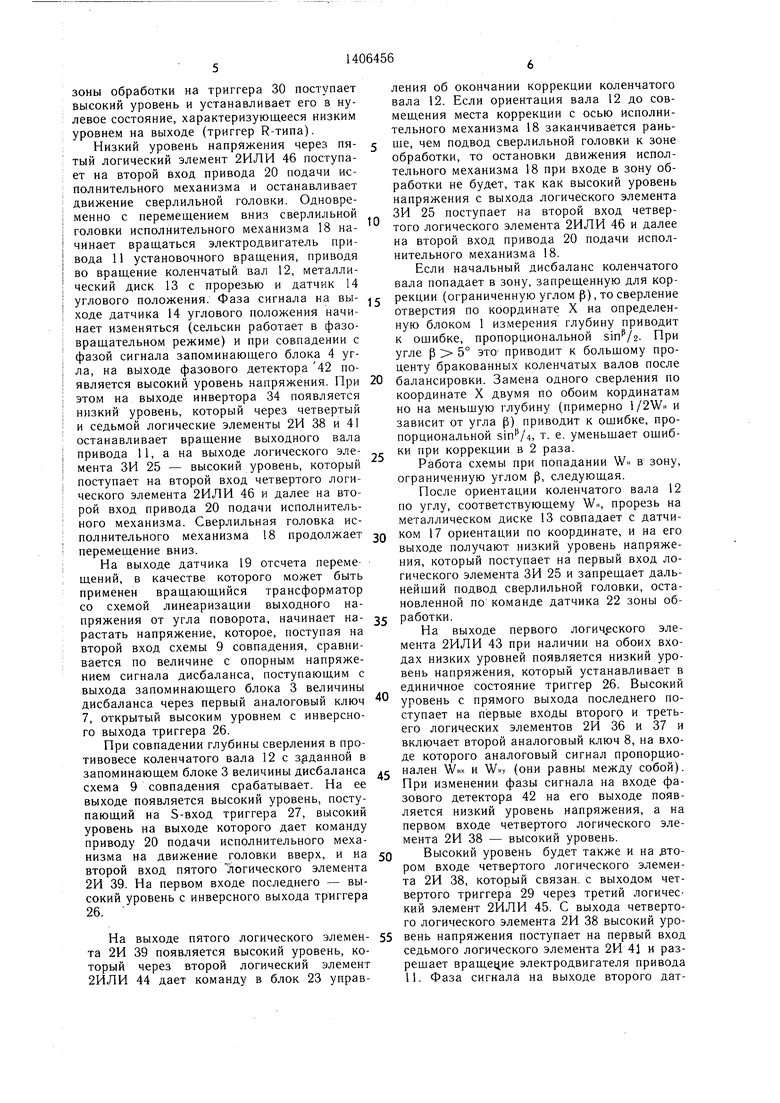
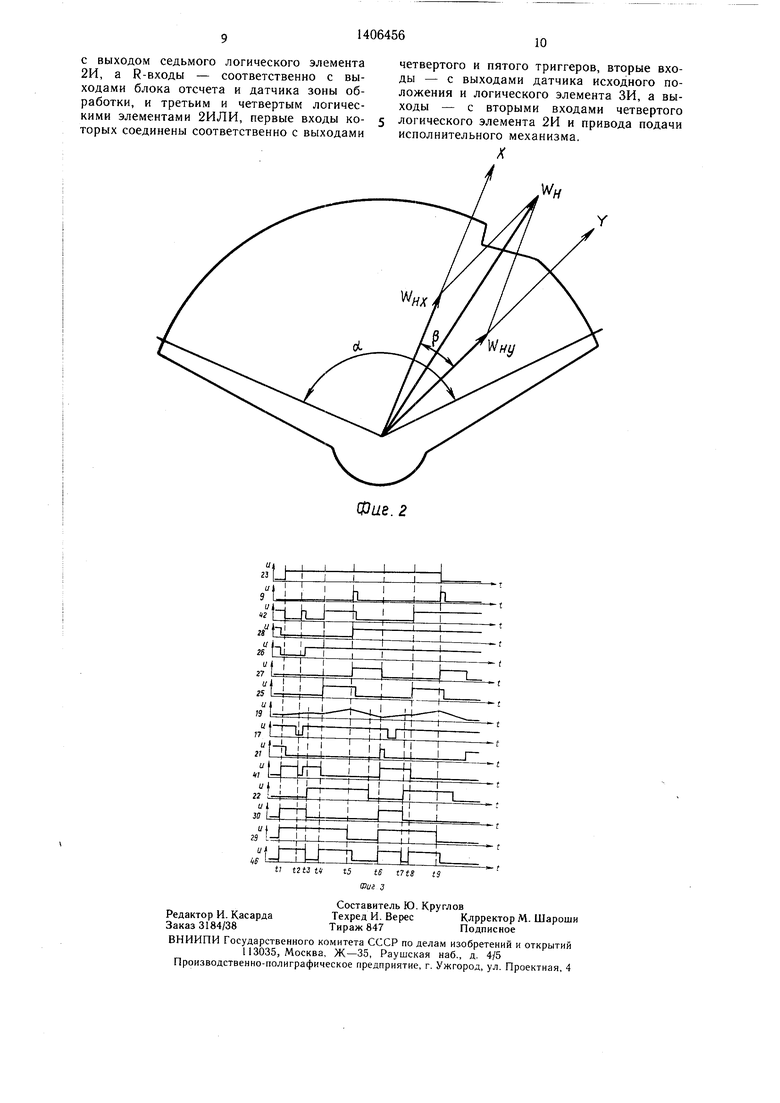
Цель изобретения - повышение произ- одительности за счет одновременного вы- Лолнения операций ориентации коленчато- ifo вала и подвода исполнительного ме- анизма к зоне обработки. : На фиг. 1 изображена функциональная (|хема устройства для коррекции дисбалан- (|а коленчатого вала; на фиг. 2 - вектор- ая диаграмма, нанесенная на противовес коленчатого вала, где W - вектор началь- i|oro дисбаланса в плоскости коррекции, W,,x и Why - его проекции на разрешенные направления коррекции, углом ос ограничена зона коррекции в противовесе колен- 4атого вала, углом р - запрещенная зона ля коррекции дисбаланса; на фиг. 3 - временная диаграмма работы устройства, йа которой указана форма сигналов на иы- |одах элементов устройства, номера эле- ijieHTOB, обозначенные в левой части диаг- ||)аммы, соответствуют номеру элемента на функциональной схеме устройства, приве- Денной на фиг. 1, где t|.- время начала )1,икла коррекции, tj - время ориентиро- ания на площадку, ts - остановка дви- |кения вниз сверлильной головки при входе k зону обработки, (4 - окончание ориентирования на координату X, начало свер- 41ения по координате X, te - окончание (Ьверления по координате X, tr, - начало (Ориентирования на координате У. t - оста- Йовка движения вниз сверлильной головки |1ри входе в зону обработки (сверление по Координате Y), 1 - начало сверления по Координате Y, tg - конец сверления по ко- Ординате Y.
Устройство содержит блок I измерения, выполненный в виде двухканального изме- )ителя 2, предназначенного для измерения параметров дисбаланса в полярных ко- ординатах, соединенных с ним запоминающего блока 3 величины дисбаланса и запоминающего блока 4 угла дисбаланса, блок 5 отсчета, выполненный в виде аттенюатора 6, двух аналоговых ключей 7 и 8, первый вход первого из которых соединен € входом аттенюатора бис выходом запоминающего блока 3 величины дисбаланса, а первый вход второго - с выходом аттенюатора 6, и схемы 9 совпадения, первый вход которой соединен с выходом аналого- вых ключей 7 и 8, блок 10 коррекции, выполненный в виде привода 11 установочного вращения, кинематически соединенного с коленчатым валом 12, металлического диска 13 с прорезью, установленного на выходном валу привода 11, первого датчика 14 углового положения, второго 15 и третьего
16датчиков углового положения, датчика
17ориентации по координате исполнительного механизма 18, датчика 19 отсчета перемещений, выход которого соединен с вторым входом схемы 9 совпадения, представляющей собой четвертый вход блока 5 отсчета, и привода 20 подачи исполнительного механизма, кинематически связанных с исполнительным механизмом 18, датчика 21 исходного положения, предназначенного для определения положения исполнительного механизма 18 при автоматической загрузке коленчатого вала 12, и датчика 22 зоны обработки, предназначенного для контроля положения исполнительного механизма 18 при обработке, блок 23 управления и блок 24 формирования команд, выполненный в виде логического элемента ЗИ 25, первый вход которого соединен с выходом датчика 17 ориентации по координате, а третий вход - с выходом блока 23 управления, пяти триггеров 26-30, первого, второго и третьего аналоговых управляемых ключей 31-33, инвертора 34, семи логических элементов 2И 35-41, фазового детектора 42, первый вход которого соединен с выходом первого датчика 14 углового положения, выход - с вторым входом логического элемента ЗИ 25 и входом инвертора 34, а второй вход - с соединенными между собой выходами первого, второго и третьего аналоговых управляемых ключей 31-33, второй вход каждого из которых соединен с выходом первого 35, второго 36 и третьего 37 логических элементов 2И, и четырех логических элементов 2ИЛИ 43-46 первый вход первого из которых соединен с первым входом логического элемента ЗИ 25, второй вход - с выходом инвертора 34 и первым входом четвертого логического элемента 2И 38, а выход - со счетным входом первого триггера 26, прямой выход которого соединен с первыми входами второго и третьего логических элементов 2И 36 и 37 и вторым входом второго аналогового ключа 8, представляющего собой третий вход блока отсчета, а инверсный выход - с первыми входами первого и пятого логических элементов 2И 35 и 39 и вторым входом первого аналогового ключа 7, представляющего собой вход блока 5 отсчета.
Первый вход второго логического элемента 2ИЛИ 44, соединен с выходом пятого логического элемента 2И 39, второй вход - с выходом шестого логического элемента 2И 40, а выход - с входом блока 23 управления, выход которого соединен с вторым входом первого логического элемента 2И 35 и первым входом седьмого логического элемента 2И 41.
S-вход второго триггера 27 соединен с выходом схемы 9 совпадения, представляющим собой выход блока 5 отсчета, вторым входом пятого логического элемента 2И 39, первым входом шестого логического элемента 2И 40 и счетным входом третьего триггера 28.
R-вход второго триггера 27 соединен с выходом датчика 21 исходного положения, а выход второго триггера 27 - с первым входом привода 20 подачи исполнительного механизма. Прямой выход третьего триггера 28 соединен с вторыми входами третьего и шестого логических элементов 2И 37 и 40, а инверсный выход третьего триггера 28 - с вторым входом второго логического элемента 2И 36. Первый вход первого аналогового управляемого ключа 31 соединен с выходом запоминающего блока 4 угла дисбаланса, представляющим собой второй выход блока 1 измерения, а выход четвертого логического элемента 2И 38 - с вторым входом седьмого логического элемента 2И 41, выход которого соединен с входом привода 11 установочного вращения.
S-входы четвертого и пятого триггеров 29 и 30 соединены между собой и с выходом седьмого логического элемента 2И 41.
R-вход четвертого триггера 29 соединен с выходом схемы 9 совпадений, а выход - с первым входом третьего логического элемента 2 ИЛИ 45, второй вход которого соединен с выходом датчика 21 исходного положения, а выход - с вторым входом четвертого логического элемента 2И 38.
R-вход пятого триггера 30 соединен с выходом датчика 22 зоны обработки, а выход - с первым входом четвертого логического элемента 2ИЛИ 46, второй вход которого соединен с выходом логического элемента ЗИ 25, а выход - с вторым входом привода 20 подачи исполнительного механизма 18, первые входы второго и третьего щаговых управляемых ключей 32 и 33 соединены, соответственно, с выходами второго и третьего датчиков 15 и 16 углового положения.
Датчики 14-16 углового положения могут быть выполнены например, в виде сельсинов, роторы которых связаны с валом привода 11, установочного вращения. Исполнительный механизм 18 представляет собой любой металлообрабатывающий инструмент, например, сверлильную головку. В качестве первого триггера 26 можно использовать триггер Д-типа, второго и третьего - триггеры RS-типа, четвертого - триггер MS- типа и пятого - триггер R-типа.
Устройство работает следующим образом.
Параметры дисбаланса коленчатого вала 12, поступившего на коррекцию, измеряются двухканальным измерителем 2 и хранятся в запоминающих блоках 3 и 4 величины и угла дисбаланса. Запоминающий блок 3 величины дисбаланса может быть реализован с помощью аналогового запоминающего устройства с емкостной памятью, а запоминающий блок 4 угла - с помощью, например сельсина, работающего в режиме фазовращателя. В противовесе коленчатого вала 12 имеется площадка, в которой запрещена коррекция дисбаланса, так как в случае попадания режущего инструмента например, сверла, в площадку, получаются
большие ошибки при учете глубины сверления или поломка режущего инструмента. Предположим, что в запоминающем блоке 4 угла запомнен угол дисбаланса, который находится в зоне, ограниченной углом оС , но не попадает в зону, ограниченную углом р . По команде от блока 23 управления на начало коррекции высокий уровень напряжения (логическая 1) поступает на вторые входы первого и седьмого логических элементов 2И 35 и 41 и на тре5 тий вход логического элемента ЗИ 25. Триггеры 26 и 28 устанавливаются перед началом коррекции в начальное положение командой от блока 23 управления (эти связи не показаны). На инверсном выходе триггера 26 появляется высокий уровень, кото0
0
рыи поступает на второй вход первого логического элемента 2И 35. Высокий уровень с выхода последнего включает аналоговый управляемый ключ 31, и на второй вход фазового детектора 42 поступает сигнал с 5 выхода запоминающего блока 4 угла.
В состав фазового детектора 42 входит пороговый элемент (не показан). В случае совпадения по фазе сигналов на обоих- входах фазового детектора 42 на его вы0 ходе формируется высокий уровень напряжения, а при несовпадении - низкий. При наличии на выходе фазового детектора 42 низкого уровня напряжения, на выходе инвертора 34 получают высокий уровень, который поступает на первый вход четвер5 того логического элемента 2И 38. На втором входе последнего также имеется высокий уровень напряжения, так как исполнительный механизм 18 находится в исходном положении, а выход датчика 21 исходного положения через третий логический элемент 2ИЛИ 45 соединен с вторым входом четвертого логического элемента 2И 38.
Высокий уровень с выхода четвертого логического элемента 2И 38 поступает на
5 первый вход седьмого логического элемента 2И 41 и далее на вход привода 11 установочного вращения и на S-входы четвертого и пятого триггеров 29 и 30, устанавливая их в единичное состояние. Высокий уровень на выходе триггера 30 через чет0 вертый логический элемент 2ИЛИ 46 дает команду приводу 20 подачи исполнительного механизма 18, представляющего собой, например гидроцилиндр с двумя золотниками для управления ходами «Вниз и «Вверх на перемещение вниз сверлильной
5 головки исполнительного механизма 18. Когда расстояние между сверлом и обрабатываемой поверхностью сокращается до нескольких миллиметров, с выхода датчика 22
зоны обработки на трнггера 30 поступает высокий уровень и устанавливает его в нулевое состояние, характеризующееся низким уровнем на выходе (триггер R-типа).
Низкий уровень напряжения через пятый логический элемент 2ИЛИ 46 поступает на второй вход привода 20 подачи исполнительного механизма и останавливает движение сверлильной головки. Одновременно с перемещением вниз сверлильной головки исполнительного механизма 18 начинает вращаться электродвигатель привода 11 установочного вращения, приводя во вращение коленчатый вал 12, металлический диск 13 с прорезью и датчик 14 углового положения. Фаза сигнала на выходе датчика 14 углового положения начинает изменяться (сельсин работает в фазо- вращательном режиме) и при совпадении с фазой сигнала запоминающего блока 4 угла, на выходе фазового детектора 42 появляется высокий уровень напряжения. При этом на выходе инвертора 34 появляется низкий уровень, который через четвертый и седьмой логические элементы 2И 38 и 41 останавливает вращение выходного вала привода 11, а на выходе логического элемента ЗИ 25 - высокий уровень, который поступает на второй вход четвертого логического элемента 2ИЛИ 46 и далее на второй вход привода 20 подачи исполнительного механизма. Сверлильная головка исполнительного механизма 18 продолжает перемещение вниз.
На выходе датчика 19 отсчета перемещений, в качестве которого может быть применен вращающийся трансформатор со схемой линеаризации выходного напряжения от угла поворота, начинает нарастать напряжение, которое, поступая на второй вход схемы 9 совпадения, сравнивается по величине с опорным напряжением сигнала дисбаланса, поступающим с выхода запоминающего блока 3 величины дисбаланса через первый аналоговый ключ 7, открытый высоким уровнем с инверсного выхода триггера 26.
При совпадении глубины сверления в противовесе коленчатого вала 12 с заданной в запоминающем блоке 3 величины дисбаланса схема 9 совпадения срабатывает. На ее выходе появляется высокий уровень, поступающий на S-вход триггера 27, высокий уровень на выходе которого дает команду приводу 20 подачи исполнительного механизма на движение головки вверх, и на второй вход пятого Логического элемента 2И 39. На первом входе последнего - высокий уровень с инверсного выхода триггера 26.
На выходе пятого логического элемен- 55 та 2И 39 появляется высокий уровень, который через второй логический элемент 2ИЛИ 44 дает команду в блок 23 управ0
5
0
5
5
0
5
0
5
0
ления об окончании коррекции коленчатого вала 12. Если ориентация вала 12 до совмещения места коррекции с осью исполнительного механизма 18 заканчивается рань- ще, чем подвод сверлильной головки к зоне обработки, то остановки движения испол- тельного механизма 18 при входе в зону обработки не будет, так как высокий уровень напряжения с выхода логического элемента ЗИ 25 поступает на второй вход четвертого логического элемента 2ИЛИ 46 и далее на второй вход привода 20 подачи исполнительного механизма 18.
Если начальный дисбаланс коленчатого вала попадает в зону, запрещенную для коррекции (ограниченную углом р), то сверление отверстия по координате X на определенную блоком 1 измерения глубину приводит к ошибке, пропорциональной sinV2. При угле р 5° ЭТО приводит к больщому проценту бракованных коленчатых валов после балансировки. Замена одного сверления по координате X двумя по обоим кординатам но на меньшую глубину (примерно 1/2W и зависит от угла р) приводит к ошибке, пропорциональной sin /4, т. е. уменьшает ошибки при коррекции в 2 раза.
Работа схемы при попадании W в зону, ограниченную углом р, следующая.
После ориентации коленчатого вала 12 по углу, соответствующему WH, прорезь на металлическом диске 13 совпадает с датчиком 17 ориентации по координате, и на его выходе получают низкий уровень напряжения, который поступает на первый вход логического элемента ЗИ 25 и запрещает даль- нейщий подвод сверлильной головки, остановленной по команде датчика 22 зоны обработки.
На выходе первого логического элемента 2ИЛИ 43 при наличии на обоих входах низких уровней появляется низкий уровень напряжения, который устанавливает в единичное состояние триггер 26. Высокий уровень с прямого выхода последнего поступает на первые входы второго и третьего логических элементов 2И 36 и 37 и включает второй аналоговый ключ 8, на входе которого аналоговый сигнал пропорционален W«x и Wuy (они равны между собой). При изменении фазы сигнала на входе фазового детектора 42 на его выходе появляется низкий уровень напряжения, а на первом входе четвертого логического элемента 2И 38 - высокий уровень.
Высокий уровень будет также и на зто- ром входе четвертого логического элемента 2И 38, который связан, с выходом четвертого триггера 29 через третий логический элемент 2ИЛИ 45. С выхода четвертого логического элемента 2И 38 высокий уровень напряжения поступает на первый вход седьмого логического элемента 2И 41 и разрешает вращбб ие электродвигателя привода 11. Фаза сигнала на выходе второго датчика 15 углового положения соответствует координате X, а третьего датчика 16 - координате Y.
При установке коленчатого вала 12 под координату X на выходе фазового детек- тора 42 появляется высокий уровень, который останавливает вращение коленчатого вала 12 и разрешает ход вниз исполнительного механизма 18 (по аналогии с указанным). После окончания сверления отвер- стия по координате X на глубину, соответ- CTByraiuyroW-x, и начала перемещения исполнительного механизма 18 вверх, отрицательный фронт импульса с выхода схемы 9 совпадения устанавливает триггер 28 в единичное состояние. Высокий уровень с прямо- го выхода последнего через третий логический элемент 2И 37 включает аналоговый ключ 33. Низкий уровень с инверсного выхода триггера 28 отключает аналоговый управляемый ключ 32.
Таким образом, к входу фазового детек- тора 42 вместо второго датчика 15 углового положения оказывается подключенным третий датчик 16 углового положения, и низкий уровень с выхода детектора 42 разре- щает установочное вращение коленчатого вала 12 после возвращения исполнительного механизма 18 в исходное положение. По аналогии с указанным после окончания сверления по координате Y на глубину W«y высокий уровень с выхода схемы 9 совпадения поступает на второй вход шестого ло- гического элемента 2И 40. с выхода которого через логический элемент 2ИЛИ 44 он поступает в блок 23 управления и дает команду об окончании коррекции дисбаланса, попавшего в запрещенную для коррекции зону.
Таким образом, за счет совмещения операций ориентации коленчатого вала и подвода исполнительного механизма к зоне обработки обеспечивается автоматизированный цикл коррекции дисбаланса, позволяющий сократить время коррекции и повы- сить производительность балансировки.
Формула изобретения
Устройство для коррекции дисбаланса коленчатого вала, содержащее блок измерения, соединенный с ним блок отсчета, блок коррекции, выполненный в виде привода установочного вращения, кинематически соединенного с коленчатым валом, металлического диска с прорезью, первого, второго и третьего датчиков углового положения, датчика ориентации по координате, исполнительного механизма, связанных с ним датчика отсчета перемещений, выход которого соединен с четвертым входом блока отсчета и привода подачи исполнительно- го механизма, датчика исходного положения, блок управления и блок формирования команд, выполненный в виде логического элемента 3 И, первый вход которого соединен с выходом датчика ориентации по координате, а третий вход - с выходом блока управления, трех триггеров, первого, второго и третьего аналоговых управляемых ключей, инвертора, семи логических элементов 2И, фазового детектора, первый вход которого соединен с выходом первого датчика углового положения, выход - с вторым входом логического элемента ЗИ и входом инвертора, а второй вход - с соединенными между собой выходами первого, второго и третьего аналоговых управляемых ключей и двух логических элементов 2ИЛИ, первый вход первого из которых соединен с первым входом логического элемента ЗИ, второй вход - с выходом инвертора и первым входом четвертого логического элемента 2И, а выход - со счетным входом первого триггера, прямой выход которого соединен с первыми входами второго и третьего логических элементов 2И и третьим входом блока отсчета, а инверсный выход - с первыми входами первого и пятого логических элементов 2И и вторым входом блока отсчета, первый вход второго логического элемента 2ИЛИ соединен с выходом пятого логического элемента 2И, второй вход - с выходом шестого логического элемента 2И, а выход - с входом блока управления, выход которого соединен с вторым входом первого логического элемента 2И и первым входом седьмого логического элемента 2И, S-вход второго триггера соединен с выходом блока отсчета, вторым входом пятого логического элемента 2И, первым входом шестого логического элемента 2И и счетным входом третьего триггера, R-вход второго триггера - с выходом датчика исходного положения а выход второго триггера - с первым входом привода подачи исполнительного механизма, прямой выход третьего триггера соединен с вторыми входами третьего и шестого логических элементов 2И, а инверсный выход - с вторым входом второго логического элемента 2И, выход четвертого логического элемента 2И соединен с вторым входом седьмого логического элемента 2И, выход которого соединен с входом привода установочного вращения, первые входы первого, второго и третьего аналоговых управляемых ключей соединены соответственно с вторым выходом блока измерения и выходами второго и третьего датчиков углового положения, а вторые входы - соответственно с выходами первого, второго, третьего логических элементов 2И, отличающееся тем, что, с целью повышения производительности за счет совмещения операций ориентации коленчатого вала и подвода исполнительного механизма к зоне обработки, оно снабжено датчиком зоны обработки, четвертым и пятым триггерами, S-входы которых соединены между собой и
с выходом седьмого логического элемента 2И, а R-входы - соответственно с выходами блока отсчета и датчика зоны обработки, и третьим и четвертым логическими элементами 2ИЛИ, первые входы которых соединены соответственно с выходами
четвертого и пятого триггеров, вторые входы - с выходами датчика исходного положения и логического элемента ЗИ, а выходы - с вторыми входами четвертого логического элемента 2И и привода подачи исполнительного механизма.
X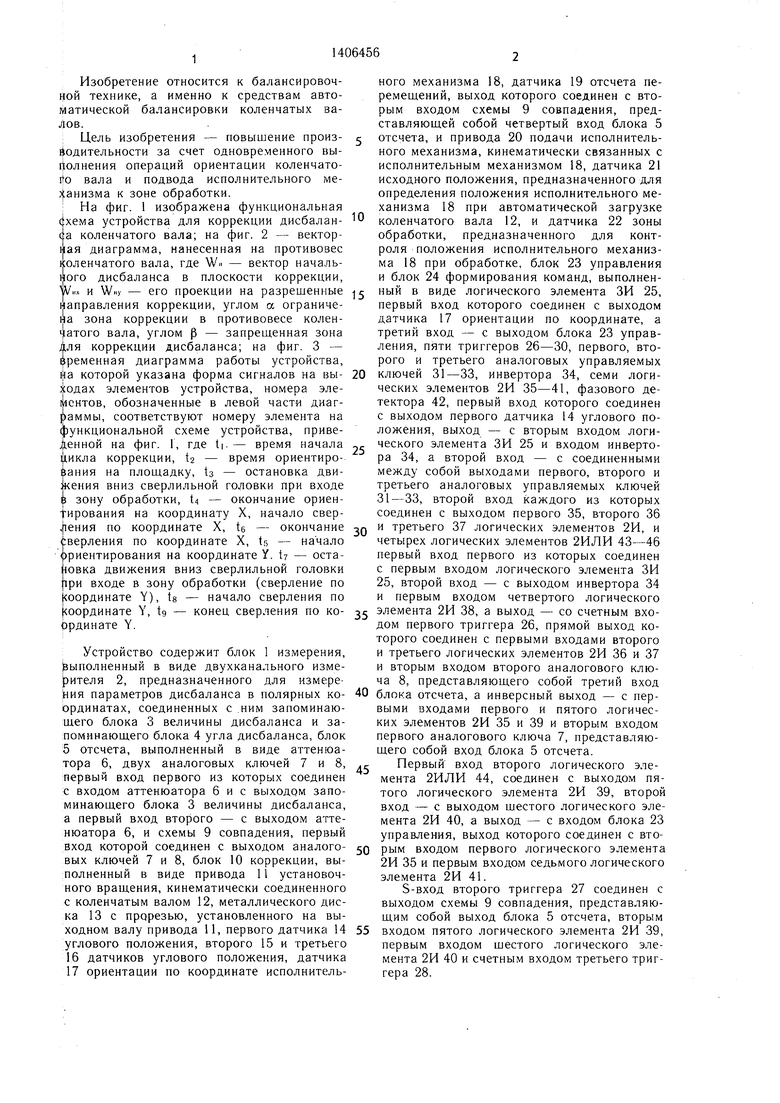
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для коррекции дисбаланса | 1985 |
|
SU1273758A1 |
| Измерительное устройство к балансировочному станку | 1984 |
|
SU1221516A1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1415092A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1146562A1 |
| Устройство для коррекции дисбаланса коленчатого вала | 1983 |
|
SU1101701A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1229620A2 |
| Устройство для коррекции дисбаланса коленчатого вала | 1982 |
|
SU1035439A1 |
| Измерительное устройство станка для балансировки коленчатых валов | 1990 |
|
SU1714401A1 |
| Измерительное устройство станка для балансировки коленчатых валов | 1986 |
|
SU1366893A1 |
| Балансировочное устройство | 1982 |
|
SU1054695A1 |
Изобретение относится к балансировочной технике. Цель изобретения - повышение производительности за счет одновременного выполнения операций установочного вращения и подачи исполнительного механизма в зоне обработки. Одновременно с вращением электродвигателя привода 11 установочного вращения исполнительный механизм 18 перемешается в зоне обработки коленчатого вала. Высокий уровень с выхода логического элемента 2И 38 поступает на первый вход логического элемента 2И 41, на вход привода 11 установочного вращения и на S-входы триггеров 29 и 30. Высокий уровень на выходе триггера 30 через логический элемент 2ИЛИ 46 дает команду приводу 20 подачи исполнительного механизма 18, когда расстояние между последним и обрабатываемой поверхностью сократится до нескольких миллиметров, с выхода датчика 22 зоны обработки на R-вход триггера 30 поступит высокий уровень и установит его в нулевое состоя- ние, характеризующееся низким уровнем jg на его выходе, который через логический элемент 2ИЛИ 46 связан с вторым входом fO привода 20 подачи исполнительного механизма 18, движение которого при этом прекращается. 3 ил.
Н
Фае. 2
| Основы балансировочной техники | |||
| Под ред | |||
| В | |||
| А | |||
| Щепетильникова, М.: Машиностроение, 1975, ч | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для выпуска сточных вод в реки | 1923 |
|
SU572A1 |
| Устройство для коррекции дисбаланса коленчатого вала | 1983 |
|
SU1101701A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
