t
и
ua
00 О5 О5 СО
ел
4
25
30
Изобретение относится к электротехнике,, а именно к системам управления частотно-регулируемых асинхронных электроприводов, и может быть исполь- зовано для получения информации обратной связи о составляющих обобщенного вектора напряжения асинхронного двигателя.
Целью изобретения является повыше- 10 ние точности и надежности работы.
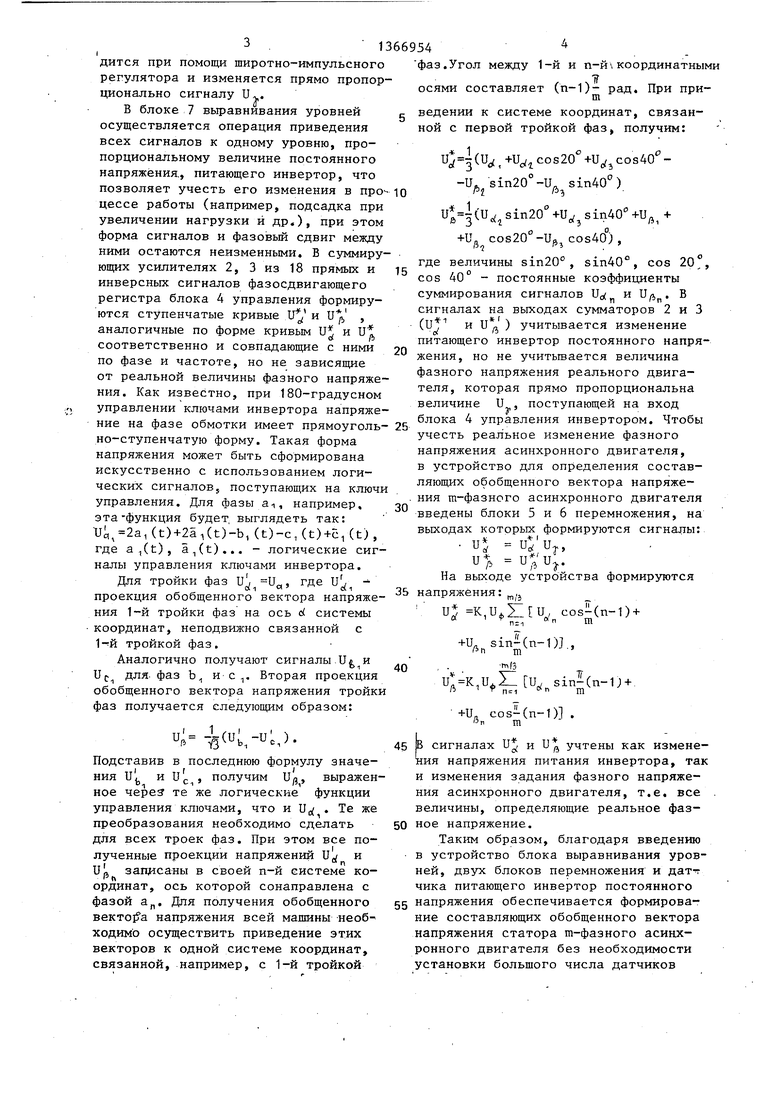
На фиг.1 представлена функциональная схема устройства для определения составляющих обобщенного вектора.напряжения т-фазного асинхронного двига- 15 теля} на фиг.2 - пример выполнения блока выравнивания уровней.
Устройство для определения составляющих обощенного вектора напряжения статора т-фазного асинхронного двига- 20 теля, например девятифазного, подключенного к выходам т-фазного инвертора, содержит датчик 1 напряжения (фиг.1 ,и два суммирующих усилителя 2, 3. -Блок 4 управления инвертором выполнен с входами задания напряжения и частоты и 2т выходами. В устройство введены два блока 5, 6 перемножения и блок 7 выравнивания уровней с (2т+1) входами и 2ш выходами. Датчик,1 нап- ряжения выполнен в виде датчика постоянного напряжения, предназначенного для подключения к шинам инвертора, а каждьш из суммирующих усилителей .2, 3 снабжен 2т входами. При этом 2т . входов блока 7 выравнивания уровней предназначены для подключения к соответствующим выходам блока 4 управления инвертором, (2т+1)-й вход блока 7 выравнивания уровней подключен к выходу датчика 1 напряжения.
2т входов суммирующих усилителей 2, 3 попарно объединены между собой и подключены к .соответствующим выходам блока 7 выравнивания уровней. Выходы суммирующих усилителей 2, 3 подключены к первым входам первого и второго соответственно блоков 5, 6 перемножения, вторые входы которых предназначены для подключения к входу задания напряжения блока 4 управления инвертором. Выходы блоков 5, 6 переножения образуют выходы устройства ля определения составляющих обобщеного вектора напряжения статорага- азного -асинхронного двигателя.
Устройство может быть использовано системах частотного управления многофазными асинхронными двигателями.
35
40
45
50
55
5
0
5
0
5
0
фазные обмотки которых объединены в
-трехфазных систем, которые сдвинуты
одна относительно другой на угол -.
Блок 4 управления инвертором содержит на выходе фазосдвигающий регистр, в данном случае с 18 выходами.
Блок 7 выравнивания уровней содержит источник 8 опорного напряжения (фиг.2), выполненный на основе микросхемы 9 и транзистора 10, и диодно- резисторные делители 11-28, подключенные к выходу источника В опорного напряжения.
Суммирующие усилители 2,3 выполняют, например, на основе операционных усилителей, датчик 1 напряжения - по схеме измерительного усилителя с гальванической развязкой, блоки 5, 6 перемножения - по схеме двухквадратного перемножителя сиг налов с высокой линейностью и компенсацией- температурного дрейфа.
Устройство для опредения составляющих обобщенного вектора напряжения статора асинхронного двигателя работает следующим образом,
В фазосдвигающем регистре блока 4 управления инвертором формируются сигналы управления силовыми ключами многофазного инвертора напряжения (в рассматриваемом примере - девятифазного) . При этом сигналы а, Ь, а, Ь,, а, bj, Cj управляют катодной группой ключей инвертора, а инверсные им сигналы а, Ь,, с,; i,j, b, с,; Sj, 5, Cj - анодной. Фазовьй сдвиг между сигналами следующий: между сигналами, имеющими одинаковое буквенное обозначение (например, между сигналами а,, aj, аз), фа-
зовьй сдвиг
т
составляет Q,
т. е-.
20 ед. град., а между сигналами, имеющими разное буквенное обозначение, но одинаковые индексы (например, а,, Ь-,, с,), фазовый сдвиг составляет 120 эл. град. Все сигналы на выходе блока 4 управления имеют прямоугольную форму с коэффициентом заполнения периода ,5 т.е. осуществляется 180-градусное управление ключами инвертора. Частота выходных сигналов определяется напряжением U и изменяется от О До максимальной частоты пи- тающего двигатель напряжения прямо пропорционально напряжению Uj , Регулирование фазного напряжения произво . 1
дится при помощи широтно-импульсного регулятора и изменяется прямо пропорционально сигналу и..
В блоке 7 вьфавнивания уровней осуществляется операция приведения всех сигналов к одному уровню, пропорциональному величине постоянного напряжения., питающего инвертор, что позволяет учесть его изменения в про цессе работы (например, подсадка при увеличении нагрузки и др.), при этом форма сигналов и фазовый сдвиг между ними остаются неизменными. Б суммиру ющих усилителях 2, 3 из 18 прямых и инверсных сигналов фазосдвигающего регистра блока 4 управления формируются ступенчатые кривые и , аналогичные по форме кривым U и Ut
б 1Ь
соответственно и совпадающие с ними по фазе и частоте, но не зависящие от реальной величины фазного напряжения. Как известно, при 180-градусном управлении ключами инвертора напряжение на фазе обмотки имеет прямоуголь но-ступенчатую форму. Такая форма напряжения может быть сформирована искусственно с использованием логи
и:
и
. иУи ul u
управления. Для фазы а, например. зо эта функция будет, выглядеть так: Ul,,2a, (t)+2ai(t)-b, (t)-c, (t)+c, (t) , где a,(t), a,(t)... - логические сигналы управления ключами инвертора.
Для тройки фаз и Ug, где U
проекция обобщенного вектора напряже- напряжения: ния 1-й тройки фаз на ось d системы координат, неподвижно связанной с Ни тройкой фаз.
Аналогично получают сигналы
питающего инвертор постоянно жения, но не учитьгоается вел фазного напряжения реального теля, которая прямо пропорци величине U , поступающей на блока 4 управления инверторо учесть реальное изменение фа напряжения асинхронного двиг в устройство для определения ляющих обобщенного вектора н ния т-фазного асинхронного д введены блоки 5 и 6 перемнож
выходах которых формируются
Г
/Ь - и и.
На выходе устройства форм
и K,U, cos4n-1)
+U sin(n-1)..
/in
m
nif3
Uc, для. фаз b, и с,. Вторая проекция ,U.U, sin(n-1J + обпбшенного вектова напояжения твойки г m
обобщенного вектора напряжения тройки фаз получается следующим образом:
-V.,).,,
Подставив в последнюю формулу значения и и ,, получим и,з, выраженное через те же логические функции управления ключами, что и U . Те же преобразования необходимо сделать для всех троек фаз. При этом все полученные проекции напряжений и„( и Up защ1саны в своей п-й системе координат, ось которой сонаправлена с фазой а. Дпя получения обобщенного BeKTOiJa напряжения всей малшны необ-- ходимо осуществить приведение этих векторов к одной системе координат, связанной, например, с 1-й тройкой
+U,, cos-(n-1)l . m
р сигналах Uj и U учтены ка ния напряжения питания инвер и изменения задания фазного ния асинхронного двигателя, величины, определяющие реаль
50
ное напряжение.
Таким образом, благодаря в устройство блока выравнива ней, двух блоков перемножени чика питающего инвертор пост 55 напряжения обеспечивается фо ние составляющих обобщенного напряжения статора т-фазного ронного двигателя без необхо установки большого числа дат
фаз.Угол между 1-й и п-й координатным
осями составляет (п-1)- рад. При приm
ведении к системе координат, связанной с первой тройкой фаз, получим:
l, -и,, sin20°-U sin40 )
(U sin20 +U ,+ +U 00820 -U j со840°) ,
где величины sin20 , sin40°, cos 20 cos 40° - постоянные коэффициенты
суммирования сигналов Uo( и U. В сигналах на выходах сумматоров 2 и
(и -
0(
и и д ) учитывается изменение
д
и:
и
. иУи ul u
питающего инвертор постоянного напряжения, но не учитьгоается величина фазного напряжения реального двигателя, которая прямо пропорциональна величине U , поступающей на вход блока 4 управления инвертором. Чтобы учесть реальное изменение фазного напряжения асинхронного двигателя, в устройство для определения составляющих обобщенного вектора напряжения т-фазного асинхронного двигателя введены блоки 5 и 6 перемножения, на
выходах которых формируются сигналы:
Г
/Ь - и и.
На выходе устройства формируются
яжения:
и K,U, cos4n-1) +
ения:
+U sin(n-1)..
/in
m
nif3
K,U.U, sin г m
+U,, cos-(n-1)l . m
р сигналах Uj и U учтены как изменения напряжения питания инвертора, так и изменения задания фазного напряжения асинхронного двигателя, т.е. все величины, определяющие реальное фаз50
ное напряжение.
Таким образом, благодаря введению в устройство блока выравнивания уровней, двух блоков перемножения и дат чика питающего инвертор постоянного 55 напряжения обеспечивается формирование составляющих обобщенного вектора напряжения статора т-фазного асинхронного двигателя без необходимости установки большого числа датчиков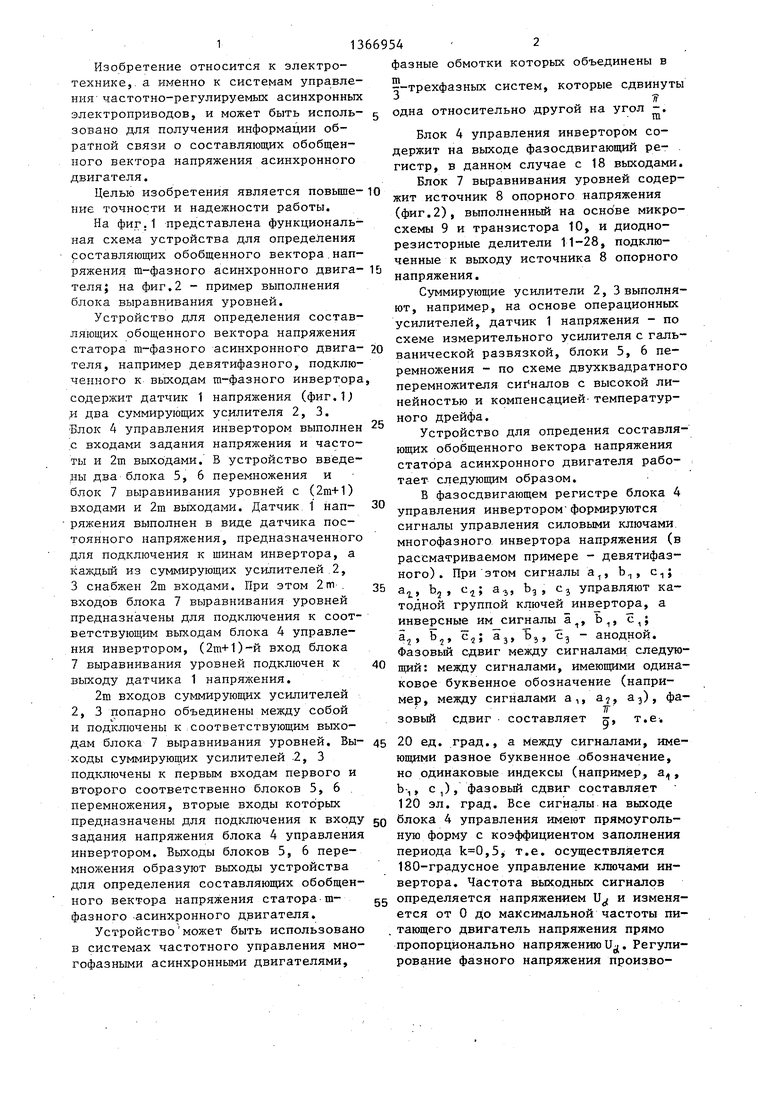
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения электромагнитного момента асинхронного двигателя | 1982 |
|
SU1053254A1 |
| Устройство для определения проекций обобщенного вектора напряжения статора @ -фазного асинхронного двигателя | 1987 |
|
SU1458834A1 |
| Электропривод переменного тока | 1985 |
|
SU1352605A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1995 |
|
RU2101846C1 |
| Электропривод переменного тока | 1979 |
|
SU928584A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1987 |
|
SU1534736A1 |
| Электропривод | 1985 |
|
SU1309244A1 |
| СПОСОБ ОПТИМАЛЬНОГО ВЕКТОРНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402147C1 |
| Устройство для измерения скольженияАСиНХРОННОгО дВигАТЕля | 1979 |
|
SU817880A1 |
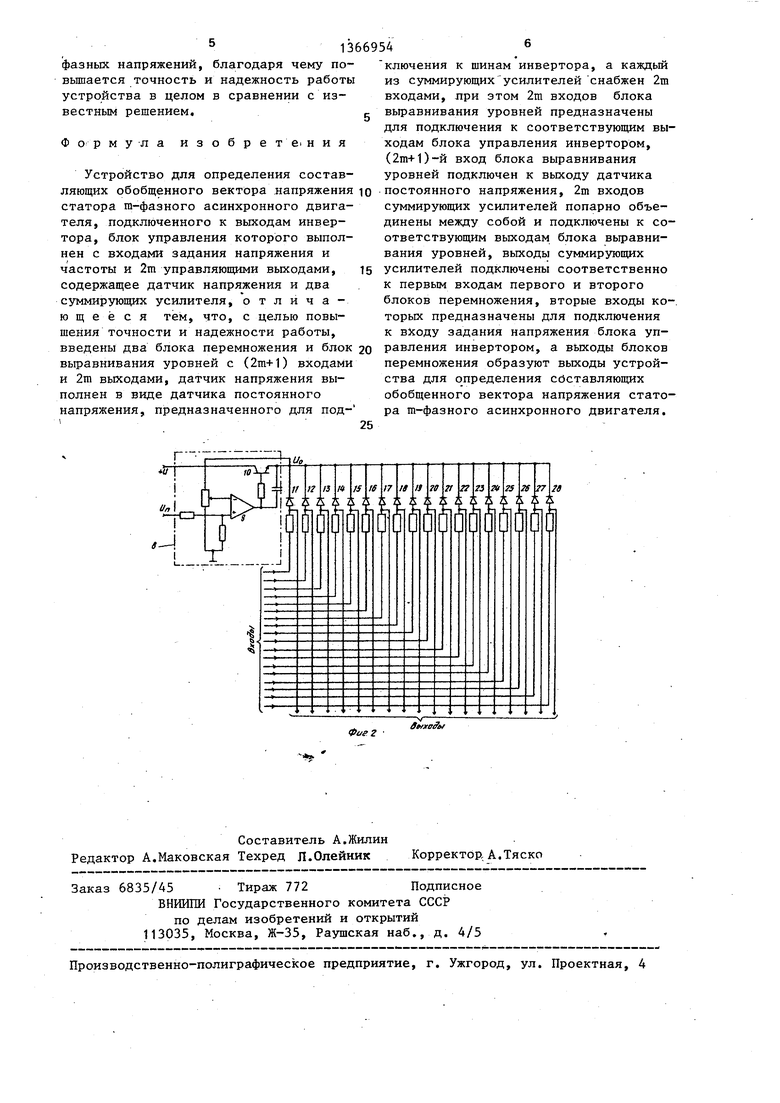
Изобретение относится к электротехнике и может быть использовано в системах регулирования частоты вращения асинхронного двигателя. Целью изобретения является повьшение точности и надежности работы. Указанная цель достигается введением в устройство для определения составляющих обобщенного вектора напряжения статора т-фазного асинхронного двигателя блоков 5,6 перемножения и блока 7 выравнивания уровней. Датчик 1 напряжения установлен в цепи питания инвертора асинхронного двигателя. Входы блока 7 служат для подключения к соответствующим выходам блока 4 управления инвертором. В результате обеспечивается формирование составля-. ющих обобщенного вектора напряжений статора т-фазного асинхронного двигателя в отсутствие датчиков фазных напряжений. 2 ил. с SS (Л
Фиг г
effxefftf
| СПОСОБ ФОРМИРОВАНИЯ МНОГОФАЗНОЙ СИСТЕМЫ ЧАСТОТНОРЕГУЛИРУЕМЫХ СТУПЕНЧАТО- СИНУСОИДАЛЬНЫХ НАПРЯЖЕНИЙ | 0 |
|
SU388344A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для определения электромагнитного момента асинхронного двигателя | 1982 |
|
SU1053254A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| « ... | |||
