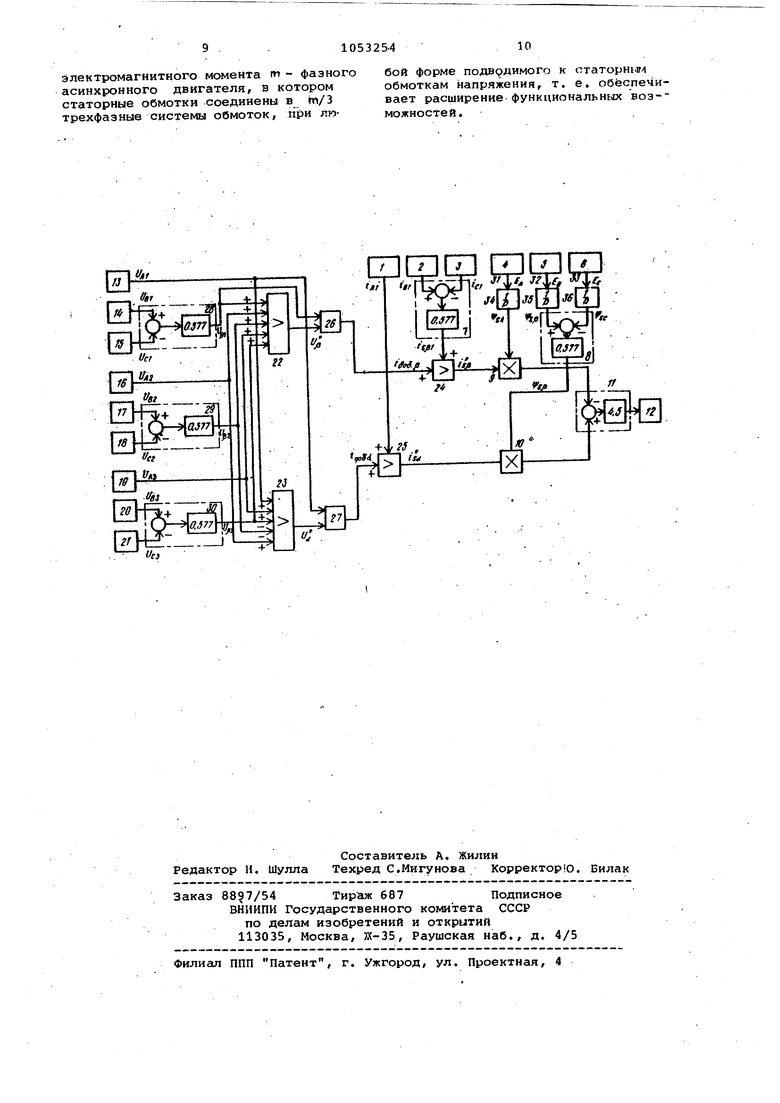
Изобретение относится к электротехнике, а именно к частотно.управляемым acKHxpoHMbn- электроприводам, и может быть .использовано в системах управления электроприводов с применением обратной связи по электромаг нитному моменту для определения электромагнитного момента асинхрон ного двигателя косвенным методом. Известно-устройство для определе ния электромагнитного момента асинхронного двигателя, содержащее датчики фазных токов и напряжений, выходы которых подключены к вычисли те лю потокосцепления, умножителя и сумматор. Выходы вычислителя потоко сцепленияи выходы датчиков фазньлх токов связаны с входами .умножителей соединенных выходами с входами сум; матора, выход которого образует выход устройства, для-определения электромагнитного момента С13. Недостатком устройства являются ограниченные функциональные возможности , так как оно не обеспечивает определение электромагнитного момен та т- фазного асинхронного двига-теля. Решение задачи по определению - электромагнитного момента m -фазног .асинхронного двигателя ( m -число,, большее и кратное трем):связано с использованием т/3 устройств, выхо ные сигналы которых суммируются, что конструктивно сложно.. в устройстве определение электро магнитногомомента асинхронного двигателя производится по- выражению ( sot /3s- sp ois) где MjgL fj.$ - проекции обобщенных векторов потокосцепления и тока статора на ось сИ неподвижной относитель но статора.декартовой системы координат; Vf/b и - проекции указанных величин на ось /J. ьыражение (1 справедливо лишь в случае сииусо и даль ной формы токов в статррннх об-: мотках двигателя, .Однако одна из сторон целесообраз ности применения m - фазных асинхрон ных двигателей (т 73 ) в -приводах переменного тока заключается в том, что они имеют улучшенную форму поля в воздушном зазоре двигателя, что приводит к уменьшению паразитных мом.ентов этого двигателя. Вследствие этого даже при широких диапазонах регулирования скорости двигателя нет необходимости, как это имеет место в электроприводах с З-фазньми двига:телями, форг-Йровать токи фаз по сину соидальному закону. Это приводит к значительному упрощению системы управления преобразователем частоты и привода в делом. Поэтому в tti-фаз ных приводах переменного тока (т 3) приходится иметь дело с сугубо несинусоидальными фаанм и токами, а следовательно определение электромагнитного момента по выражению (1 ) производится с погрешностями. Наиболее близким к изобретению по технической сущности является устройство для определения .электромагнитного момента асинхронного двигателя, содержащее д атчики фазных токов и потоков в трехфазной системе обмоток статора, при этом выходы датчиков фазных токов второй и третьей фаз соединены с входами первр.го сумматора, выходы датчиков фазных потоков второй и. третьей фаз соединены -: с входами второго сумматора, выход датчика ф-азного тока первой фазы и Выход первого сумматора связаны соответственно с первыми входами второго и -первого умножителей, выход датчика фазного,потока первой фазы и выход второго сумматора соединены. Соо.тветственно с втррыми входами первого и второго умножителей, выходы которых через третий сумматор подключены к ВХОДУ сглаживающего фильтра, выход которого образует выход устройства для определения электромагнитного момента асинхронного двигателя С2 J. Недостатком известного устройства являются ограниченные функциональные возможности., так как оно не обеспечивает определение электромагнитного момента т- фазного асинхронного дви.гателя. Определение электромагнитного момента т- фазного асинхронного двигателя может быть обеспечено при испольэован ии т/3 устройств, выход ные сигналы которых суммируются, что конструктивно сложно. Кроме того, в известном устройстве также реализовано выражение (1), справедливое для синусоидальной формы токов в статорных обмотках двигателя. При несинусоидальной форме токов определение электромагнитного момента .Фазного асинхронного двигателя с-помощью устройства производится с погрешностью. Целью изобретения является расширение функциональных возможностей устройства для определения электромагнитного момента асинхронного двигателя путем обеспечения возможности определения электромагнитного момента fn -фазного асинхронного двигателя { m - число, большее и кратное трем), и котором статорные обмотки соединены в т/З трехфазные системы обмоток. Указанная цель достигается тем, что. в устройство для определения ;электромагнитного. момента асинхронного двигателя, содержащее датчики фазйых токов и потоков в трехфазной системе обмоток статора, при этом выходы датчиков фазных токов второй и третьей фаз соединены с входами сумматора, выходы датчиков фазных потоков второй и третьей фаз соединены с входами второго сумматора; выход датчика фазного тока перво фазы и выход первого сумматора свяэа ны соответственно с первьоми входами второго и первого умнаж11телей., выход датчика фазного потока первой фазы и выход второго сумматора соединены соответственно с вторыми входами пер рого и второго умножителей, выходы которых через третий сумматор подклю чены к входу сглаживающего фильтра, выход которого образует выход устройства для определения электромаг нитиого момента асинхронного двига-. теля, введены m датчиков фазных нап ряжений, четыре суммирующих усилителя, два апериодических-звена и дополнительнее сумматоры по числу трёхфазных систем обмоток, входы каждого из которых подключены к выходам датчиков фазных напряжений второй и третьей фаз каясдой трехфазйой-системы обмоток, а выходы дополнительных сумматоров соединены с входами первого суммирующего усили теля, другие входы которого соединен с выходами датчиков фазных напряжеНИИ первых фаз всех трехфазных систем обмоток, кроме первой, при этом ВХОДЫвторого суммирующего усилите ля соединены с эыходами датчиков фазных напряжений первых фаз всех трехфазных систем обмоток, а также с выходами дрполнительных сумматоров в трехфазных системах обмоток, кроме первой, выход первого суммирующего, усилителя через первое апериодическое звено подключен к входу третьего суммирующего усилителя, другой вход которого соединен с-выходом первого суМматора, а выход - с первым входом первого умножителя, выход второго суммирующего усилителя через второе апериодическое звено подключен к входу четвертого С5 «1мирующего усили теля, другой вход которого соединенс выходом датчика фазного тока первой фазы а выход - с первым входом второго умножителя, вторые входы первого и второго апериодических звеньев соединены соответственно с выходом дополнительного сумматора и. с выходом датчика фазного напряженяя первой фазы в первой трехфазной сие темеобмоток. . На чертеже представлена структурная схема устройства для определения электромагнитного момента на примере 9-фазного асинхронного двигателя (т 9 ), в котором статорныё обмотки соединены в три |Трехфазн.че.системы обмоток (одноименн 1е обмотки трехфазных систем обмоток расположены в расточке магнитопровода двигателя со сдвигом друг относительно друга на jt/9 эл. град). Устройство для определения электромагнитного двигателя содержит датчики 1 - 3 фазных токов и датчики 4-6 фазных потоков в первой системе обмоток статора. Выходы датчиков 2 и 3 фазных токов второй и третьей фаз соединены с входами первого сумматора 7, выходы датчиков 5 и G фазных потоков второй и третьей фаз соединены с входами второго сумг- атора 8. Выход датчика 1 фазного тока первой фазы и выход первого сумматора 7 связаны соответственнос первыми входами второго и первого умножителей 9 и 10. Выход датчика 4 фазного потока первой фазы и выход второго суммато-. ра 8 соединены соответственно с вторыми входами первого и второго умножителей 9 и 1о,. выходы которых через третий сумматор 11 подключены к входу сглаживающего фильтра 12, выход которого образует выход устройства. В устройство для определения электромагнитного момента fn -фазного асинхронного двигателя введены девять датчиков 13 - 21 фазных напряжений по числу фаз асинхронного двигателя, суммирующие усилители 22 - 25, апериодические звенья 26 И 27 и дополнительные сумматоры 28 - 30 ПОчислу трехфазных систем обмоток, равному трем, в устройстве, Входь дополнительного сумматора 2ti. подключены к выходам датчиков 14 и 15 фазных напряжений второй и третьей фаз первой трехфазной системы обмоток. Входы дополнительного сумматора 29 подключены к выходам датчиков 17 и 18 фазных напряжений второй и третьей фаз второй трехфазной системы Гобмоток. Входы дополнительного суммаTopa 30 подключены,к выходам датчиков 2Си 21 фазных напряже НИИ, второй и третьей фаз трехфазной системы )тoк.Выходы дополнительных сумматоров 28-30 соединены с входами первого суммирующего усилителя 22,другие входа которого соединены с выходами датчиков фазных напряжений 16 и 19 первых фаз всех трехфазных систем обмоток, кроме первой. Входы второго.суммирующего усилителя 23 соединены с выходами датчиков 13, 16 и 19 фазных напряжений первых фаз всех трехф азных систем рбмрток, а также с выходами дополнительных сумматоров 29 и 30 в трехфазных системах обмоток, кроме первой, Выход первого суммирующего усилителя 22 через Первое апериодическое звено 26 подключен к входу тре -тьего суммирующего усилителя 24,другой вход которого соединен с выходом первого сумматора 7., а выход с первым входом первого умножителя 9. Выход второго суммирующего усилителя 23 через второе апериодическое звено 27 подключен к входу четвертого суммирующего усилителя 25, другой вход которого сединен с выходом датчика 1 фазного тока первой фазы, а выход - с первым входом второго умножителя 10. Вторые входы первого и второго апериодических звеньев 26 и 27 соеди нены соответственно с выходом дополнительного сумматора 28 и с выходом дат чика фазного напряжения 13 первой фазы в первой трехфазной системе обмоток. Каждый из датчиков 4-6 фазных потоков составлен из соответствующей фазной измерительной катушки 31 - 33 измеряющий фазную ЭДС, к выходу кото рой подключен один из интеграторов 34 - 36. . Устройство для определения электромагнитного момента м -фазного асинхронного двигателя работает еледующим образом. Определяют обобщенный вектор суммарного тока статора.,- необходимый для косвенного измерения .электромагнитного момента m -фазного двигателя статорные обмотки которого соединены в rVi/3 трехфазные системы обмоток. При этом измеряют обобщённый вектор напряжения и обобщенный --вектор тока одной 3-фазной системы рбмоток статора, определяют такж-е обобщенный вектор суммарного напряжения статора Сигналы, пропорциональные обобщенным векторам напряжения одной тройки фаз и суммарного напряжения статора, сравнивают, результат сравнения пода ют на функциональный элементв виде апериодического звена, моделирующий статорную обмотку- m - фазной машины, и- полученным в результате этого вектором токовой добавки корректирутот измеренный обобщенный вектор тока одной 3-фазной системы. При .этом информацию об обобщенном векторе потокосцепления статора снимают с по мощью датчиков потока (например, с помощью измерительных катушек с интеграторами или датчиков Холла), расположенных на статоре в воздушном зазоре машины соответственно осям . фазных обмоток той же тройки фаз. В устройстве реализуют следующие отношения .,0 5о6--тЬтК- -(ос)5Ы. (2) :К-%| f. rJUflf 3 -т sp -soC s/s) w 2 V-9oC --- где 31, M , 3g Id. -t oC и 5,- проекции на ось ot неподвижной относительно статора системы декартовых координаТ связанной с осями первой., базовой тройки фаз,соответственно обобщенных векторов суммарного тока статора, i суммарного напряжения статора. напряжения и тока пер)зой, базоьой, трехфазнойс 1стеми, потокгтсцепления статора; J, О , , 3 иУ -соSP р ip-s-ffb ответственно, проекции на ось системы координат указанных векторов; Rg И Т - параметры статорной обмотки m - фазного двигателя; Mj -электро агнитный момент .т -фазной машины. Принципиально обобщенный вектор суммарного тока статора Ы-фазного двигателя, необходимый для определения электромагнитного момента последнего, получают как некоторую геометрическую сумму обобщенных векторов тока i-ых троек фаз, для чего измеряют фазные токи во всех т/3 трехфазных системах. Однако это приводит к значительному усложнению устройства за счет введения в него блоков гальванической развязки, а также к существенному снижению точности результата измерения. В этой связи получение обобщенного . вектора суммарного тока статора с помощью операций (2) - (4) значительно проще И точнее, так как необходимую информацию о фазных напряжениях получают из схемы управления инвертором... На выходах измерительных катушек 31 - 33, расположенных по окружности статора в воздушном зазоре машины соответственно осям фазных обмоток А1, В1 :и С1 первой., базовой тройки фаз, индуктируются сигналы, пропорциональные производным от потоков, сцепленных с данными катушками. После интегрирования этих, сигналов с помощью интеграторов 34 - 36 на выходах последних получаем сигналы SA пропорциональные соответствующим потокосцеплениям по осям А1, в1.и С1, Сигналы Чд-и f с выходов интеграторов 35 и 36 подаются на суммирующий усилитель 8, на выходе которого образуется сигнал ,& ( выходов датчиков напря жени1Г14 и 15, 17 и 18, 20 .и 21, установленных соответственно в фазах В1 и С1, В2 и С2, ВЗ и СЗ статорной обмотки снимаются сигналы Ug и L/c-i / :U ц 2 cz и рз пропорциойальные величин ам напряжений -в соответствующих фазах машины и подаются на входы суммирующих усилителей соответственно 28 - 30, на выходе которых образуются сигналы (J а J- х ftl ТТ ),()- pз fгKз- ca) с выходов датчиков 13, 16 и 19 напряжений установленных соответственно в фазах А1, А2 и A3 статорной обмотки, снимаются сигналы U , U АЪ пропорциональные соответствующим фазным напряжениям. Эти сигналы, а также сигналы вь- выходов суммирующих усилителей 29 и 30j суммируются с соответствующими коэффици ентами в суммирующем усилителе 23, на выходе которого образуется-сигнал Uji , равный l4(.,2л Г Сигналы UA 2 и выходов сумми алы рующих усилителей 2 30, а также их сигналы выходов датчиков 16 и 19 напряжений суммируются с соответствующими коэффициентами в суммирующем усилителе 22, на выходе (которого.образуется сигнал lit t раввый . . ;-К, р5«4 « и ) 9 ЛЭ/ Сигнал Ui с выхода суммирующего ,усилителя 23, пропорциональный величине проекции обобщенного вектора суммар ного напряжения статора на ось ot декартовой системы координат, жестко связанной с осями фазных обмоток пер вой,, базовой тройки фаз и сигнал Идj с выхода датчика напряжения 13, про порциональный величине проекции на же ось обобщенного вектора напряжени первой, базовой тройки фаз, .подаются на входы апериодического звена 27, на выходе которого образуется сигнал добЫ равный. . . Зл,,) (. Сигнал Uji с выхода суммирующего уси лителя 22, пропорциональный величине проекции обобщенного вектора суммарного напряжения на ось р указанной системы координат, и сигнал с выхода суммирующего усилителя 28, .пропорциональный величине проекции на аналогичную ОСЬ обобщенного векто ра напряжения первой, базовой тройки фаз,, подаются на входы апериодическогЬ звена 26, на выходе которого образуется сигнал oSf, / равный . V6ri7 K-V)Сигнал Здобобс выхода апериодического звена 27 и выходной сигнал датчика тока J,установленного в фазе Al , базовой тройки фаз , суммируются в суммирующем усилителе 25 на выходе которого образуется сигнал Ь ,, пропорциональный величине проекции на ось об указанной системы координат обобщенного вектора суммарного тока статора. Выходные сигналы датчиков 2 М-З тока, установленных соответственно в фазах В1 и С1 первой, базовой тройки фаз, Л е-, и Л. подаются на входы суммирующего усилителя 7, на выходе которого образуется сигнал .5fSl 7 равный 5plTT((5 Этот .сигнал и сигнал oS с выхода апериодического звена 26 суг.1мируются в суммирующем усилителе 24, на выходе которого получаем сигнал JgA пропорциональный величине проекции на ось /Ь-указанной системы координат обобщенного вектора суммарного тока статора. ;Сигналы э| соответственно с выходов интегратора 34 и сумматора .24 перемножаются в умножителе 9, а сигналы р,я «cv соответственно с выходов сумматора 8 и суммирующего усилителя 25 перемножаются и умножителе 10. Выходныесигналы умножителей 9 и 10 подаются на сумматор 11, выходной сигнал которого ,равный величийё (Vg э| - 5 Л поступает на фильтр 12 На выходе последнего получаем .сглаженный сигнал, пропорциональный величине гэлектромагнитногс момента 9-фазного двигателя со знаком минус. По аналогии с устройством для вычисления электромагнитного момента 9-фазной Машины может быть составлена схема устройства для вычисления электромагнитного моментадвигателя с. любым числом фаз m (m - число, кратное 3). при этом на выходах суммирующих усилителей 23 и 22 необходимо сформировать сигНсшы соответственно Мке , О - J |Ь М ftl а коэффициент усиления сумматора 11 должен быть принят равным Ш. ( здесь 0 - обобщенный вектор напряжения 1-ой тройки фаз статора). С помощью предлагаемого устройства можнр определить и электромагнитный момент обычного 3-фазного электродвигателя. При этом измеренные обобщенные вектора напряжения и тока 3фазной системы обмоток тождественны обобщенным векторам соответственно суммарного напряжения и суммарного тока статора, а вектор токовой добавки равен нулю. Таким образом, введение в устройство Для определения электромагнитного момента асинхронного двигателя датчиков фазных напряжений, суммирующих, усилителей, апериодических звеньев обеспечивает реиюние задачи по определению с высокой точностью алектромагнитного момента m - фазного асинхронного двигателя, в котором статорные обмотки соединены в т/3 трехфазные системы обмоток, при любой форме подврдимого к статорныг обмоткам напряжения, т. а. обеспечивает расширение функциональн1 1х возможностей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения составляющих обобщенного вектора напряжения статора @ -фазного асинхронного двигателя | 1986 |
|
SU1366954A1 |
| Электропривод переменного тока | 1985 |
|
SU1352605A1 |
| Устройство для определения проекций обобщенного вектора напряжения статора @ -фазного асинхронного двигателя | 1987 |
|
SU1458834A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1995 |
|
RU2101846C1 |
| Электропривод | 1985 |
|
SU1309244A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1982 |
|
SU1039011A1 |
| Электропривод | 1986 |
|
SU1372580A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1987 |
|
SU1534736A1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |
yCTPOffCTBO ДЛЯ ОПРЕДЕЛЕНИЯ . ЭЛЕКТРОМАГНИТНОГО МОМЕНТА АСИНХРОННОГО ДВИГАТЕЛЯ, содержащее датчики фазных токов и потоков в трехфазной системе обмоток статора,.при этом датчиков фазных . токов второй .и третьей фаз соединены с входами первого сумматора, выходы датчиков фазных потоков второй и третьей фаз соединены с входами второго сумматора, выход датчика фазного тока первой фазы и выход первого сумматора связаны соответственно с первыми входами вто рого и первого умножителей выход . . датчика фазного потока первой фазы и выход второго сумматора соединены соответственно с вторыми входами первого и второго умножителей, выходы которых через третий сумматор подклю- чены к входу сглаживающего фильтра, выход которого образует выход.устройства для определения электромагнитного момента асинхронного двигатели, о т л и ч а ю .щ е е с я тем, что, с целью расширения функциональных воз-- можностей путем обеспечения возмоЛ ности определения электромагнитного момента rrj- фазного асинхронного , двигателя ( п - число, большее и кратное трем), в котором статорные обмотки соединены в т/3 трехфазные cиcтe /Iы обмоток, введены m датчиков фазных напряжений, четыре суммирующих усилителя, два апериодических звена и дополнительные сумматоры по числу трехфазных систем обмоток, входы каждого из которых подключены к выходам датчиков фазных напряжений второй-и третьей фаз каждой трехфазной системы обмоток, а выходы дополнительных сумматоров соединены с вхо Дсми первого суммирующего усилителя, другие входы которого соединены с выходами датчиков -фазньох напряжений первых фаз всех трехфазных систем обмоток кроме первой при этом входы второго cyм иpyющeгo усилителя (Л соединены с. выходами датчиков фазных напряжений первых Фаз всех трехфазных систем обмоток J-. а также с выходами дополнительных сумматоров в трехфазных системах обмоток, кроме первой, выход первого cy миpyющeгo усилителя через первое апериодическое звено подключен к входу третьего су1 мирую1дего усилителя, другой вход СП которого соединен с выходом первого оо ю сумматора, а выход - с.первым входом первого умножителя, вьзход второго суммирующего усилителя через второе ел 4 апериодическое звено подключен к входу четвертого суммирующего усилителя, другой вход которого соединен с выходами датчика фазного тока первой фазыjа выход.- с первым входом второго умножителя,. вторые входы первого и второго апериодических звеньев соединены Соответственно с выходом дополнительного сумматора и с выходом :датчика фазного напряжения первой фазы в первой трехфазной системе обмоток .
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3593083, кл | |||
| Способ изготовления фасонных резцов для зуборезных фрез | 1921 |
|
SU318A1 |
| Allan B.PIuhkett Direct Flux and Torque Regvilation in a PWM inverter Induction Motor Drive | |||
| .IEEE Trans Ind | |||
| Appl/vol lA-lV N0.2 March/April, | |||
| -. | |||
