Изобретение относится к электротехнике и может быть использовано ля автоматического управления электроприводами, построенными по системе преобразователь частоты - асинхронный электродвигатель.
Целью изобретения является повыение точности регулирования элект- ромеханических и энергетических характеристик.
На Лиг. 1 приведена структурная схема электропривода переменного тока; на фиг. 2 - структурная схема атчика момента; на фиг. 3 - структурная схема датчика напряжения в системе координат обобщенного вектора тока статора.
Электропривод переменного тока (фиг. 1) содержит т-фазный асинхронный электродвигатель 1 с короткозамкнутым ротором и статорной обмоткой, соединенной с т/3 трехфазные системы и подключенной к преобразог вателю 2 частоты, входы которого соединены с выходами блока 3 преобразования координат, пять сумматоров 4-8, датчик 9 частоты вращения, блок
10 задания частоты вращения, регуля-- тор И частоты вращения, датчик 12 тока статора, датчик 13 напряжения в системе координат обобщенного вектора тока статора, датчик 14 момента,
регулятор 15 момента, первый 16 и второй 17 регуляторы напряжения, регулятор 18 тока статора, блок 19 задания начального тока статора, блок 20 определения модуля вектора тока статора, входы датчика 12 тока статора и первые входы датчика 13 на- пряжения в системе координат обобщенного вектора тока статора соединены с двумя фазами каждой из т/3 трехфазной систем статорной обмотки т-фазного электродвигателя 1, выход блока 19 задания начального тока статора соединен с первым входом блока 20 определения модуля вектора тока статора, выход которого подключен к первому входу третьего сумматора 6, соединенного выходом через регулятор 18 тока статора с первым входом четвертого сумматора 7,выход которого через первый регулятор 16 напряжения соединен с первым входом блока 3 преобразования координат и вторым входом датчика 13 напряжения в системе координат обобщенного вектора тока статора, первый выход ко-
0
5
5
0
5
0
5
0
торого соединен с вторым входом четвертого сумматора 7, выход датчика 9 частоты вращения соединен с вторым входом датчика 14 момента и первым входом первого сумматора 4, второй вход которого соединен с выходом блока 10 задания частоты вращения, а выход первого сумматора 4 через регулятор 11 частоты вращения соединен с вторым входом блока 20 определения модуля вектора тока статора и с первым входом второго сумматора 5, выход которого через регулятор 15 момента соединен с вторым входом блока 3 преобразования координат, первым входом пятого сумматора 8 и первым входом датчика 14 момента, выход которого соединен с вторым входом второго сумматора 5, выход пятого сумматора 8 через второй регулятор 17 напряжения соединен с третьим входом блока 3 преобразования координат и третьим входом датчика 13 напряжения в системе координат обобщенного вектора тока статора, второй выход которого подключен к второму входу пятого сумматора 8, четвертьй- и пятый входы датчика 13 напряжения в системе координат обобп1енного вектора тока статора соединены соответственно с первым и вторьм выходами датчика 12 тока статора, третий выход которого соединен с вторым входом третьего сумматора 6 и третьим входом датчика 1-4 момента.
Датчик 14 момента (фиг, 2) содержит сумматор 21, блок 22 возведения в квадрат, блок 23 умножения, колебательное звено 24,-выход которого образует выход-датчика 14 момента, первый и второй входы сумматора 21 образуют первый и второй входы датчика 14 момента, выход сумматора 21 соединен с первым входом блока 23 .умножения, выход которого подключен по входу колебательного, звена 24, второй вход блока 23 умножения -соединен с выходом блока 22 возведения в квадрат, вход которого образует третий вход датчика 14 момента.
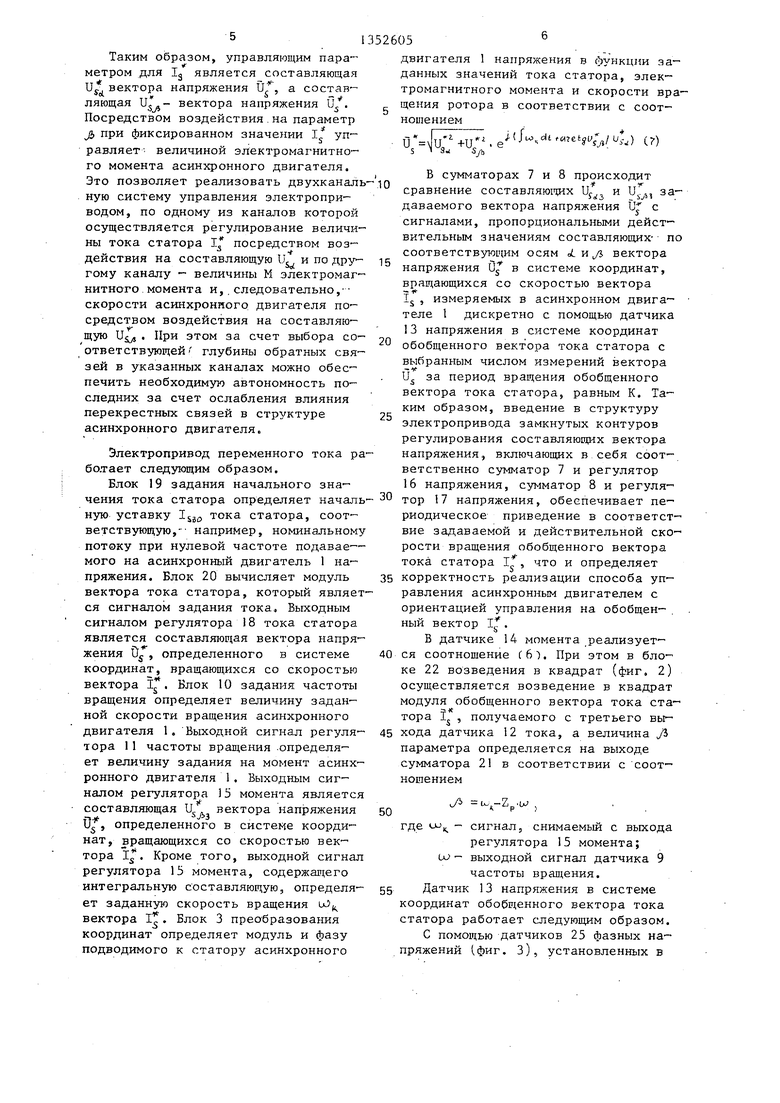
Датчик 13 напряжения в системе координат обобщенного вектора тока статора содержит 2т/3 датчиков 25 55 фазных напряжений, блок 26 вычисления проекций обобщенного вектора тока статора, блок 27 вычисления проекций обобщенного вектора напряжения в системе координат, связан
1 ной с первой трехфазной системой статорной обмотки, блок 28 индикации нуля, блок 29 вычисления проекций обобщенного вектора напряжения, два блока выборки 30 и хранения 31 информации, два блока 32,-- 33 определения знака, входы 2т/3 датчиков 25 фазных напряжений образуют первые входы датчика 13 напряжения в системе координат обобщенного вектора тока статора, входы блока 26 вычисления проекций обобщенного вектора тока статора образуют четвертый и пятый входы датчика 13 напряжения в системе координат обобщенного вектора тока статора, N выходов блока 26 вычисления проекций обобщенного вектора тока статора через блок 28 индикации нуля соединены с соответствующими N входами блока 29 вычисления проекций обобщенного вектора напряжения, (N+l)-й и (Ш+2)-й, входы которого соединены с выходами блока 27 вычисления проекций обоб- щенноРо вектора напряжения в системе координат, связанной- с первой трехфазной системой статорной обмотки, входы которого соединены с выходами 2т/3 датчиков 25 фазных-напря- жений, первьй и второй выходы блока 29 вычисления проекций обобщенного вектора напряжения соединены с входами соответственно первого 30 и второго 31 блоков, выборки и хранения информации, выходы которых соединены с первыми входами соответственно первого 32 и второго 33 блоков определения знака, второй вход первого блока 32 определения знака и его выход образуют соответственно- второй вход и первый выход датчика 13 напряжения г в системе координат обобщенного вектора тока статора, второй вход второго блока 33 определения знака и его выход образуют соответственно третий вход и второй выход датчика 13 напряжения в системе координат обобщенного вектора тока статора .
В электроприводе переменного тока по схеме, представленной на фиг. 1, осуществляется управление т-фазным асинхронным двигателем с ориентацией управления на обобщенный вектор
тока статора .j
I. Уравнения т-фазного асинхронного двигателя при их разложении на оси oi и ортогональной системы вращающихся координат (ось .
5
о( совпадает с вектором торной форме имеют вид:
I/)
в
К,
Т,Р+1
(uJ+K
и :
f.
+К (1)
г-у5
0
15
20
2605
д.- 1j
уз
Ч
ZJ
ц/ w г
Кг
Tjp+r s
К
%ь
Л U/
м--к;,1,у.
гл т, f
(2) (3) (4) (5)
где и 51, Y, - обобщенные векторы
напряжения, тока,ста- тора и потокосцеплег ния ротора соответ ственно, определяемые согласно:
f
V
го/3
I
Y. е
f - -
где Y; - вектор соответств5тощего
электромагнитного параметра для i-ой трехфазной системы статорной обмотки га- фазного асинхронного ABH- гателя;
соответственно коэффициен-- ты и постоянные времени, определяемые конструктивны
ми параметрами двигателя; / t -Zou; - скольжение вектора I, от-
0
носительно.ротора, враща
ющегося со скоростью ю;
число пар полюсов двига-.f
теля;
скорость вращения вектоZP Чс
ра Ij.
Из приведенных соотношений выте- 5 кает, что
г
4 - , Тт,
Кд .Л,
50
Откуда, учитьшая, что
получаем следующее для момента:
К
соотношение
- s
(6)
где К,,.
5i
Таким образом, управляющим параметром для Ig является составляющая и вектора напряжения U , а составляющая иГ,- вектора напряжения О/. Посредством воздействия.на параметр ji, при фиксированном значении 1 управляет величиной электромагнитно го момента асинхронного двигателя. Это позволяет реализовать двухканаль ную систему управления электроприводом, по одному из каналов которой осуществляется регулирование величины тока статора 1 посредством воздействия на составляющую И, и по другому каналу - величины М электромагнитного момента и, следовательно,- скорости асинхронного двигателя посредством воздействия на составляющую Uj . При этом за счет выбора соответствующей глубины обратных связей в указанных каналах можно обеспечить необходимую автономность последних за счет ослабления влияния перекрестных связей в структуре асинхронного двигателя.
Электропривод переменного тока ра бо.тает следующим образом.
Блок 19 задания начального значения тока статора определяет началь ную уставку тока статора, соответствующую, например, номинальному потоку при нулевой частоте подавае - мого на асинхронный двигатель 1 напряжения. Блок 20 вычисляет модуль вектора тока статора, который является сигналом задания тока Выходным сигналом регулятора 18 тока статора является составляющая вектора напряжения 0, определенного в системе координат, вращающихся со скоростью вектора L . Блок 10 задания частоты вращения определяет величину заданной скорости вращения асинхронного двигателя 1, Выходной сигнал регулятора 11 частоты вращения .определяет величину задания на момент асинхронного двигателя 1. Выходным сигналом регулятора 15 момента является
составляющая Ц. . вектора напряжения
Uj, определенного в системе координат, вращающихся со скоростью вектора Ij. Кроме того, выходной сигнал регулятора 15 момента, содержащего интегральную составляющую, определяет заданную скорость вращения uJ вектора 1. Блок 3 преобразования координат определяет модуль и фазу подводимого к статору асинхронного
52605
двигателя 1 напряжения в функции заданных значений тока статора, электромагнитного момента и скорости вра- щения ротора в соответствии с соотношением
+и . (7)
S 3, Syi
I в сумматорах 7 и 8 происходит
сравнение составляю1 9 х Uj и задаваемого вектора напряжения U с сигналами, пропорциональными действительным значениям составляющих- по соответствуюьцим осям (. и yj вектора
напряжения 0 в системе координат, вращающихся со скоростью вектора Ij, измеряемых в асинхронном двигателе 1 дискретно с помощью датчика 13 напряжения в системе координат
20 обобщенного вектора тока статора с выбранным числом измерений вектора и за период вращения обобщенного вектора тока статора, равным К. Таким образом, введение в структуру электропривода замкнутых контуров регулирования составляющих вектора напряжения, включаюшзнх в, себя соответственно сумматор 7 и регулятор 16 напряжения, сумматор 8 и регуля- 30 гррр -j напряжения, обеспечивает периодическое приведение в соответствие задаваемой и действительной скорости вращения обобщенного вектора тока статора 1, что и определяет
35 корректность реализации способа управления асинхронным двигателем с ориентацией управления на обобщенный вектор 1.
В датчике 14 момента реализует-
40 ся соотношение С 6). При этом в блоке 22 возведения в квадрат (фиг, 2) осуществляется возведение в квадрат модуля обобщенного вектора тока статора 1 , получаемого с третьего вы45 хода датчика 12 тока, а величина уЗ параметра определяется на выходе сумматора 21 в соответствии с соотношением
25
50
(-Zp.u; ,
где - сигнал, снимаемый с выхода
регулятора 15 момента; Сх) - выходной сигнал датчика 9
частоты вращения.
55 Датчик 13 напряжения в системе координат обобщенного вектора тока статора работает следующим образом. С помощью датчиков 25 фазных напряжений (фиг. З), установленных в
фазах А и В каждой трехфазной сист статорной обмотки двигателя 1, снимается информация о мгновенных знаниях фазных напряжений Цд. и U. На их основе в блоке 27 определяют составляющие U и U обобщенного вектора напряжения U. по осям и системы ортогональных координат, связанных с первой трехфазной системой статорной обмотки многофазного двигателя I.
В блоке 26 вычисления проекций обобщенного вектора тока статора н основании поступающих на его входы
с первого и второго выходов датчика 12 тока (фиг. 1) сигналов 1,. и
осуществляется, определение составляющих и 1 .обобщенного вектора тока статора по осям Л KJb К/4 сдвинутых в пространстве систем ортогональных координат в соответствии с соотнощениями:
).1пГ1/)/зЧГ)/
Ci--«-J, t,
f) f yiUClJ -Wfi -i).{ /u
где задаваемое число измерений, обобщенного вектора напряжения в системе координат обобщенного вектора тока статора {
Аналогично в блоке 29 вычисления проекций обобщенного вектора напряения на основании сигналов 11 и и - с выхода блока 27 осуществляет-
ся определение составляющих и Vsju. fl, обобщенного вектора напряжения tJ . по осям ( и 1/1 к/4 сдвинутых в пространстве систем ортогональных координат. При этом число составляющих .
ляющих 1/,
IL . равно числу составS tJb - и каждая пара сос- тавляющих и строго соответствует двум составляющим и if;,-л с одинаковым с ними индексом
jt/MJi/a
уц. Б блоке 28 индикации нуля для каждой пары знакопеременных сигналов /м- л I,-., фиксируется момент времени их перехода через нулевое значение, и в этот момент подается раз- рещающий сигнал на блок 29 на измерение мгновенных значений соответствующей им пары составляющих и U juVft Р этом по оси ортогональной системы координат, по которой составляющая или Ij -равна нулю, определяется модуль составляющей
8
10
15
20
;
25
30
35
обобщенного вектора напряжеI Us.s.i
ния Uj по оси Jb системы координат обобщенного вектора тока статора, а по другой оси - модуль составляющей I UsJst обобщенного вектора напряжения по оси «( указанной: системы координат. Полученные сигналы и Uj. поступают соответственно в блоки выборки 30 и хранения 31 информации, где информация о них хранится до момента следующего измерения составляющих lUj и / sjiist чего в них запоминаются новые значения этих сигналов и т.д. В блоках 32, 33 определения знака в зависимости от полярности выходных сигналов U и регуляторов 16 и 17 напряжения в структуре на фиг. 1 происходит определение- знаков выходных сигналов блоков выборки 30 и хранения 31 информащш соответственно таким образом, чтобы полярность выходного сигнала блока 30 выборки и хранения информации совпадала с полярностью выходного сигнала регулятора 16 напряжения, а полярность выходного сигнала блока 31 борки и хранения информации - с полярностью выходного сигнала регулятора 17 напряжения. Для многофазного асинхронного двигател оси К/4 сдвинутых в пространстве систем ортогональных координат можно совме- PiaTb по направлению с осями соответствующих фаз многофазной обмотки статора.
Таким образом, предлагаемый электропривод переменного тока за счет введения в него двух замкнутых контуров регулирования составляющих обобщенного вектора напряжения,-датчика напряжения в системе координат обобщенного вектора тока статора и датчика момента с предложенными
структурными схемами последних обеспечивает повьшение энергетических, динамических и точностных показателей регулирования т-фазного асинхг ройного двигателя.
Формула изобретения
1. Электропривод переменного то- ка, содержаний т-фазный асинхронный электродвигатель с короткозамкнутым ротором и статорной обмоткой, соединенной в т/3 трехфазные системы и подключенной к преобразователю частоты, входы которого соединены с выходами блока преобразования координат, четыре сумматора, датчик частоты вращения, выходом соединенный с первым входом первого сумматора, второй вход которого подключен к выходу блока задания частоты вращения, а выход первого сумматора соединен с входом регулятора частоты -вращения, выход которого соединен с первым входом второго сумматора, отл «и чающийся тем, что, с целью повышения точности регулирования электромеханических и энер- гетических характеристик, введены датчик тока статора, датчик напряжения в системе координат обобщенного вектора тока статора, датчик момент регулятор момента, первый и второй регуляторы напряжения, регулятор тока статора, блок задания начального тока статора, блок определения модуля вектора тока статора, пятый сумматор, входы датчика тока соединены с первой и второй фазами каждой из т/3 трехфазной системы статорной обмотки т-фазного электродвигателя,- первые входы датчика напряжения в системе координат обобщенного вектора тока статора соединены с первой и второй фазами каждой из т/3 трехфазной системы статорной обмотки т-фазного электродвигателя,- выход блока задания начального тока статора соединен с первым входом блока определения модуля вектора тока статора, выход которого соединен; с первым входом третьего сумматора, выход которого через регулятор тока статора соединен.о первым входом четвертого сумматора, выход которого через первый регулятор напряжения подключен к первому входу блока преобразования координат и второму входу датчика напряжения в системе координат обобщенного вектора тока статора, первый выход которого подключен к второму входу четвертого сумматора, второй вход блока опреде- леиия модуля вектора.тока статора соединен с первым входом второго сумматора, выход которого через регулятор момента соединен с первым входом датчика момента, вторым входом блока преобразования координат и первым входом пятого сумматора, выход которого через второй регулятор напряжения подключен к третьему
10
15
52605
входу блока преобразования координат и к третьему входу датчика напряжения в системе координат -обобщенного вектора тока статора, второй выход которого соединен с вторым входом пятого сумматора, второй вход второго сумматора подключен к выходу датчика момента, второй вход которого соединен с выводом датчика частоты вращения, четвертый и пятый, входы датчика напряжения в системе координат обобщенного вектора тока статора соединены соответственно с первым и вторым выходами датчика тока, третий выход которого соединен с вторым входом третьего сумматора и третьим входом датчика момента.
2. Электропривод по п. I, отличающийся тем, что.датчик момента содержит сумматор, блок возведения в квадрат, блок умножения, колебательное звено, выход которого образует выход датчика момента, первый и второй входы сумматора образуют первый и второй входы датчика момента, выход сумматора соединен с первым входом блока умножения, выход которого подключен к входу колебательного звена, второй вход блока умножения соединен с выходом блока возведения в квадрат, вход которого образует третий вход датчика момента
20
25
30
3. Электропривод по п. 1, о т
личаю щийся тем, что датчик напряжения в системе координат обобщенного вектора тока статора содержит 2in/3 датчиков фазных напряжений, блок вычисления проекций обобщенного вектора тока статора, блок вычисления проекций обобщенного вектора напряжения в системе координат, связанной с первой трехфазной системой статорной обмотки, блок индикации
нуля, блок вычисления проекций обобщенного вектора напряжения, два блока выборки и хранения информащ1И, два блока определения знака, входы 2т/3 датчиков фазных напряжений об- .
разуют первые входы датчика напряжения в системе координат обобщенного вектора тока статора, входы блока вычисления проекций обобщенного вектора тока статора образуют четвер-
тый и пятый входы датчика напряжения в системе координат обобщенного вектора тока статора, N выходов блока вычисления проекций обобщенного вектора тока статора через блок индикации нуля соединены с соответствукг- щими N входами блока вычисления проекций обобщенного вектора напряжения N+1 и TI+2 входы которого соединены с выходами блока вычисления проекций обобщенного вектора напряжения в системе координат, связанной с первой трехфазной системой статорной обмотки, входы которого соединены с выходами 2т/3 датчиков фазных напряжений, первый и второй выходы блока вычисления проекций обобщенного вектора напряжения соединены с входами соответственно первого и второго бло-
ков выборки и.хранения информации, выходы которых соединены с первыми входами соответственно первого и второго блоков определения знака, второй вход первого блока определения знака и его выход образуют соответственно второй.вход и первый выход датчика напряжения в системе координат обобщенного вектора тока статора,- второй вход второго блока определения знака и его выход образуют соответственно третий вход и второй выход датчика напряжения в системе координат обобщенного вектора тока статора.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения электромагнитного момента асинхронного двигателя | 1982 |
|
SU1053254A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1995 |
|
RU2101846C1 |
| Устройство для определения проекций обобщенного вектора напряжения статора @ -фазного асинхронного двигателя | 1987 |
|
SU1458834A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2313895C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2396696C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2512873C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2010 |
|
RU2447573C1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ С КОРОТКОЗАМКНУТЫМ РОТОРОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2458447C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2422979C1 |

Изобретение относится к электротехнике и может быть использовано для автоматического управления электроприводами, построенными по систеуме преобразователь частоты - асинх ронный электродвигатель. Целью изобретения является повьшение точности регулирования электромеханических и электрических характеристик. За счет введения в электропривод датчика 12 тока статора, датчика 13 напряжения в системе координат обобщенного вектора тока статора, датчика 14 момента, регулятора 15 момента, первого 16 и второго 17 регуляторов на- „пряжения;,, регулятора 18 тока статора, блока 19 задания начального тока статора, блока 20 определения модуля вектора тока статора и пятого сумматора 8 и организации двух, замкнутых контуров регулирования составляющих обобп1енного вектора напряжения обеспечивается повышение энергетических, динамических и точност- . ных показателей регулирования т-фаз- ного асинхронного двигателя. 2 з.п. ф-лы, 3 Ш1. (Л сд qjua.i
фиг.г
Составитель С.Позднухов Редактор Н.Слободяник Техред М.Ходанич Корректор В.Гирняк
Заказ 5573/54 Тираж 659Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Рау1пская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Устройство для многорежимного управления -фазным шаговым двигателем | 1974 |
|
SU612376A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Частотно-регулируемый асинхронный электропривод | 1981 |
|
SU1046891A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
