Изобретение относится к автоматическому управлению электроприводами и касается устройства для управления электроприводом по системе "преобразователь частоты асинхронный двигатель".
Известны электропривод с асинхронной короткозамкнутой машиной [1] содержащий асинхронный двигатель с короткозамкнутым ротором, подключенный к преобразователю частоты с автономным инвертором напряжения, блок преобразования координат, первый вход которого через первый сумматор и регулятор частоты соединен с выходом блока задания частоты вращения, третий вход через третий сумматор соединен с выходом блока задания потокосцепления, а два выхода подключены к управляющим входам преобразователя частоты, определитель частоты вращения, выполненный в виде тахогенератора, установленного на валу асинхронного двигателя и соединенного выходом с вторым входом регулятора частоты и вторым входом второго сумматора, выход которого подключен также ко второму входу первого сумматора, и блок умножения, первый вход которого подключен к выходу регулятора частоты, второй вход к выходу второго сумматора, а выход ко второму входу третьего сумматора.
Недостатком данного электропривода является то, что он позволяет осуществить качественное управления асинхронными двигателями лишь в статических режимах. Это вытекает из самого принципа управления асинхронным двигателем, который реализует данное устройство. Это устройство осуществляет не прямое, а косвенное управления выбранными регулируемыми электромагнитными параметрами (потокосцепление ротора и электромагнитный момент) и, более того, не содержит замкнутых контуров регулирования указанных переменных. Кроме того, структура данного устройства получена на основе ряда допущений, справедливых лишь для установившихся режимов, и которые в динамических режимах приводят к значительному отклонению электромагнитных процессов в электроприводе от оптимальных.
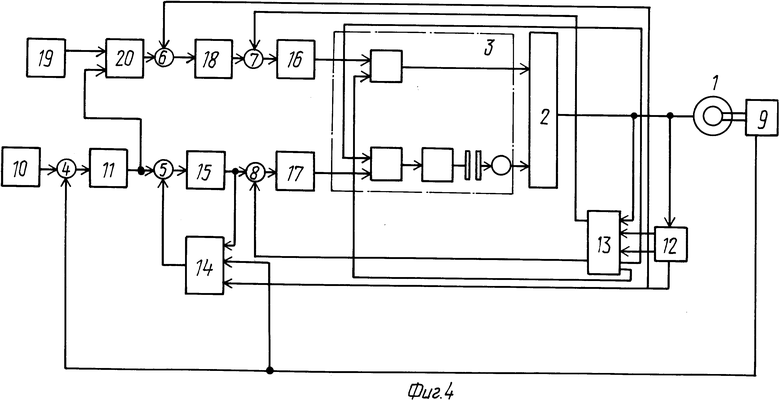
Наиболее близким к предлагаемому изобретению по технической сущности является частотно-регулируемый асинхронный электропривод фиг.4 [2] содержащий m-фазный асинхронный двигатель с коротко-замкнутым ротором, в котором статорная обмотка соединена в m/3 трехфазные системы, подключенный к преобразователю частоты, управляющие входы которого подсоединены к двум выходам блока преобразования координат, пять сумматоров, датчик частоты вращения, выходом соединенный с первым входом первого сумматора, второй вход которого подключен к выходу блока задания частоты вращения, а выход первого сумматора соединен с входом регулятора частоты вращения, выход которого соединен с первым входом второго сумматора, а также датчик тока статора, датчик напряжения в системе координат обобщенного вектора тока статора, датчик момента, регулятор момента, первый и второй регуляторы напряжения, регулятор тока статора, блок задания начального тока статора, блок определения модуля вектора тока статора, входы датчика тока соединены с первой и второй фазами каждой из m/3 трехфазной системы статорной обмотки m-фазного электродвигателя, первые входы датчика напряжения в системе координат обобщенного вектора тока статора соединены с первой и второй фазами каждой из m/3 трехфазной системы статорной обмотки m-фазного электродвигателя, выходы блока задания начального тока статора соединены с первым входом блока определения модуля вектора статора, выход которого соединен с первым входом третьего сумматора, выход которого через регулятор тока статора соединен с первым входом четвертого сумматора, выход которого через первый регулятор напряжения подключен к первому входу блока преобразования координат и второму входу датчика напряжения в системе координат обобщенного вектора тока статора, первый выход которого подключен к второму входу четвертого сумматора, второй вход блока определения модуля вектора тока статора соединен с первым входом второго сумматора, выход которого через регулятор момента соединен с первым входом датчика момента и первым входом пятого сумматора, выход которого через второй регулятор напряжения подключен к третьему входу блока преобразования координат и к третьему входу датчика напряжения в системе координат обобщенного вектора тока статора, второй выход которого соединен с вторым входом пятого сумматора, второй вход второго сумматора подключен к выходу датчика момента, четвертый и пятый входы датчика напряжения в системе координат обобщенного вектора тока статора соединены соответственно с первым и вторым выходами датчика тока, третий выход которого соединен с вторым входом третьего сумматора и третьим выходом датчика момента.
Недостатком данного электропривода является то, что неполная компенсация перекрестных связей объекта регулирования, а также приближенное вычисление обратной связи по электромагнитному моменту в устройство вычисления момента приводит к ухудшению динамических и энергетических показателей электропривода.
Технический результат предлагаемого изобретения заключается в улучшении динамических и энергетических показателей электропривода при обеспечении непосредственного регулирования электромагнитного момента двигателя и тока статора в системе координат, связанной с обобщенным вектором тока статора.
Технический результат достигается тем, что в электропривод переменного тока, содержащий m-фазный асинхронный двигатель с короткозамкнутым ротором, в котором статорная обмотка соединена в m/3 трехфазные системы, подключенный к преобразователю частоты, первый управляющий вход которого подсоединен к выходу вычислителя амплитуды, два входа которого подключены соответственно к выходам первого и второго регулятора напряжения причем вход первого регулятора напряжения подключен к выходу первого трехвходового сумматора, первый вход которого подсоединен к первому выходу датчика напряжения, второй вход первого сумматора подсоединен к выходу регулятора тока, вход которого подключен к выходу второго сумматора, первый вход которого соединен с первым выходом датчика тока, а второй вход соединен с выходом блока определения модуля тока статора, первый вход которого соединен с выходом блока задания начального тока статора, а второй вход через регулятор скорости с выходом третьего сумматора, первый вход которого подключен к выходу блока задания частоты вращения, а второй вход подключен к выходу датчика частоты вращения, установленного на валу асинхронного двигателя, причем выхода регулятора скорости подключен также к первому входу четвертого сумматора, второй вход которого соединен с выходом вычислителя момента, первый вход которого соединен с первым выходом датчика тока, а выход четвертого сумматора соединен с входом регулятора момента, выход которого соединен с первым входом пятого трехвходного сумматора, второй вход которого соединен с вторым выходом датчика напряжения, выход пятого сумматора соединен с входом второго регулятора напряжения, причем второй и третий выходы датчика тока соединены с соответствующими входами датчика напряжения, входы датчика тока и напряжения включены в соответствующие фазные цепи двигателя, введены блок компенсации перекрестных нелинейных связей, первый вход которого соединен с первым выходом датчика тока, второй вход соединен с выходом датчика частоты вращения, а третий вход соединен с выходом шестого сумматора, причем первый выход блока компенсации соединен с третьим входом первого сумматора, второй выход соединен с третьим входом пятого сумматора, а третий выход соединен с входом блока возведения в квадрат, выход которого соединен с первым входом седьмого сумматора, второй вход которого соединен с выходом блока задания квадрата потокосцепления ротора, а выход седьмого сумматора соединен с входом блока извлечения квадратного корня, выход которого соединен с первым входом первого блока деления, второй вход которого соединен с выходом второго блока деления, а выход первого блока деления соединен с первым входом шестого сумматора и с вторым входом вычислителя момента, первый вход второго делителя соединен с первым выходом датчика тока статора, а второй вход через линейный блок соединен с выходом регулятора скорости, причем второй вход шестого сумматора соединен с выходом датчика частоты вращения, а выход шестого сумматора соединен с первым входом восьмого сумматора, второй вход которого подключен к выходу первого сумматора, а третий вход к выходу пятого сумматора, выход восьмого сумматора соединен с вторым управляющим входом преобразователя частоты. Технический результат достигается также тем, что вычислитель момента содержит три блока перемножения, два линейных блока, девятый сумматор и два функциональных блока, реализующих функцию апериодического звена, при этом первые входы первого и второго блоков перемножения образуют первый вход вычислителя момента, а вход второго линейного блока и первый вход третьего блока перемножения образуют второй вход вычислителя момента, причем выход второго линейного блока подключен к первому входу девятого сумматора, второй вход которого соединен с выходом первого блока перемножения, а выход соединен с входом первого функционального блока с упомянутой функцией, выход которого соединен с вторым входом второго блока перемножения, выход которого соединен с входом второго функционального блока с упомянутой функцией, к выходу которого подключены второй вход первого блока перемножения и второй вход третьего блока перемножения, выход которого через третий линейный блок образует выход вычислителя момента.
Кроме того, указанная цель достигается тем, что блок компенсации перекрестных нелинейных связей содержит шесть линейных блоков, четыре блока перемножения, два функциональных блока, реализующих функцию апериодического звена, и с десятого по тринадцатый сумматоры, при этом вход четвертого линейного блока образует первый вход блока компенсации, а выход четвертого линейного блока соединен с первым входом десятого сумматора, второй вход которого соединен с выходом четвертого блока перемножения, а выход через третий функциональный блок с упомянутой функцией соединен с входом пятого линейного блока, первыми входами пятого и шестого блоков перемножения, причем выход пятого линейного блока соединен с первым входом одиннадцатого сумматора, выход которого образует первый выход блока компенсации, а второй вход соединен через шестой линейный блок с выходом седьмого блока перемножения, причем второй вход седьмого блока перемножения, второй вход пятого блока перемножения и второй вход двенадцатого сумматора подсоединены к выходу седьмого линейного блока, вход которого образует второй вход блока компенсации, причем первый вход двенадцатого сумматора образует третий вход блока компенсации, а его выход соединен с первым входом четвертого блока перемножения и вторым входом шестого блока перемножения, выход которого через четвертый функциональный блок с упомянутой функцией образует третий выход блока компенсации, а также соединен с вторым входом четвертого блока перемножения и первым входом седьмого блока перемножения, причем выход пятого блока перемножения через восьмой линейный блок соединен с первым входом тринадцатого сумматора, второй вход которого через девятый линейный блок соединен с выходом четвертого функционального блока с упомянутой функцией, а выход тринадцатого сумматора образует второй выход блока компенсации.
Изобретение иллюстрируется фиг.1 4.
На фиг.1 показана структурная схема предлагаемого электропривода.
Электропривод переменного тока содержит m-фазный асинхронный двигатель 1 с короткозамкнутым ротором и статорной обмоткой, соединенной в m/N N-фазные системы и подключенной к преобразователю частоты 2, вычислитель амплитуды 3, датчик частоты вращения 4, восьми сумматоров 5 12, датчик напряжения 13, датчик тока 14, блок задания частоты вращения 15, регулятор частоты вращения 16, регулятор момента 17, делители 18, 19, линейный блок 20, второй регулятор напряжения 21, вычислитель момента 22, блок компенсации перекрестных нелинейных связей 23, блок возведения в квадрат 24, блок задания квадрата потокосцепления ротора 25, блок извлечения квадратного корня 26, блок задания начального тока статора 27, блок определения модуля вектора тока статора 28, регулятор тока статора 29, первый регулятор напряжения 30, входы датчика 14 тока статора и первые входы датчика 13 напряжения в системе координат обобщенного вектора тока статора соединены с двумя фазами каждой из m/N N-фазных систем статорной обмотки m-фазного электродвигателя 1, выход блока 27 задания начального тока статора соединен с первым входом блока 28 определения модуля вектора тока статора, выход которого подключен к второму входу второго сумматора 6, соединенного выходом через регулятор 29 тока статора с вторым входом первого сумматора 8, выход которого соединен с вторым входом восьмого сумматора 11 и через первый регулятор напряжения 30, соединенного с первым входом блока 3 вычислителя амплитуды, выход которого соединен с первым входом преобразователя частоты 2, датчик частоты вращения 4 соединен с вторым входом третьего сумматора 5, с вторым входом блока компенсации перекрестных нелинейных связей 23 и с вторым входом шестого сумматора 10, сигнал выхода блока задания частоты вращения 15 подается на первый вход третьего сумматора 5, выход которого через блок 16 регулятора частоты вращения соединяется с первым входом четвертого сумматора 7, вторым входом блока 28 определения модуля вектора тока статора и с входом первого линейного блока 20, выход четвертого сумматора 7 через блок 17 регулятора момента соединяется с первым входом пятого сумматора 12, выход которого соединяется с третьим входом восьмого сумматора 11 и через блок 21 второго регулятора напряжения соединяется с вторым входом вычислителя 3 амплитуды, второй выход датчика 13 напряжения соединяется с вторым входом пятого сумматора 12, первый выход датчика 13 напряжения соединяется с первым входом первого сумматора 8, первый выход датчика 14 тока соединяется с первым входом второго сумматора 6, с первым входом блока компенсации перекрестных нелинейных связей 23, с первым входом блока 22 вычислителя момента и с первым входом первого делителя 18, а второй и третий выходы датчика 14 тока соединены, соответственно, с третьим и четвертым входами датчика напряжения 13, выход блока 22 вычислителя момента соединяется с вторым входом четвертого сумматора 7, выход восьмого сумматора 11 соединяется с вторым входом преобразователя частоты 2, первый выход блока компенсации перекрестных нелинейных связей 23 соединяется с третьим входом первого сумматора 8, второй выход блока компенсации перекрестных нелинейных связей 23 соединяется с третьим входом пятого сумматора 12, третий выход блока 23 компенсации перекрестных нелинейных связей через блок 24 возведения в квадрат соединяется с первым входом седьмого сумматора 9, выход которого через блок 26 извлечения квадратного корня соединяется с первым входом первого делителя 19, выход блока 25 задания квадрата потокосцепления соединяется с вторым входом седьмого сумматора 9, выход линейного блока 20 соединяется с вторым входом второго делителя 18, выход которого соединяется с вторым входом второго делителя 19, выход которого соединяется с вторым входом вычислителя момента 22 и с первым входом шестого сумматора 10, выход которого соединяется с первым входом восьмого сумматора 11 и с третьим входом блока компенсации перекрестных нелинейных связей 23.
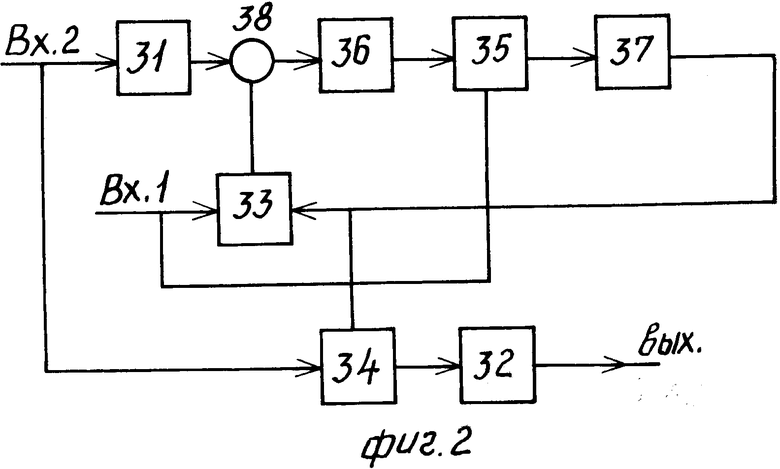
Вычислитель момента 22 (фиг.2) содержит два линейных блока 31, 32, три блока умножения 33 35, два функциональных блока с функцией апериодического звена 36, 37 и сумматор 38, вход второго линейного блока 31 и первый вход третьего блока умножения 34 образуют второй вход вычислителя электромагнитного момента 22, выход второго линейного блока 31 соединяется с первым входом девятого сумматора 38, выход первого блока умножения 33 соединяется с вторым входом девятого сумматора 38, выход девятого сумматора 38 через первый функциональный блок с функцией апериодического звена 36 соединяется с вторым входом второго блока умножения 35, первый вход первого блока умножения 33 и первый вход второго блока умножения 35 образуют первый вход вычислителя электромагнитного момента 22, выход второго блока умножения 35 через второй функциональный блок с функцией апериодического звена 37 соединяется с вторым входом первого блока умножения 33 и с вторым входом третьего блока умножения 34, выход которого соединяется с входом третьего линейного блока 32, выход второго линейного блока 32 образует выход вычислителя электромагнитного момента 22.
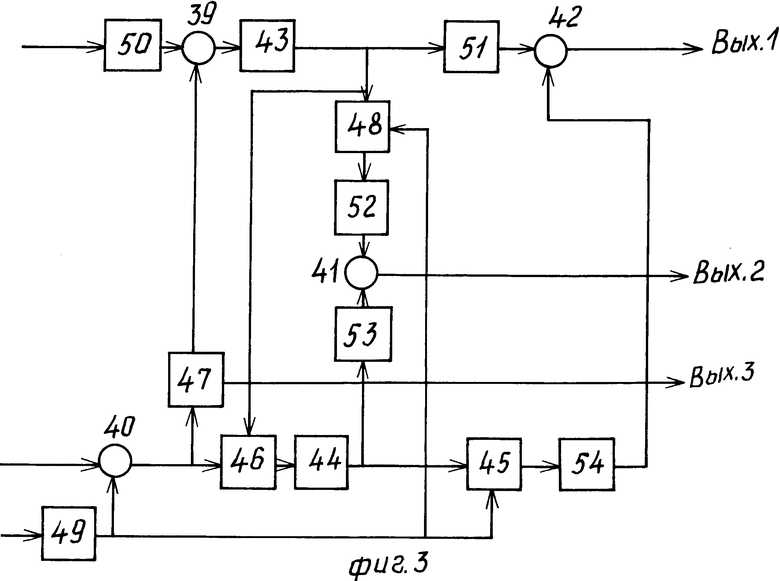
Блок 23 компенсации перекрестных нелинейных связей (фиг.3) содержит четыре сумматора 39 42, два функциональных блока с функцией апериодического звена 43, 44, четыре блока умножения 45 48, шесть линейных блоков 49 54, вход четвертого линейного блока 50 образует первый вход блока 23 компенсации перекрестных нелинейных связей, выход четвертого линейного блока 50 соединяется с первым входом десятого сумматора 39, выход которого соединяется с входом третьего функционального блока с функцией апериодического звена 43, выход которого соединяется с первым входом пятого блока 48 умножения, с первым входом шестого блока 46 умножения и с входом пятого линейного блока 51, выход которого соединяется с первым входом одиннадцатого сумматора 42, выход которого образует первый выход блока 23 компенсации перекрестных нелинейных связей, первый вход двенадцатого сумматора 40 образует третий вход блока 23 компенсации перекрестных нелинейных связей, выход двенадцатого сумматора 40 соединяется с первым входом четвертого блока 47 умножения и с вторым входом блока 46 умножения, выход которого соединяется с входом четвертого функционального блока с функцией апериодического звена 44, выход которого образует третий выход блока 23 компенсации перекрестных нелинейных связей, а также соединяется с вторым входом четвертого блока 47 умножения, с входом девятого линейного блока 53 и с первым входом седьмого блока умножения 45, выход которого соединяется с входом шестого линейного блока 54, выход которого соединяется с вторым входом одинадцатого сумматора 42, вход седьмого линейного блока 49 образует второй вход блока 23 компенсации перекрестных нелинейных связей, выход седьмого линейного блока 49 соединяется с вторым входом двенадцатого сумматора 40, с вторым входом седьмого блока 45 умножения и с вторым входом пятого блока 48 умножения, выход которого соединяется с входом восьмого линейного блока 52, выход которого соединяется с первым входом тринадцатого сумматора 41, выход которого образует второй выход блока 23 компенсации перекрестных нелинейных связей, выход девятого линейного блока 53 соединяется с вторым входом тринадцатого сумматора 41, выход четвертого блока 47 умножения соединяется с вторым входом десятого сумматора 39.
В электроприводе переменного тока по схеме, представленной на фиг.1 осуществляется управление m-фазным асинхронным двигателем с ориентацией управления на обобщенный вектор тока статора  . Уравнения m-фазного асинхронного двигателя при их разложении на оси α и β ортогональной системы вращающихся координат (ось a совпадает с вектором
. Уравнения m-фазного асинхронного двигателя при их разложении на оси α и β ортогональной системы вращающихся координат (ось a совпадает с вектором  ) имеет вид:
) имеет вид: ,
, ,
,
где p-оператор дифференцирования;  обобщенные вектора напряжения статора, тока статора и потокосцепления ротора, а U*; U*; Ψ*; Ψ* - проекции соответствующих векторов sα sβ ρα rβ на оси a и β
обобщенные вектора напряжения статора, тока статора и потокосцепления ротора, а U*; U*; Ψ*; Ψ* - проекции соответствующих векторов sα sβ ρα rβ на оси a и β
k1-k7, T1, T2 соответственно коэффициенты и постоянные времени, определяемые конструктивными параметрами двигателя;
b = ωk-zpω скольжение вектора  относительно ротора, вращающегося со скоростью ω Zp число пар полюсов, wk скорость вращения векторов
относительно ротора, вращающегося со скоростью ω Zp число пар полюсов, wk скорость вращения векторов 
Векторы  определяются в соответствии с выражением:
определяются в соответствии с выражением:
где Yki электромагнитная переменная (ток, потокосцепление и т.д.) i-й фазы k-ой N-фазной системы m-фазного асинхронного двигателя.
Из (1) вытекает, что управляющим параметром для I а составляющая Usβ* вектора напряжения
а составляющая Usβ* вектора напряжения  посредством воздействия на параметр β при фиксированном значении I
посредством воздействия на параметр β при фиксированном значении I
Электропривод переменного тока работает следующим образом.
Блок 27 задания начального значения тока статора определяет начальную установку Is30 тока статора, соответствующую, например, номинальному потоку при нулевой частоте подаваемого на асинхронный двигатель 1 напряжения. Блок 28 вычисляет модуль вектора тока статора, как
который является сигналом задания тока. В сумматоре 6 значение I определенного в системе координат, вращающихся со скоростью вектора
определенного в системе координат, вращающихся со скоростью вектора  Блок 15 задания частоты вращения задает величину скорости вращения асинхронного двигателя 1 ω3 В сумматоре 5 сигналы ω3 сравнивается с действительно величиной ω полученной с датчика задания частоты вращения 4. Значение Dw подается на вход регулятора тока. Выходной сигнал регулятора 16 частоты вращения определяет величину задания на момент M3 асинхронного двигателя 1. Величина M3 в сумматоре 7 сравнивается с величиной Mist, вычисляемой в блоке 27. Значение DM подается на вход регулятора момента. Выходным сигналом регулятора 17 момента является составляющая U
Блок 15 задания частоты вращения задает величину скорости вращения асинхронного двигателя 1 ω3 В сумматоре 5 сигналы ω3 сравнивается с действительно величиной ω полученной с датчика задания частоты вращения 4. Значение Dw подается на вход регулятора тока. Выходной сигнал регулятора 16 частоты вращения определяет величину задания на момент M3 асинхронного двигателя 1. Величина M3 в сумматоре 7 сравнивается с величиной Mist, вычисляемой в блоке 27. Значение DM подается на вход регулятора момента. Выходным сигналом регулятора 17 момента является составляющая U определенного в системе координат, вращающихся со скоростью вектора
определенного в системе координат, вращающихся со скоростью вектора  Блок 3 вычислителя амплитуды определяет модуль подводимого к статору асинхронного двигателя 1 напряжения в функции задания значений тока статора, электромагнитного момента и скорости вращения ротора в соответствии с соотношением:
Блок 3 вычислителя амплитуды определяет модуль подводимого к статору асинхронного двигателя 1 напряжения в функции задания значений тока статора, электромагнитного момента и скорости вращения ротора в соответствии с соотношением:
В сумматорах 8 и 12 происходит сравнение составляющих U с сигналами, пропорциональными действительным значениям составляющих по соответствующим осям α и β вектора напряжения
с сигналами, пропорциональными действительным значениям составляющих по соответствующим осям α и β вектора напряжения  в системе координат, вращающихся со скоростью вектора
в системе координат, вращающихся со скоростью вектора  измеряемых в асинхронном двигателе 1 с помощью датчика 13 напряжения в системе координат обобщенного вектора тока статора. Введение в структуру электропривода замкнутых контуров регулирования составляющих вектора напряжения, включающих в себя соответственно сумматор 8 и регулятор 30 напряжения, сумматор 12 и регулятор 21 напряжения [2] обеспечивает периодическое приведение в соответствие задаваемой и действительной скорости вращения обобщенного вектора тока статора
измеряемых в асинхронном двигателе 1 с помощью датчика 13 напряжения в системе координат обобщенного вектора тока статора. Введение в структуру электропривода замкнутых контуров регулирования составляющих вектора напряжения, включающих в себя соответственно сумматор 8 и регулятор 30 напряжения, сумматор 12 и регулятор 21 напряжения [2] обеспечивает периодическое приведение в соответствие задаваемой и действительной скорости вращения обобщенного вектора тока статора  что и определяет корректность реализации способа управления асинхронным двигателем с ориентацией управления на обобщенный вектор
что и определяет корректность реализации способа управления асинхронным двигателем с ориентацией управления на обобщенный вектор  В вычислителе момента 22 реализуется уравнение (5), причем
В вычислителе момента 22 реализуется уравнение (5), причем  таким образом, параметр M определяется:
таким образом, параметр M определяется:
Параметр J определяется из (4). С учетом этого:
Совместное решение (10) и (3) определяет структуру блока вычисления момента, причем параметр k5= Tk. На выходе вычислителя момента подаются сигналы: на вход 1 пропорциональный  на вход 2 Is.
на вход 2 Is.
В блоках 36 и 37 заложена функция  т.е. они представляют собой апериодическое звено.
т.е. они представляют собой апериодическое звено.
Блок компенсации 23 (фиг.3) осуществляет техническую линеаризацию объекта управления. В этом случае компенсация перекрестных нелинейных связей осуществляется за счет формирования в блоке компенсации соответственно на 1 и 2 выходах 23 развязывающих сигналов:
суммируемых с выходными сигналами регулятора момента 17 и регулятора тока 29 статора соответственно в сумматорах 8 и 12. Кроме того, выходным сигналом блока компенсации 23 является сигнал задания Ψrβ3 На первый вход блока компенсации 23 подается сигнал тока статора Is с первого выхода датчика тока статора 14. На второй вход блока компенсации 23 подается сигнал частоты вращения вала вдигателя с датчика 4 частоты вращения. На третий вход блока компенсации 23 подается сигнал синхронной частоты вращения ωk
Таким образом, введение дополнительных блоков и связей в структуру электропривода улучшают динамические и энергетические показатели системы в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2313895C1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ АСИНХРОННОГО ДВИГАТЕЛЯ В РЕГУЛИРУЕМОМ ЭЛЕКТРОПРИВОДЕ | 2000 |
|
RU2184417C1 |
| ВЫСОКОДИНАМИЧНЫЙ БЕЗДАТЧИКОВЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ МОМЕНТОМ | 2012 |
|
RU2498497C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| ЭЛЕКТРОПРИВОД | 1996 |
|
RU2127940C1 |
| СИСТЕМА УПРАВЛЕНИЯ МАШИНОЙ ДВОЙНОГО ПИТАНИЯ | 1995 |
|
RU2106055C1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1347142A1 |
Изобретение относится к автоматическому управлению электроприводами и касается устройства электропривода по системе "преобразователь частоты - асинхронный двигатель". В электропривод переменного тока введены блок компенсации, блок возведения в квадрат, блок задания квадрата потокосцепления ротора, блоки извлечения квадратного корня, двух делителей, сумматор, а также изменена структура вычислителя момента. Введение дополнительных блоков и связей в структуру электропривода улучшают динамические и энергетические показатели системы в целом. 2 з.п. ф-лы, 4 ил.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Частотно-регулируемый асинхронный электропривод | 1981 |
|
SU1046891A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод переменного тока | 1985 |
|
SU1352605A1 |
