Од
ьэ
Изобретение относится к устройст вам автоматического управления и может быть использовано в следящих электроприводах для приведения в движение различных механизмов с механическими передачами с переменной жесткостью и с нагрузкой с переменным моментом инерции, например, в робототехнике.
Цель изобретения - расширение области применения электропривода путем обеспечения его работоспособности при переменной жесткости механической передачи и нагрузке с переменным моментом инерции.
На чертеже изображена функциональная схема электропривода.
Устройство содержит первый сумматор 1, регулятор 2 положения, пятый сзп матор 3, блок 4 деления, шестой сумматор 5, сумматор 6, регулятор 7, блок 8 регулирования скорости, двигатель 9, объект 10 управления с упругим редуктором, датчик 11 положения, датчик 12 скорости, второй сумматор 13, первый блок 14 умножения, седьмой сумматор 15, третий интегратор 16, третий сумматор 17, первый интегратор 18, четвертый сумматор 19, второй блок 20 умножения, второй интегратор 21, блок 22 определения скорости и блок 23 определения ускорения.
Самонастраивающийся следящий электропривод работает следующим образом.
На первый вход сумматора 1 подается сигнал задания электропривода, на второй его вход - отрицательной обратной связи по углу выходного вала электропривода с выхода датчика 11 положения. Сигнал рассогласования, образующийся на выходе су1(1матора 1 , через пропорциональ- ньй регулятор 2 положения подается на первый вход сумматора 3, На второй и третий входы сумматора 3 пода ются сигналы отрицательньк обратных связей соответственно по скорости и ускорению выходного вала электропривода. Сигнал с выхода сумматора 3 подается на блок 4 деления, который представляет собой звено с переменным коэффициентом усиления. Переменный коэффициент усиления обратно пропорционален сигналу оценки отношения жесткости механической пере
5
0
5
дачи к моменту инерции нагрузки, поступающему на вход делителя блока 4 деления, С выхода блока 4 деления сигнал поступает на сумматор 5, в котором суммируется с сигналом положительной обр.гтной связи по скорости вала нагрузки, подаваемым на второй вход сумматора 5. На вькоде сумматора 5 формируется сигнал управления, который отрабатывается блоком 8 регулирования скорости, образуемым сумматором 6, регулятором 7, двигателем 9 и датчиком 12 скорости. Динамика блока 8 регулирования скорости обеспечивается настройкой регулятора 7, Блок 8 настраивается на предельное быстродействие. Двигатель 9 через объект 10 управления с упругие редуктором поворачивает входной вал датчика 11 положения, которьй вырабатьшает сигнал, пропорциональный угловому положению выходного вала , Блок 22 определения скорости и блок 13 определения ускорения вырабатьшают сигналы соответственно скорости и ускорения выходного вала привода. При достаточно большом быстродействии блока 8 его динамикой можно пренебречь по сравнению с динамическими процессами, определяемыми упругостью редуктора и моментом инерции нагрузки. В этом случае блок 8 регулирования скорости не оказьшаg ет демпфирующего действия на колебания, обусловленные упругостью редуктора и моментом инерции нагрузки. Сумматор 3 образует на своем выходе сигнал суммы ошибки системы, скорости и ускорения выходного вала с заданными -весовыми коэффициентами, что позволяет получить необходимую мику электропривода при некотором фиксированном значении отношения . жесткости С к моменту инерции нагрузки I. Блок 4 деления, реализующий звено с переменным коэффициентом усиления, в сочетании с сумматором 5, суммирующим сигнал с выхода блока 4 деления с сигналом положительной обратной связи по скорости выходного вала, стабилизируют динамические характеристики электропривода при изменении С и I, Изменение жесткости
5 редуктора С и/или момента.инерции нагрузки I компенсируется соответствующим изменением коэффициента пе р едачи блока 4 деления обратно пропорционального оценке соответствен0
0
5
0
но отногаения С/1, а общий коэффициент передачи не зависит от С и I. Автоматическую оценку отношения
Q
-- обеспечивает идентификатор, представляющий собой настраиваемую мо- дель упругой механической передачи с моментом инерции нагрузки. Иден - тификатор состоит из сумматора 13, блока 14 умножения, сумматора 15, интегратора 16, сумматора 17, интегратору 18, сумматора 19, блока 20 умножения и интегратора 21. На второй вход сумматора 13 подается сигнал управления, подаваемый одновременно на блок 8 регулирования скорости. На другой вход сумматора 13 подается сигнал скорости выходного вала электропривода. Так как блок 8 регулирования скорости настраивается на максимальное быстродействие, то сигнал скорости вала двигателя 9 в режиме слежения практически совпадает с сигналом управления. Сигнал на выходе сумматора 13 характеризует скорость закрутки выходного вала редуктора объекта 10 относительно вала двигателя 9. Этот сигнал подается на блок 14 умножения.
10
15
20
25
выходе интегратора 21 имеется сиг нал, пропорциональный отношению жесткости редуктора объекта 10 к моменту инерции нагрузки. С выход интегратора 21 сигнал оценки
С
--- поступает на вход делителя б ка 4 деления.
Пусть момент инерции нагрузк и/или жесткость редуктора изменились, например С/1 уменьшилось. В ходной вал электропривода замедля ет свое движение, и сигнал, посту пающий с выхода интегратора 18 на первый вход сумматора 9, не раве сигналу скорости выходного вала, постзшающего на второй вход сумма тора 19. На его выходе появляетс отрицательный сигнал ошибки, кото .рый подается на входы сумматоров и 17. В результате действия сигна ошибки сигналы на выходе интеграт ров 16 и 18 начинают изменяться т ким образом, чтобы сигнал на выхо интегратора 18 стремился сравнять с сигналом скорости выходного вал электропривода, а величина сигнал ошибки стремилась к нулю. Одновре менно отрицательный сигнал ошибки
ог
Коэффициент передачи блока 14 умноже- через блок 20 умножения поступает
выходе интегратора 21 имеется сигнал, пропорциональный отношению жесткости редуктора объекта 10 к моменту инерции нагрузки. С выхода интегратора 21 сигнал оценки
С
--- поступает на вход делителя блока 4 деления.
Пусть момент инерции нагрузки и/или жесткость редуктора изменились, например С/1 уменьшилось. Выходной вал электропривода замедляет свое движение, и сигнал, поступающий с выхода интегратора 18 на первый вход сумматора 9, не равен сигналу скорости выходного вала, постзшающего на второй вход сумматора 19. На его выходе появляется отрицательный сигнал ошибки, кото- .рый подается на входы сумматоров 15 и 17. В результате действия сигнала ошибки сигналы на выходе интеграторов 16 и 18 начинают изменяться таким образом, чтобы сигнал на выходе интегратора 18 стремился сравняться с сигналом скорости выходного вала электропривода, а величина сигнала ошибки стремилась к нулю. Одновременно отрицательный сигнал ошибки
через блок 20 умножения поступает
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1985 |
|
SU1277065A1 |
| Электромашинный следящий привод | 1973 |
|
SU541144A1 |
| Самонастраивающаяся система управления | 1987 |
|
SU1462242A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| Следящий электропривод с переменным моментом инерции | 1987 |
|
SU1406565A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2397529C2 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2460110C1 |
| Самонастраивающаяся система управления | 1979 |
|
SU845143A1 |
| Следящий электропривод с переменным моментом инерции | 1981 |
|
SU1004964A1 |
| Адаптивный следящий электропривод | 1988 |
|
SU1500991A1 |
Изобретение относится к области автоматического управления и может быть использовано в следящих элект.роприводах для приведения в движение различных механизмов с механическими передачами с переменной жест- к ocтью и с нагрузкой с переменньм моментом инерции, например, в робототехнике. Целью изобретения является расширение области применения электропривода. Устройство содержит сумматоры 1,3,5,13,15,17,19, регулятор положения 2, блок регулирования скорости 8, двигатель 9, объект управления 10 с упругим редуктором, блок деления 4, датчик положения 11, блоки определения скорости 22 и ускорения 23, блоки умножения 14, 20, интеграторы 18, 16, 21. Самонастраивающийся следящий электропривод представляет собой устройство, в котором обеспечивается автоматическая оценка отношения жесткости механической передачи к моменту инерции нагрузки и перестройка параметров электропривода таким образом, чтобы компенсировать изменение жесткости механической передачи.и момента инерции нагрузки, благодаря чему электропривод становится работоспособным и его динамические характеристики стабилизируются при переменных жесткости механической передачи и моменте инерции нагрузки. 1 ип. I (Л со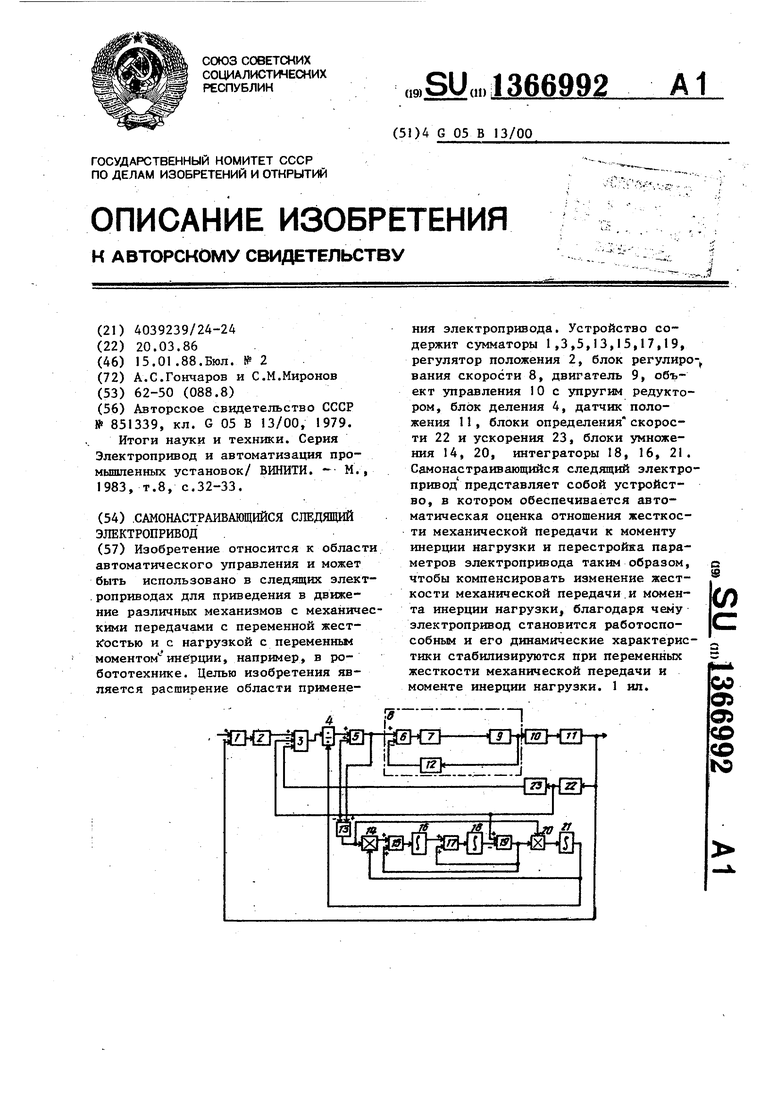
ния ,по первому входу определяется
. .л
С сигналом оценки , подаваемым на
второй вход блока 14 умножения с выхода интегратора 21. В результате на выходе блока 14 з ножения образуется сигнал, который в установившемся жиме характеризует производную от ускорения (рьшок) электропривода. Этот сигнал, пройдя через последовательно соединенные сумматор 15, интегратор 16 и сумматор 17, поступает на вход интегратора 18, на выходе которого образуется сигнал, характеризующий скорость в модели. Этот сигнал поступает-на вход сумматора 19, где сравнивается с сигналом скорости выходного вала электропривода. После окончания переходного процесса в идентификаторе динамические процессы в идентификаторе совпадают с.динамическими процессами в упругой механической переда.че с инерционной нагрузкой. При .этом сигнал, характеризующий отклонение скорости модели от скорости выходного вала электропривода, образующийся на выходе сумматора 19, равен нулю. На
на вход интегратора 21 и сигнал на его выходе начинает уменьшаться, уменьшая коэффициент передачи блока 14 умножения по первому входу. Процесс продолжается до -тех пор, пока сигнал на выходе интегратора 21 не становится пропорциональным новому отношению жесткости редуктора к моменту инерции нагрузки. В этом случае процессы в идентификаторе и в идентифицируемой части электропривода опять одинаковые, а сигнал ошибки на выходе сумматора I9 равен нулю.
л Новый сигнал --посту0
5
пает на блок 4 деления и компенсирует изменение отношения С/1, стабилизируя общий коэффициент передачи к изменению параметров С и I. При увеличении отношения жесткостл механической передачи к моменту инерции нагрузки электропривод работает аналогично.
Электропривод работоспособен и обеспечивает стабилизированные динамические характеристики при изменении жесткости редуктора и момента г инерции нагрузки.
Формула изобретения
Самонастраивающийся следящий электропривод, содержащий первый сумматор, подключенный первым входом к входу задания самонастраивающегося следящего электропривода, регулятор положения, блок регулирования скорости, объект управления, датчик положения, второй, третий и четвертый, сумматоры, первый и второй блоки умножения, первый и второй интеграторы, причем выход блока регулирования скорости соединен с входом объекта управления, выход которого через датчик положения подключен к второму входу первого сумматора, подключенного выходом к входу регулятора положения, выход .второго сумматора подключен к первому входу первого блока умножения и второму входу второго блока умножения, подключенного выходом к входу второго интегратора, выход которого соединен с вторым входом первого блока умножения, выход третьего сумматора соединен через первый интегратор с первым входом четвертого сумматора, подключенного выходом к первому входу третьего сумматора и первому входу второго блока умножения, о тл ич ающийс я тем, что, с целью расширения области примене66992. «
ния электропривода, в него дополнительно введены пятьй, шестой и седьмой сумматоры, блок деления,
g третий интегратор, блок определения ускорения и блок определения скорости, вход которого подключен к выходу датчика положения, а выход - к входу блока определения ускорения,
10 подключенного выходом к третьему входу пятого сумматора, выход которого соединен с входом делимого блока деления, подключенного выходом к первому входу шестого сумматора,
15 выход которого подключен к входу блока регулирования скорости и второму входу второго сумматора, подключенного первым входом к второму входу четвертого сумматора, входу
20 блока определения ускорения, второму входу шестогосумматора и второму входу .пятого сумматора, первый вход которого подключен к выходу регулятора положения, вход де25 лителя блока деления соединен с вторым входом первого блока умножения, подключенного выходом к первому входу седьмого сумматора, второй вход которого соединен с первым
30 входом третьего сумматора, второй вход которого подключен к ,выходу третьего интегратора, подключенного входом к выходу седьмого сумматора.
| Самонастраивающаяся система управления | 1979 |
|
SU851339A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Итоги науки и техники | |||
| Серия Электропривод и автоматизация промышленных установок/ ВИНИТИ | |||
| М | |||
| , 1983, т.8, с.32-33. | |||
