со
О5 05 СО
со
05
N)
чин, в частности к средствам стабилизации линейной скорости ленточного материала при его перемотке с подающего на приемный барабан, может быть использовано при записи и воспроизведении информации на ленточном носителе в технологических процессах изготовления и обработки ленточного материала и является усовершенствованием устройства по авт.свид.№ 1146633 Цель изобретения - повьппение точности регулирования.линейной скорости ленточного материала за счет совместного регулирования скорости движения и величины натяжения ленточного материала. Для этого устройство для регулирования линейной скорости ленточного материала содержит приемньй 1
и подающий 2 барабаны с ленточным материалом 3, генератор 4 импульсов опорной частоты, задатчик 5 опорного сигнала, датчик 6 угловой скорости, счетчики 7, 10, квадраторы 9, 11, сумматор 12, цифроаналоговый преобразователь 13, блок 14 сравнения, блоки 15, 21 управления, электродвигатели 16, 22, амплитудный детектор
17,аналого-цифровой преобразователь
18,вьзделители 19, 24 приращения, перемножающий цифроаналоговый преобразователь 20, датчик 23 натяжения, а каждый вьщелитель приращения содержит сумматор 25 (27) и элемент 2бС28)за- держки. Изобретение позволяет повысить точность регулирования скорости ленточного материала до О,1-0,2%.2ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования линейной скорости ленточного материала | 1987 |
|
SU1453368A1 |
| Устройство для регулирования линейной скорости ленточного материала | 1987 |
|
SU1539736A1 |
| Устройство для регулирования линейной скорости ленточного материала | 1988 |
|
SU1619239A2 |
| Устройство для регулирования линейной скорости ленточного материала | 1984 |
|
SU1229734A2 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ЛЕНТОЧНОГО МАТЕРИАЛА | 2016 |
|
RU2626735C1 |
| Устройство для перемещения магнитной ленты | 1990 |
|
SU1697113A1 |
| Устройство для управления скоростью перемещения магнитной ленты | 1984 |
|
SU1229815A1 |
| Радиоприемное устройство с плавным управлением амплитудой размывающего сигнала | 2024 |
|
RU2835059C1 |
| Устройство для перемещения магнитной ленты | 1990 |
|
SU1705865A1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА СИГНАЛОВ, ПРЕДСТАВЛЕННЫХ ПАРАМЕТРАМИ СТУПЕНЧАТОГО МОДУЛЯЦИОННОГО РАЗЛОЖЕНИЯ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2584462C2 |

Изобретение относится к технике регулирования незлектрических велис сл
1
Изобретение относится к устройствам для регулирования неэлектрических величин, в частности к средствам стабилизации линейной скорости ленточного материала при его перемотке с подающего на приемный барабан, и может быть использовано при записи и воспроизведении информации на ленточном носителе в технологических про- цессах изготовления и обработки ленточного материала и т.д.
Цель изобретения - повышение точности регулирования линейной скорости ленточного материала за счет совместного регулирования скорости движения и величины натяжения ленточног материала.
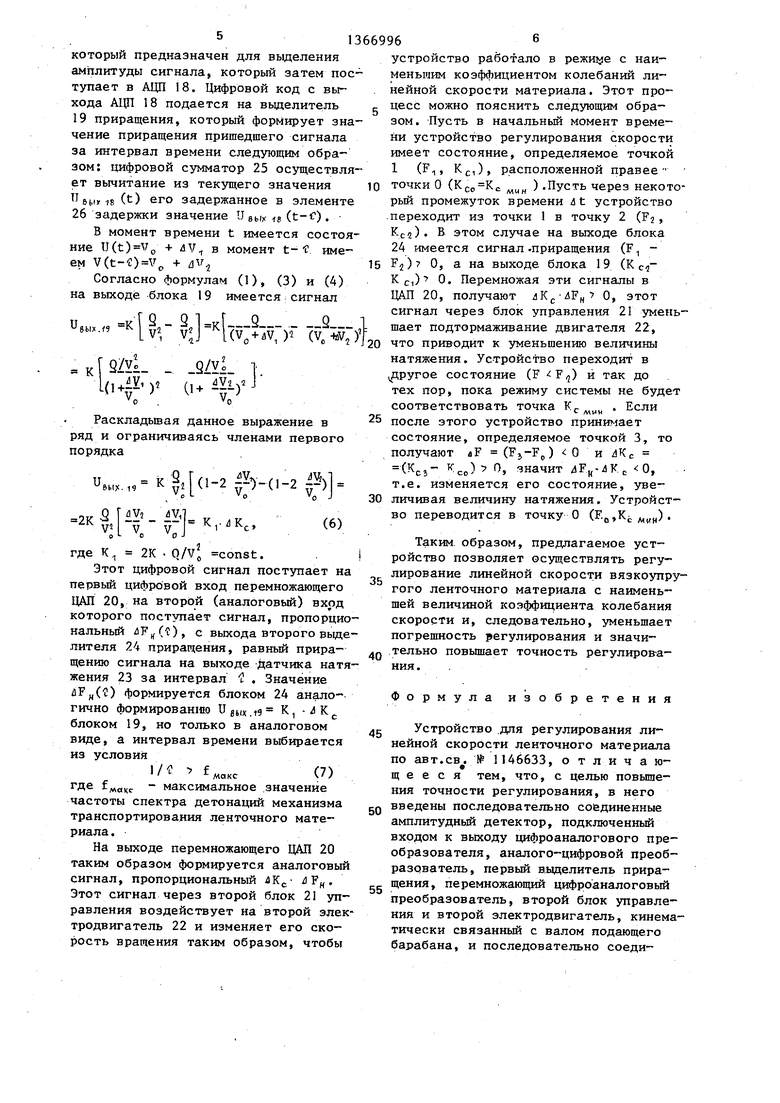
На фиг.1 приведена структурная схма устройства; на фиг.2 - график зависимости коэффициента колебаний скорости от величины натяжения.
Устройство содержит приемный 1 и подающий 2 барабаны с ленточньм материалом 3, генератор 4 импульсов опорной частоты, задатчик 5 опорного сигнала, последовательно соединенные первый датчик 6 угловой скорости приемного барабана 1, первый счетчик 7 и первый квадратор 8, последовательно соединенные второй датчик 9 угловой скорости подающего барабана , второй счетчик 10, второй квадратор
11, сумматор 12, цифроаналоговый преобразователь (ЦАП) 13, блок 14 сравнения, первый блок 15 управления и первый электродвигатель 16-, кинематически связанньш с валом приемного барабана ,1 . Устройство также включает последовательно соединенные амплитуд- ньй детектор 17, аналого-цифровой преобразователь (АЦП) 18, первый выделитель 19 приращения, перемножающий ЦАП 20, второй блок 21 управления и второй электродвигатель 22, кинематически связанный с валом подающего барабана, а также последовательно соединенные датчик 23 натяжения, механически контактирующий с ленточным материалом 3 и второй выделитель 24 приращения.При этом выход; генератора 4 соедршен с вторыми входами счетчиков 7 и 10, выход первого квадратора 8 - с вторым входом блока сравнения 14, вход амплитудного детектора 17 - с выходом ЦАП 13, выход второго вьзделителя 24 - с вторым входом перемножающего ЦАП 20. При этом первый вьвделитель 19 состоит из цифрового сумматора 25 и элемента 26 задержки, соединенных так, что первый вход сумматора 25 и вход элемента 26 явля- ются входом вьщелителя 19, выход сумматора 25 - выходом вьщелителя 19, а выход элемента 26 соединен с вто
рым входом цифрового сумматора 23. Второй (аналоговьш) выделитель 24 состоит из аналогового сумматора 27 и элемента 28 задержки, соединенных так, что первый вход сумматора 27 и элемента 28 являются входом блока 24 выход сумматора 27 - выходом блока 24, а выход элемента 28 соединен с вторым входом сумматора 27.
Устройство работает следующим образом.
Датчики 6 и 9 преобразуют угловые скорости приемного 1 и подающего 2 барабанов с ленточным материалом 3 в последовательность импульсов, частота которых пропорциональна скоростям приемного 1 и подающего 2 барабанов. Счетчики 7 и 10 суммируют количество имупльсов, вырабатьшаемых генератором 4 импульсов опорной частоты, успевающих поступить на них за период между импульсами, приходящими с датчиков 6 и 9 соответственно.
Таким образом, .на выходах счетчиков 7 и 10 устанавливаются коды чисел, пропорциональные мгновенным значениям периодов вращения приемного 1 и подающего 2 барабанов. С учетом связи, между мгновенными значениями угловых скоростей и мгновенными периодами вращения (T 2lF/co) на выходах счетчиков устанавливаются числовые значения l/Wj, величины которых обратно пропорциональны величинам угловых скоростей приемного 1 и подающего 2 барабанов соответственно Сигналы, полученные с выходов счетчиков 7610, возводятся в квадрат в блоках В и 11, на выходах которых таким образом устанавливаются коды чисел, величины которых обратно пропорциональны квадратам угловых скоростей приемного 1 и подающего 2 барабанов соответственно. Эти коды суммируются в сумматоре 12, на выходе которого формируется код, пропорцио- нальньй сумме величин, обратных квадратам мгновенных значений угловых - скоростей приемного 1 и подающего 2 барабанов, т.е. выходной сигнал сумматора 12
и
вых. 11
(Ь
Ь ).
ш
(1)
1
где К cons.t;
О), и иЗл- мгновенные значения угловых скоростей приемного 1 и подающего 2 барабанов с ленточным материалом.
Код с выхода сумматора 12 подается на ЦАП 13, где преобразуется в аналоговый сигнал. Этот сигнал поступает на первый вход блока 14 сравнения, на второй вход которого поступает сигнал с эадатчика 5 с
и
SblT
п
(2)
5
где V - номинальное значение линей-
С
ной скорости ленточного материала ; с const.
Между мгновенными угловыми ско- ростяйи ы, и w, и мгновенным значением линейной скорости ленточного материала V существует известная зависимость (1):
1
1
-- ч- .-
(л) , - W ,
О
VI
(3)
где О const, определяемая параметрами механизма перемещения ленточного материала.
Таким образом, из (1) -,(3) видно, что если скорость ленточного материала V не равна номинальной ) выходе блока 14 сравнения -возникает сигнал рассогласования, который через первьй блок 15 управления воздействует на первый злек- тро.двигатель 16, меняя скорость его вращения до исчезновения сигнала рассогласования на выходе блока 14, при этом линейная скорость V ленточного материала 3 становится равной номинальной скорости VQ.
Но при использовании вязкоупругих ленточных материалов изменение величины натяжения вызьшает изменение величины линейной скорости, и наоборот. Исследования (2) показали, что зависимость коэффициента колебания скорости
К, - .(4)
где 4V - амплитуда отклонения скорости V от номинального значения v от величины натяжения имеет вид, приведенный на фиг.2. Из фиг.2 видно,
что на характеристике имеется точка с наименьшим значением KC К , «тз которой колебания скЬрости происходят с минимальной амплитудой.
Предлагаемое устройство осущест-
вляет автоматическое поддержание
Это происходит следующим обра
V
С
ЗОМ.
Аналоговый, сигнал с выхода ЦАП 13 подает(я на амплитудный детектор 17,
амплитуды сигнала, который затем пос-- тупает в АЦП 18. Цифровой код с выхода АЦП 18 подается на вьоделитель 19 приращения, который формирует значение приращения пришедшего сигнала за интервал времени следующим образом: цифровой сумматор 25 осуществляет вычитание из текущего значения 6М1Г18 (t) sr-o задержанное в элементе 26 задержки значение IJ вых 8 (t-f) .
В момент времени t имеется состояние U(t)Vo + йЧ в момент t--С имеем V(t- C)Vp + uV
Согласно формулам (1), (3) и (4) на выходе блока 19 имеется сигнал
10
15
меньшим коэф)ициентом колебаний линейной скорости материала. Этот процесс можно пояснить следующим образом. Пусть в начальный момент времени устройство регулирования скорости имеет состояние, определяемое точкой 1 (F, Kj,,), расположенной правее- точки О ( у ) .Пусть через некоторый промежуток времени 4t устройство .переходит из точки 1 в точку 2 (Fj KC). В этом случае на выходе блока 24 имеется сигнал-приращения (F., - Fj)7 О, а на выходе блока 19 (К с Kci) 0. Перемножая эти сигналы в
ЦАП 20, получают лК
й,У
о, этот
сигнал через блок управления 21 умень- бы.. () (Лгу}, подтормаживание двигателя 22,
120 что приводит к уменьшению величины натяжения. Устройство переходит в другое состояние (F ) и так до тех пор, пока режиму системы не будет соответствовать точка У-с w Если
9/YL
(1
9/Yi Т
+ Yl) Раскладьшая данное выражение в ряд и ограничиваясь членами первого порядка
.„.„-к |,(,-2Я,.(,.2|55,. ...V,L,,,, (6)
с О
где К 2К . Ojvl const. .
Этот цифровой сигнал поступает на первый цифровой вход перемножающего ЦАП 20, на второй (аналоговый) вход которого поступает сигнал, пропорциональный iF|(), с выхода второго вьще- лителя 24 прирагдения, равный приращению сигнала на выходе датчика натяжения 23 за интервал ь . Значение лР„(;) формируется блоком 24 аналогично формированию и 81Д 19 К,
блоком 19, но только в аналоговом виде, а интервал времени выбирается из условия
1/
f
(7)
макс
где максимальное .значение частоты спектра детонаций механизма транспортирования ленточного материала.
На выходе перемножающего ЦАП 20 таким образом формируется аналоговый сигнал, пропорциональный лК.- л F . Этот сигнал через второй блок 21 управления воздействует на второй электродвигатель 22 и изменяет его скорость вращения таким образом, чтобы
меньшим коэф)ициентом колебаний линейной скорости материала. Этот процесс можно пояснить следующим образом. Пусть в начальный момент времени устройство регулирования скорости имеет состояние, определяемое точкой 1 (F, Kj,,), расположенной правее- точки О ( у ) .Пусть через некоторый промежуток времени 4t устройство .переходит из точки 1 в точку 2 (Fj KC). В этом случае на выходе блока 24 имеется сигнал-приращения (F., - Fj)7 О, а на выходе блока 19 (К с Kci) 0. Перемножая эти сигналы в
ЦАП 20, получают лК
й,У
о, этот
сигнал через блок управления 21 умень- подтормаживание двигателя 22,
что приводит к уменьшению величины натяжения. Устройство переходит в другое состояние (F ) и так до тех пор, пока режиму системы не будет соответствовать точка У-с w Если
после этого устройство принимает
состояние, определяемое точкой 3, то получают У (Fj-Fp) О и /)Кс (Кс5 ) значит 0, . т.е. изменяется его состояние, увеличивая величину натяжения. Устройство переводится в точку О (F.o,Kj, д,ин)
Таким, образом, предлагаемое устройство позволяет осуществлять регулирование линейной скорости вязкоупру- гого ленточного материала с наименьшей величиной коэффициента колебания скорости и, следовательно, уменьшает погрешность регулирования и значительно повьш1ает точность регулиров-а- ния.
Формула изобретения
с Устройство для регулирования линейной скорости ленточного материала по авт.св. № 1146633, отличающееся тем, что, с целью повышения точности регулирования, в него
Q введены последовательно соединенные амплитудньй детектор, подключенный входом к выходу цифроаналогового преобразователя, аналого-цифровой преоб- разрватель, первый в.ыделитель прира- щения, перемножающий цифроаналоговый преобразователь, второй блок управления и второй электродвигатель, кинематически связанный с валом подающего барабана, и последовательно соединенные датчик натяжения, механически связаиный с ленточным материалом, и второй выделитель приращения, подклюфие1
ченный выходом к второму входу перемножающего цифроаналогового преобразователя.
fft
| Willian Н | |||
| Ohm | |||
| Reel-toreel drive flesign for a cassete recorder,- Computer Design, 1973, v 12, p.67-70 | |||
| Навицкас A.И | |||
| Некоторые вопросы динамики тракта магнитных головок и точности передачи информации | |||
| - В кн.: Вибротехника: Труды вузов Лат.ССР | |||
| - | |||
| Каунас, 1969, вып.2(7), с.143-147, Справочник по интегральным микросхемам / Под ред | |||
| Ё.В.Тарабрина, - М.:.Радио и связь,,1983 | |||
| Богатин Л.В., Таранчук А.И., Полянский Ю.В, О возможных способах управления пьезоэлектрическими двигателями в устройствах магнитной записи | |||
| - В кн.: Вопросы синтеза динамических систем: Межвузовский сборник, ЛИАП, 1982 | |||
| Устройство для измерения силы натяжения ленты | 1975 |
|
SU559141A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Устройство для управления скоростью перемещения магнитной ленты | 1980 |
|
SU881850A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Устройство для управления скоростью перемещения магнитной ленты | 1981 |
|
SU995118A2 |
| Авторское свидетельство СССР № 1146633, кл.С 05 D 13/62, 1983 | |||
