СО О5
to
IsD
1
Изобретение относится к электротехнике, S частности к электроприводам, построенным на основе асинхронных двигателей и тиристорных преобра зователей переменного напряжения, и может быть использовано в нерегулиру мых по скорости асинхронных электроприводах различного назначения.
Целью изобретения является умень- шение потерь электроэнергии за счет стабилизации коэффициента мощности асинхронного электродвигателя.
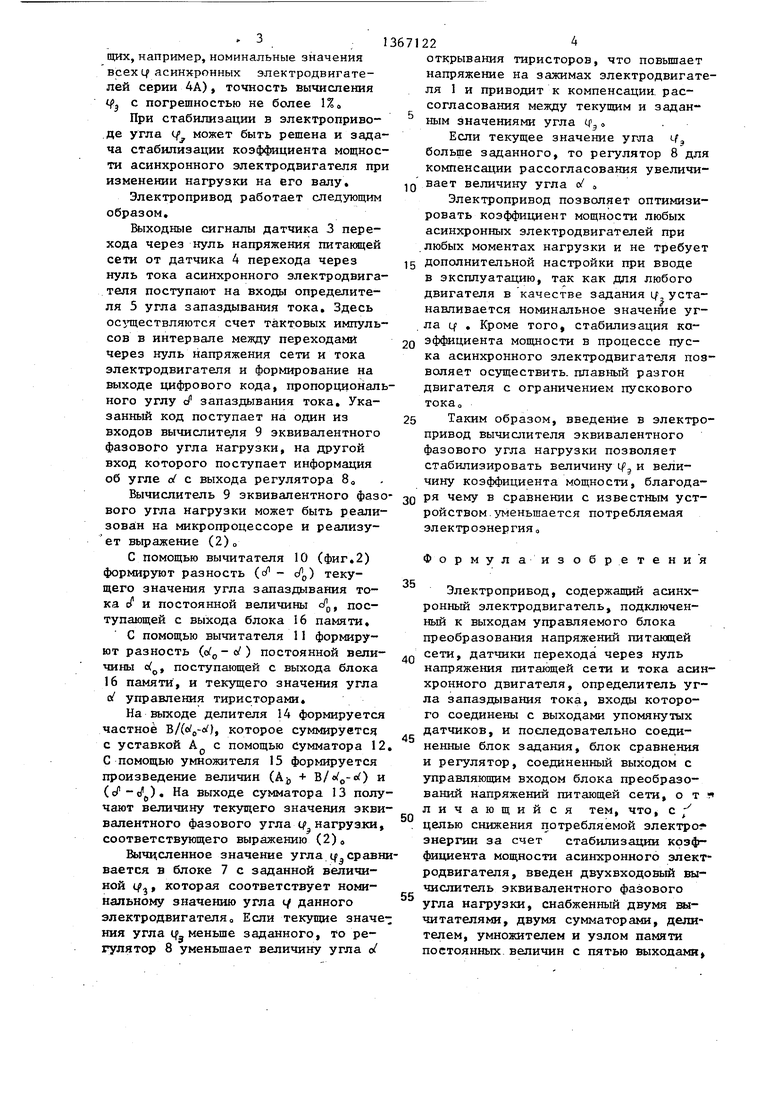
На фиго представлена функциональная схема электропривода; на фиг,2 - схема вычислителя эквивалентного фазового угла нагрузки; на фиг,3 - диаграммы напряжения и тока в цепи нагрузки тиристорного преобразователя напряжения.
Электропривод содержит асинхронны электродвигатель 1 (фиг,1), подключеный к выходам управляемого блока 2 преобразования напряжений питающей сети, датчик 3 перехода через нуль напряжения питающей сети и датчик
4перехода через нуль тока асинхронного электродвигателя, определитель
5угла запаздыва1шя тока и последовательно сое,циненные блок 6 задания, блок 7 сравнения и регулятор 8, соединенный выходом с управляющим входом блока 2 преобразований напряжений питающей сети,
В электропривод введен двухвходо- вый вычислитель 9 эквивалентного фазового угла нагрузки, снабженный двумя вычитателями 10 и 11 (фиг,2), двумя сумматорами 12 и 13, делителем 14, умножителем 15 и узлом 16 памя- ти постоянных величин с пятью выходами .
Первые входы вычитателей 10 и 11 образуют входы вычислителя 9 эквивалентного фазового угла нагрузки, под ключенные соответственно к выходу определителя 5 угла запаздывания тока и к выходу регулятора 8, Выходы вычитателей 10 и 11 подключены к первым входам умножителя 15 и делителя 14 соответственно. Выход делителя 14 подключен к первому-входу сумматора 12, соединенного выходом с вторым входом умножителя 15, выход которого подключен к первому входу сумматора
13о
Соответствующие выходы узла 16 памяти постоянных величин подключены к вторым входам вычитателей 10 ,
1222
и 11, делителя 14 и сумматоров 12 и 13о Выход сумматора 13, образующий выход вычислителя 9 эквивалентного фазового угла нагрузки, подключен к другому входу блока 7 сравнения.
Функционирование электропривода основано на следующем,,
Соотношение между индуктивным Х и активным R сопротивлениями цепи протекания тока при синусоидальном напряжении питания характеризует фазовый угол Lf нагрузки 4 arctg При этом величина cos tp равна коэффициенту мощности Кд, определяемому как отношение активной и реактивной мощностей, т,е, .Кд, R/S,
При питании асинхронного электродвигателя от тиристорного.преобразователя переменного напряжения (содержащего в каждой фазе встречно-параллельно включенные тиристоры) ток i через нагрузку становится прерывистым и несинусоидальным и отстает от напряжения U на угол о/ открывания тиристоров (фиГоЗ), Длительность Л протекания тока через тиристор в каждом полупериоде, а следовательно, и угол cf запаздывания тока зависят в этом случае от некоторых эквивалентных приведенных к входу электродвигателя значений сопротивлений и RJ, которые определяют эквивалентный фазовый угол (f нагрузки,.
ц) arctg ,
(1)
Величины X(j, R j и g; зависят от положения рабочей точки на механических характеристиках и определяют коэффициент мощности нагрузки
Упрощенное выражение, связывающее величины (f к cf с углом открывания тиристоров У ,имеет вид
. (А +
В
of,-о/
)(J -(/o) , (2)
где ц , с/д- координаты точки пересечения зависимостей (/ f() при фиксированных значениях о (оС const); ol - граничный угол открывания тиристоров; - безразмернь коэффициент В - коэффициент с размерностью, эл,град,
Шражение (2) обеспечивает в диа пазоне углов 20-50 (перекрываю
- 3 . 1 щих, например, номинальные значения всех у асинхронных электродвигателей серии 4А), точность вычисления if с погрешностью не более 1%о
При стабилизации в электроприво- .де угла может быть решена и задача стабилизации коэффициента мощности асинхронного электродвигателя при изменении нагрузки на его валу.
Электропривод работает следующим образом.
Выходные сигналы датчика 3 перехода через нуль напряжения питакщей сети от датчика 4 перехода через нуль тока асинхронного электродвигателя поступают на входы определителя 5 угла запаздывания тока. Здесь ос тцествляются счет тактовых импульсов в интервале между переходами через нуль напряжения сети и тока электродвигателя и формирование на выходе цифрового кода, пропорционального углу {/ запаздывания тока. Указанный код поступает на один из входов вычислителя 9 эквивалентного фазового угла нагрузки, на другой вход которого поступает информация об угле of с выхода регулятора 8 о
Вычислитель 9 эквивалентного фазо вого угла нагрузки может быть реали- зова;н на микропроцессоре и реалиэу- ет вьфажение (2),,
С помощью вычитателя 10 (фиг.2) формируют разность (с/ - с/ ) текущего значения угла запаздывания тока tf и постоянной величины c/J,, поступающей с выхода блока 16 памяти.
С помощью вычитателя 11 формируют разность ( - с/) постоянной величины о, поступающей с выхода блока 16 памяти, и текущего значения угла « управления тиристорами.
На выходе делителя 14 формируется частное B/(o/j,-o), которое суммируется
с уставкой А с помощью Сумматора 12. С помощью умножителя 15 формируется произведение величин (Aj, + B/«/o-of) и (c -t/ g). На выходе сумматора 13 получают величину текущего значения эквивалентного фазового угла If нагрузки, соответствующего выражению (2)
Вычцсленное значение угла if сравнивается в блоке 7 с заданной величиной IfJ f которая соответствует номинальному значению угла i/ данного электродвигателя о Если текущие значения угла qij меньше заданного, то регулятор 8 уменьшает величину угла а
g о 5
Q
5
0
5
22
открывания тиристоров, что повьппает напряжение на зажимах электродвигателя 1 и приводит к компенсации, рассогласования между текущим и заданным значениями угла (( о.
Если текущее значение угла i-fj больще заданного, то регулятор 8 для компенсации рассогласования увеличивает величину угла о/ „
Электропривод позволяет оптимизировать коэффициент мощности любых асинхронных электродвигателей при любых моментах нагрузки и не требует дополнительной настройки при вводе в эксплуатацию, так как для любого двигателя в качестве задания i, устанавливается номинальное значение угла cf . Кроме того, стабилизация коэффициента мощности в процессе пуска асинхронного электродвигателя позволяет осуществить, плавный разгон двигателя с ограничением пускового тока о
Таким образом, введение в электропривод вычислителя эквивалентного фазового угла нагрузки позволяет стабилизировать величину if и величину коэффициента мощности, благодаря чему в сравнении с известным устройством, уменьшается потребляемая электроэнергия о
Формулаизобретени я
Электропривод, содержащий асинхронный электродвигатель, подключенный к выходам управляемого блока преобразования напряжений питающей сети, датчики перехода через нуль напряжения питающей сети и тока асинхронного двигателя, определитель угла запаздывания тока, входы которого соединены с выходами упомянутых датчиков, и последовательно соединенные блок задания, блок сравнения и регулятор, соединенный выходом с управляющим входом блока преобразований напряжений питающей сети, о т т личающийся тем, что, с ; целью снижения потребляемой электрод- энергии за счет стабилизации коэффициента мощности асинхронного электродвигателя, введен двухвходовый вычислитель эквивалентного фазового угла нагрузки, снабженный двумя ил- читателями, двумя сумматорами, делителем, умножителем и узлом памяти постоянных величин с пятью выходами
51
при этом первые входы первого и второго аычитателей образуют входы вычислителя эквивалентного фазового угла нагрузки, подключенные соответственно к выходу определителя угла запаздывания тока и к выходу регулятора, выходы первого и второго вы- читатепей подключены к первым входам умножителя и делителя, выход которого подключен к первому входу первого сумматора, соединенного выхо
671226
дом с вторым входом умножителя, выход которого подключен к первому входу второго сумматора, соответствую- с щие вькоды.узла памяти постоянных величин подключены к вторым входам вычитателей, делителя и сумматоров, причем выход второго сумматора, образующий выход вычислителя зквивалент- 10 ного фазового угла нагрузки, подключен к другому входу блока сравнения.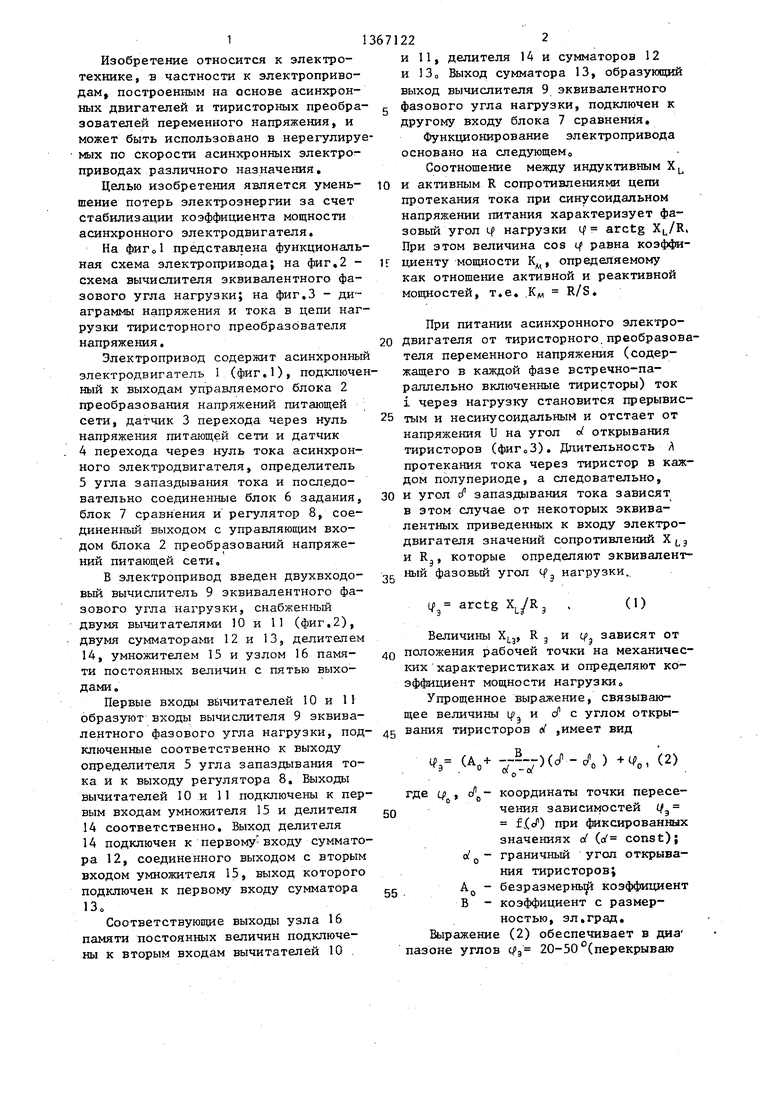
| название | год | авторы | номер документа |
|---|---|---|---|
| АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ЭКСТРЕМАЛЬНЫМ УПРАВЛЕНИЕМ | 1992 |
|
RU2069032C1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1347142A1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1374392A1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| Устройство для управления асинхронным частотно-регулируемым электродвигателем | 1990 |
|
SU1793526A1 |
| Вентильный электродвигатель | 1983 |
|
SU1141526A1 |
| Асинхронный электропривод | 1990 |
|
SU1767690A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ДВИГАТЕЛЕМ С СИСТЕМОЙ ПРЕДИКТИВНОГО УПРАВЛЕНИЯ МОМЕНТОМ | 2024 |
|
RU2829212C1 |
| Электропривод | 1982 |
|
SU1072225A1 |

Изобретение относится к электротехнике. Целью изобретения является уменьшение потерь электроэнергии за счет1ст илизации коэффициента мощности асинхронного двигателя. Указанная цель достигается введением в электропривод вычислителя 9 эквивалентного фазового угла нагрузки. Входы вычислителя 9 подключены соответственно к выходу определителя 5 угла запаздывания тока и к выходу регулятора 8. Выход вычислителя 9 соединен с одним из входов блока 7 сравнения. Электропривод позволяет оптимизировать коэффициент мощности асинхронного двигателя при любых моментах нагрузки и не требует дополнительной настройки при эксплуатации. Стабилизация коэффициента мощности в процессе пуска асинхронного двигателя позволяет осуществить плавный разгон с ограничением пускового тока. 3 ил. I (Л
фие.г
фигЗ
| Патент США № 4298834, кло 318- 729, 1981 Заявка Англии № 2120422, кл, G 05 F 1/70, 1983. |
