Изобретение относится к электротехнике, а точнее к автоматическим устройствам для управления электроприводами переменного тока, и может быть использовано в системах регулируемого асинхронного электропривода в текстильной промышленности и в других отраслях народного хозяйства.
Известно устройство для управления асинхронным частотно-регулируемым электродвигателем, содержащее инвертор напряжения, выходы которого предназначены для подключения к упомянутому электродвигателю, блок управления частотой и модулем напряжения, вход которого подключен к выходу блока задания вектора напряжения, входами соединенного с соответствующими выходами преобразователя координат, последовательно соединенные блок задания потокосцепления, первый блок сравнения, регулятор потокосЦепле- ния, второй блок сравнения, регулятор намагничивающей составляющей тока статора, последовательно соединенные блок задания частоты вращения, задатчик интенсивности, третий блок сравнения и регулятор активной составляющей тока статора; выход которого и выход и регулятора намагничивающей составляющей тока статора подключены к первым двум входам преобразователя координат, преобразователь числа фаз, вычислитель модулей со- ставля ющих тока статора, вьУйй слитёль модуля потокосцепления, модель механической передачи, модель исполнительного ме- ханизма и модель асинхронного электродвигателя с двумя фазными цепями.
Недостатком устройства является конструктивная сложность системы управления, невысокая надежность и невысокое качество регулирования частоты вращения, что не позволяет учитывать изменение мо- мента инерции, упругость передачи, нели нейность характеристики преобразователя ; частоты, а также насыщение магнитной системы асинхронного двигателя. :
Наиболее близким техническим решением к изобретению является устройство для управления асинхронным частотно-регулируемым электродвигателем, содержащее инвертор/напряжения, выходы которого предназначены для подключения к упомянутому электродвигателю, блок управления частотой и модулем напряжения, вход которого подключен к выходу блока задания вектора напряжения, входами соединенного с соответствующими выходами преобразователя координат, последовательно соединенные блок задания потокосцепления, первый блок сравнения,
регулятор потокосцепления, второй блок сравнения и регулятор намагничивающей составляющей тока статора, последовательно соединенные блок задания частоты вра- щения, задатчик интенсивности, третий блок сравнения, регулятор частоты вращения, блок деления, четвертый блок сравнения и регулятор активной составляющей тока статора, выход которого и выход рег улятора намагничивающей составляющей тока статора подключены к первым двум входам преобразователя координат, преобразователь числа фаз, вычислитель модулей составляющих тока статора,
5 вычислитель модуля потокосцепления, модель механической передачи, модель испол- нительното механизма и модель асинхронного электродвигателя с двумя фазными цепями, двумя инверторами, дву0 мя сумматорами, двумя блоками перемножения и вычислителем момента, при этом каждая из фазных цепей выполнена по П- образной схем замещения с двумя элементами, моделирующими активные
5 сопротивления статора и ротора и тремя элементами, моделирующими эквивалентные сопротивления взаимоиндуктивности, рассеяния статора и рассеяния ротора, вхо-- ды фазных цепей, образующие первые два
0 входа модели асинхронного электродвигате i ля, объединены с соответствующими входами вычислителя модулей составляющих тока статора и подключены к выходам преобразователя числа фаз, вход первого ин5 вертора и первый вход первого сумматора подключены к выводам элемента, моделирующего эквивалентное сопротивление взаимоиндуктивности в первой фазной цепи, вход второго инвертора и первый вход вто0 рого сумматора подключены к выводам элемента, моделирующего, эквивалентное сопротивление взаимоиндуктивности во второй фазной цепи, выходы первого и вто- : рого сумматоров, подключенных выходами
5 к первым входам второго и первого блоков перемножения соответственно, вторые входы блоков перемножения объединены между собой и образуют третий вход модели асинхронного электродвигателя объединен0 ный с третьим входом преобразователя координат и другим входом третьего блока сравнения и подключенный к выходу модели исполнительного механизма, выходы первого и второго блоков перемножения со5 единены со свободными выводами элементов,моделирующих активное сопротивление ротора соответственно в первой и второй фазных цепях, выходы пер- : вого и второго сумматоров, образующие кроме того первые два выхода модели асинхроиного электродвигателя подключены к входам вычислителя момента и вычислителя модуля потокосцепления, выход которого подключен к четвертому входу преобразователя координат, другому входу блока де- ления и другому входу первого блока сравнения, первые два входа вычислителя момента объединены с соответствующими входами фазных цепей, другие два входа подключены к выходам сумматоров, а выход вычислителя момента, образующий третий выход модели асинхронного электродвигателя, подключен к входу модели механической передачи, соответствующие выходы вычислителя модулей составляющих тока статора подключены к пятому и шестому входам преобразователя координат и к другим входам второго и четвертого блоков сравнения.
Недостатком устройства является невы- сокое качество регулирования частоты вращения, т.к. отсутствуют идентификаторы тока статора по модулю и фазе, что не позволяет корректироать параметры модели в функции ошибки по модулю и фазе тока статора и в модели не учитывается эффект вытеснения тока ротора.
Целью изобретения является повышение точности управления путем корректирования тока статора.
Указанная цель достигается за счет того, что введена модель инвертора напряжения, подключенная входом к выходу блока управления частотой и модулем напряжения, а первым выходом - к входу преобра- зователя числа фаз, сумматор, инвертор напряжения снабжен двумя дополнительными информационными выходами по току и напряжению, а в модель асинхронного электродвигателя введены два фазовых ди- скриминатора, три блока сравнения и пять масштабных усилителей, блок извлечения корня квадратного, третий блок перемножения, два фильтра, а элементы, моделирующие сопротивление ротора в фазных цепях и элементы, моделирующие эквивалентные сопротивления взаимоиндукт.ивности и сопротивления рассеяния ротора выполнены регулируемыми, два входа по току и напряжению первого фазового дискриминатора соединены с соответствующими информационными выходами инвертора напряжения, а его выход через первый блок сравнения модели асинхронного электродвигателя соединен с входами первого и второго масштабных усилителей, второй фазовый дискриминатор соединен входами по току и напряжению с соответствующими информационными выходами модели инвертора напряжения, а его выход соединен со
вторым входом первого блока сравнения модели асинхронного электродвигателя, входы по току первого и второго фазовых дискриминаторов соответственно через первый и второй входы второго блока сравнения модели асинхронного электродвигателя соединены с входами третьего, четвертого и пятого масштабных усилителей, выходы первого и третьего масштабных усилителей подключены к первому и второму входам сумматора, третий вход которого и выход подключены соответственно к выходу модели механической передачи и к входу модели исполнительного механизма, выходы второго и четвертого масштабных усилителей соответственно через первый и второй входы третьего блока сравнения модели асинхронного электродвигателя и первый вход первого фильтра подключены к входам управления элементов, моделирующих сопротивления ротора первой и второй фазных цепей, а выход пятого масштабного усилителя соединен со входами управления элементов, моделирующих эквивалентное сопротивление взаимоиндуктивности в первой и второй фазных цепях, выход третьего блока сравнения подключен к входу блока извлечения корня квадратного и к первому входу третьего блока перемножения, второй вход которого соединен с выходом блока извлечения корня квадратного и входом второго фильтра, выход которого соединен с входами управления элементов, моделирующих эквивалентное сопротивление расселения ротора в первой и второй фазных цепях, а выход третьего блока перемножения соединен со вторым входом первого фильтра.
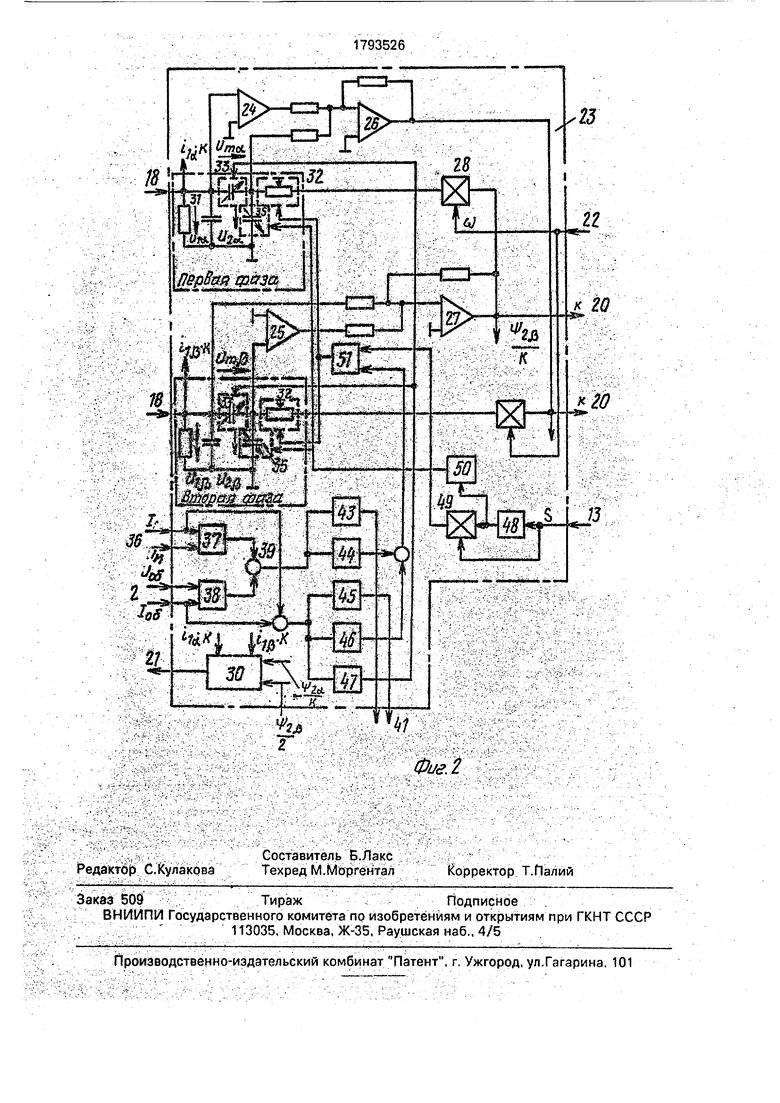
На фиг. 1 приведена функциональная схема предлагаемого устройства; на фиг. 2 - модель асинхронного электродвигателя с идентификаторами тока статора по модулю и фазе.
Устройство для управления асинхронным частотно-регулируемым электродвигателем содержит асинхронный двигатель 1, инвертор 2 напряжения, выходы которого предназначены для подключения к этому электродвигателю, блок 3 управления частотой и модулем .напряжения, вход которого подключен к выходу блока 4 задания вектора напряжения, входами соединенного с соответствующими выходами преобразователя 5 координат, последовательно соединенные блок 6 задания потокосцепления, первый блок 7 сравнения, регулятор 8 потокосцепления, второй блок 9 сравнения и регулятор 10 намагничивающей составляющей тока статора, последовательно соединенные блок 11 задания частоты вращения, задатчик 12
интенсивности, третий блок 13 сравнения, регулятор 14 частоты вращения, блок 15 деления, четвертый блок 16 сравнения и регулятор 17 активной составляющей тока статора, выход которого и выход регулятора намагничивающей составляющей тока статора подключены к первым двум входам преобразователя координат, преобразователь 18 числа фаз, вычислитель 19 модулей составляющих тока статора, вычислитель 20 модуля потокосцепления, модель механической передачи 21, модель исполнительного механизма 22 и модель асинхронного электродвигателя 23 с двумя фазными цепями, двумя инверторами 24, 25, двумя сумматорами 26, 27, двумя блоками 28, 29 перемножения и вычислителем 30 момента. При этом каждая из фазных цепей выполнена по П-образной схеме замещения с двумя элементами, моделирующими активные сопротивления статора 31 и ротора 32, и тремя элементами, моделирующими эквивалентные сопротивления взаимоиндуктивности 33, рассеяния статора 34 и рассеяния ротора 35, входы фазных цепей, образующие первые два входа модели асинхронного двигателя, объединены с соответствующими входами вычислителя модулей составляющих тока ртатора и подключены к выходам преобразователя числа фаз,
Вход первого инвертора 24 и первый вход первого сумматора 26 подключены к выводам элемента, моделирующего эквивалентное сопротивление взаимоиндуктивности в первой фазной цепи, вход второго инвертора 25 и первый вход второго сумматора 27 подключены к выводам элемента, моделирующего эквивалентное сопротивление взаимоиндуктивности во второй фазной цепи, выходы первого и второго инверторов подключены соответственно ко вторым входам первого и. второго сумматоров, подключенных выходами к первым входам второго и первого блоков перемножения соответственно, вторые входы блоков перемножения объединены между собой и образуют третий вход модели асинхронного электродвигателя, объединенный с третьим входом преобразователя координат и другим входом третьего блока сравнения и подключенный к выходу модели исполнительного механизма.
Выходы первого и второго блоков перемножения соединены со свободными выводами элементов, моделирующих активное сопротивление ротора соответственно в первой и второй фазных цепях, выходы первого и второго сумматоров, образующие кроме тбго первые два выхода модели асинхронного электродвигателя подключены к
входам вычислителя момента и вычислителя модуля потокосцепления, выход которого подключен к четвертому входу преобразователя координат, другому входу блока деления и другому входу первого блока сравнения, первые два входа вычислителя момента объединены с соответствующими входами фазных цепей, другие два входа подключены к выходам сумматоров, а выход
0 вычислителя момента, образующий третий выход модели асинхронного электродвигателя, подключен к входу модели механической передачи, соответствующие выходы вычислителя модулей составляющих тока
5 статора подключены к пятому и шестому входам преобразователя координат и к другим входам второго и четвертого блоков сравнения.
В состав модели асинхронного электро0 двигателя входят два фазовых дискриминатора 37, 38, три блока 39, 40, 42 сравнения и пять масштабных усилителей 43-47, блок 48 извлечения корня квадратного, третий блок 49 перемножения, два фильтра 50, 51,
5 а элементы, моделирующие эквивалентные сопротивления взаимоиндуктивности и сопротивления рассеяния ротора выполнены регулируемыми, два входа по току и напряжению первого фазового дискриминатора
0 38 соединены с соответствующими инфор- - мационными выходами инвертора напряжения, а его выход через первый блок 39 сравнения модели асинхронного электродвигателя соединен с входами первого 43 и
5 второго 44 масштабных усилителей, второй фазовый дискриминатор 37 соединен входами по току и напряжению с соответствующими информационными выходами модели инвертора 36 напряжения, а его выход сое0 динен с вторым входом первого блока 39 сравнения модели асинхронного электродвигателя, входы по току первого 38 и второго 37 фазовых дискриминаторов соответственно через первый и второй вхо5 ды второго блока сравнения 40 модели асинхронного электродвигателя соединены с входами третьего 45, четвертого 46 и пятого 47 масштабных усилителей, выходы первого и третьего масштабных усилителей
0 подключены к первому и второму входам сумматора 41, третий вход которого и выход подключены соответственно к выходу модели механической передачи 21 и к входу модели исполнительного механизма 22.
5 Выходы второго и четвертого масштабных усилителей соответственно через первый и второй входы третьего блока сравнения модели асинхронного электродвигателя и первый вход первого фильтра 51 подключены к входам управления элементов, моделирующих сопротивления ротора 32 первой и второй фазных цепей, а выход пятого масштабного усилителя соеднен со входами управления элементов, моделирующих эквивалентное сопротивление взаи- моиндуктивности 33 в первой и второй фазных цепях, выход третьего блока 13 сравнения подключен к входу блока извлечения корня квадратного и к первому входу третьего блока 49 перемножения, второй вход которого соединен с выходом блока 48 извлечения корня квадратного и входом второго фильтра 50, выход которого соединен с входами управления элементов, моделирующих эквивалентное сопротивление рассеяния ротора 35 в первой и второй фазных цепях, а выход третьего блока перемножения соединен с вторым входом первого фильтра 51.
Устройство работает следующим обра- зом.
Сначала подается сигнал с блока задания потокосцепления 6 навход регулятора потокосцепления 8, который компенсируя большую постоянную времени объекта фор- мирует переходный процесс установления заданного потокосцепления ротора соответственно модульному оптимуму. Одновременно регулятор потокосцепления 8 вырабатывает уставку для регулятора на- магничивающей составляющей тока 10 асинхронного электродвигателя, который компенсирует большую постоянную времени рассеяния двигателя. Регулятор намагничивающей составляющей тока статора 10 в свою очередь вырабатывает уставку вход- ного напряжения блока управления частотой и модулем напряжений инвертора напряжения 3, пройдя при этом преобразователь координат 5 и блок задания вектора напряжения 4. На вход регулятора частот вращения 14 через задатчик интенсивности 12 подается сигнал задания частоты вращения с блока задания частоты вращения 11. Одновременно на выходе регулятора часто- ты вращения 14 появляется сигнал задания электромагнитного момента, который после прохождения через делительное устройство 15 образует сигнал задания активной составляющей тока статора. Регулятор частоты вра- щения компенсирует электромеханическую постоянную времени, а регулятор активной составляющей тока статора 17 компенсирует постоянную времени рассеяния двигателя и вырабатывает сигнал для преобразователя координат 5.
Выходящие из преобразователя координат 5 составляющие напряжения статора Uin:nUi/ преобразуются в блоке задания
вектора напряжения А в модуль напряжения (UI, который поступает на вход блока управления частотой и модулем напряжения инвертора 3. От блока управления частотой и модулем напряжения инвертора один сигнал идет на автономный инвертор напряжения 2 объекта и затем на асинхронный электродвигатель 1, а другой идет на модель автономного инвертора 36 напряжения, который представляет собой маломощный аналог основного инвертора. Выходной сигнал модели инвертора 36 напряжения, состоящий из трехфазных токов, поступает в блок 18 преобразователя числа фаз и тем cav M на входе модели асинхронного электродвигателя 23 имеем два источника тока Паи И/ . Использование источников тока Паи ф позволяет упростить модель электропривода, так как П-образные пассивные четырехполюсники реализуются на варика- пах, а не дросселях с подмагничиванием.
Модель асинхронного электродвигателя в неподвижной системе координат описывается известной системой дифференциальных уравнений, работает в реальном масштабе времени, ее .выходной величиной является вращающий момент двигателя, который определяется по известной зависимости с помощью вычислителя 30 момента
М a Ki - . ф «2 где На, Н/3, tyia, tyifi соответственно токи фаз статора и потокосцепления фаз ротора в системе координат а, Д
Так как задача определения координат движения системы возложена на аналоговую модель устройства, т.е. она играет роль наблюдателя и регламентирует изменение частоты вращения электропривода, то обратная связь по частоте вращения реализуется с помощью моделей механической передачи 21 и исполнительного механизма 22, первая из которых может быть реализована с помощью Т-образной схемы замещения с переменными параметрами вертикальной ветви, учитывающими параметры податливости и трения, а вторая позволяет учитывать изменение нагрузки и момента инерции и представляет собой последовательно включенные регулируемые раздельно индуктивность и резистивное сопротивление.
Работа идентификаторов тока статора по модулю и фазе осуществляется следующим образом: на вход дискриминатора 37 модели поступают напряжение UM и ток 1М модели инвертора 36, а на вход дискриминатора 38 объекта - напряжение U06 и ток 0б инвертора 2 в блоке 39 сравнения определяется сдвиг по фазе Д р токов модели и объекта. Сравнение токов модели и объекта по модулю происходит в блоке сравнения 40 и на вход масштабных усилителей 45-47 подается сигнал ошибки Д1. В функции модульной А) и фазовой А рошибки корректируются следующие параметры модели электропривода:
частота вращения модели механической передачи 21
а Д1 +az , где ai, «2 - коэффициенты усиления масштабных усилителей 45 и сооответственно 43, активного сопротивления ротора
ARj 03 Д1 + 04 Ар,
где ссз, сц коэффициенты усиления масштабных усилителей 44 и 46 соответственно, индуктивного сопротивления взаимондук- ции 33
,
где as- коэффициент усиления масштабного усилителя 47.
Для осуществления развязки систем адаптации параметров Ra и Х0 в канал регулирования AR2 устанавливается фильтр 51. - ... -. - - - - -.
Для учета эффекта вытеснения тока ротора в функции скольжения корректируются следующие параметры модели:
эквивалентное активное сопротивление ротора 32 по закону R т S VS,
эквивалентное сопротивление рассеяния ротора 35 по закону X s V5.
Закон регулирования S л/ Греализуется с помощью лока 48 извлечения корня квадратного и блока 49 умножения, с помощью только блока 48 извлечения корня квадратного; назначение фильтра 50 в данном случае аналогично фильтру 51.
Применение предлагаемого устройства для управления частотно-регулируемого электропривода позволяет существенно сниить количество параметров, требующих подстройки и тем самым упростить систему адаптации параметров модели. Использование предлагаемого устройства для управления частотно-регулируемого электропривода позволяет улучшить качество регулирования именно за счет адаптации параметров таких существенных нелинейностей как насыщение магнитной системы асинхронного электродвигателя, нелинейности моделей механической передачи, исполнительного механизма и преобразователя частоты, а также эффекта вытеснения тока ротора.
Так как компенсация таких нелинейностей осуществляется путем изменения параметров П-образного четырехполюсника, то получаемое быстродействие является оптимальным при сравнении его со схемой
микропроцессорной адаптации в связи с тем, что исключается запаздывание, связанное с расчетом дискретного управляющего воздействия.
Формула изобретения
Устройство для управления асинхронным частотно-регулируемым электродвигателем, содержащее инвертор напряжения, выходы которого предназначены для под0 ключения к упомянутому электродвигателю, блок управления частотой и модулем напряжения, вход которого подключен к выходу блока задания вектора напряжения, входами соединенного с соответствующими вы5 ходами преобразователя координат, последовательно соединенные блок задания потокосцепления, первый блок сравнения, регулятор потокосцепления, второй блок сравнения и регулятор намагничива0 ющей составляющей тока статора, последовательно соединенные блок задания частоты вращения, задатчик интенсивности, третий блок сравнения, регулятор частоты вращения, блок деления, четвертый
5 блок сравнения и регулятор активной составляющей тока статора, выход которого и выход регулятора намагничивающей составляющей тока статора подключены к первым двум входам преобразователя коор0 динэт, преобразователь числа фаз, вычислитель модулей составляющих тока статора, вычислитель модуля потокосцепления, модель механической передачи, модель испол- нител,ьного механизма и модель
5 асинхронного электродвигателя с двумя фазными цепями, двумя инверторами, двумя сумматорами, двумя блоками перемножения и вычислителем момента, при этом каждая из фазных цепей выполнена поП-об0 разной схеме замещения с двумя элементами, моделирующими активные сопротивления статора и ротора, и тремя элементами, моделирующими эквивалентные сопротивления взаимоиндуктивности,
5 рассеяния статора и рассеяния ротора, входы фазных цепей, образующие первые два входа модели асинхронного электродвигателя/объединены с соответствующими входами вычислителя модулей составляющих
0 тока статора и подключены к выходам преобразователя числа фаз, вход первого инвертора и первый вход первого сумматора подключены к выводам элемента, моделирующего эквивалентное сопротивление взаи5 моиндуктивности в первой фазной цепи, вход второго инвертора и первый вход второго сумматора подключены к выводам элемента, моделирующего эквивалентное сопротивление взаимоиндуктивности во второй фазной цепи, выходы первого и оторого инверторов подключены соответственно к вторым входам первого и второго сумматоров, подключенных выходами к первым входам второго и первого блоков перемножения соответственно, вторые входы блоков перемножени.я объединены между собой и образуют третий вход модели асинхронного электродвигателя, объединенный с третьим входом преобразователя координат и другим входом третьего блока сравнения и подключенный к выходу модели исполнительного механизма, выходы первого и второго блоков перемножения соединены со свободными выводами элементов, моделирующих активное сопротивление ротора соответственно в первой и второй фазных цегтх, выходы первого и второго сумматоров, образующих первые два выхода модели асинхронного электродвигателя, подключены к входам, вычислителя модуля потокосцепления, выход которого подключен к четвертому входу преобразователя координат, другому входу блока деления и другому входу первого блока сравнения, первые два входа вычислителя момента объединены с соответствующими входами фазных цепей, другие два. входа подключены к выходам сумматоров, а выход вычислителя момента, образующий третий выход модели асинхронного электродвигателя, подключен к входу модели механической передачи, соответствующие выходы вычислителя модулей составляющих тока статора подключены к пятому и шестому входам преобразователя координат и к другим входам второго и четвертого блоков сравнения, отличающееся тем, что, с целью повышения точности управления путем корректирования тока статора, введена модель инвертора напряжения, подключенная входом к выходу блока управления частотой и модулем напряжения, а выходом - к входу преобразователя числа фаз. сумматор, инвертор напряжения снабжен двумя дополнительными информационными выходами по току и напряжению, а в модель асинхронного электродвигателя введены два фазовых дискриминатора, три блока сравнения и пять масштабных усилителей, блок извлечения корня квадратного, третий блок перемножения, два фильтра, а элементы, моделирующие сопротивление ротора в фазных цепях, и элементы, моделирующие
эквивалентные сопротивления взаимоиндуктивности и сопротивления рассеяния ротора, выполнены регулируемыми, два входа по току и напряжению первого фазового
дискриминатора соединены с соответствующими информационными выходами инвертора напряжения, а его выход через первый блок сравнения модели асинхронного электродвигателя соединен с входами
первого и второго масштабных усилителей, второй фазовый дискриминатор соединен входами по току и напряжению с соответствующими информационными выходами модели инвертора напряжения, а его выход с вторым входом первого блока сравнения модели асинхронного электродвигателя, входы по току первогб и второго фазовых дискриминаторов подключены соответственно к первому и второму входам второго
блока сравнения модели асинхронного электродвигателя, выход которого соединен с входами третьего, четвертого и пятого масштабных усилителей, выходы первого и третьего масштабных усилителей подкл ючены к первому и второму входам сумматора, третий вход которого и выход подключены соответственно к выходу модели механической передачи и к входу модели исполнительного механизма, в ыходы второго и
четвертого масштабных усилителей подключены соответственно к первому и второму входам третьего блока сравнения модели асинхронного электродв итателя, выходом соединенного с первым входом первого
фильтра/выход которого подключен к входам управления элементов, моделирующих сопротивления ротора первой и второй фазных цепей, а выход пятого масштабного усилителя соединен с вводами управления
элементов, моделирующих эквивалентные взаимоиндуктивности в первой и второй фазных цепей, выход третьего блока сравнения подключен к входу блока извлечения корня квадратного и к первому входу третьего блока перемножения, второй вход которого соединен с выходом блока извлечения корня квадратного и входом второго фильтра, выход которого соединен с входами управления элементов, моделирующих
эквивалентное сопротивление рассеяния ротора в первой и второй фазных цепях, а выход третьего блока перемножения соединен со вторым входом первого фильтра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод | 1986 |
|
SU1347142A1 |
| Частотно-регулируемый асинхронный электропривод | 1984 |
|
SU1184064A1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1585894A1 |
| ВЫСОКОДИНАМИЧНЫЙ БЕЗДАТЧИКОВЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ МОМЕНТОМ | 2012 |
|
RU2498497C1 |
| Устройство для управления асинхронным частотно-регулируемым электродвигателем | 1983 |
|
SU1128361A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| СПОСОБ ВЕКТОРНОЙ ОРИЕНТАЦИИ ТОКА ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ ЭНЕРГИИ И УСТРОЙСТВО ВЕКТОРНОЙ ОРИЕНТАЦИИ ("ВЕКТОРИНГ") ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1998 |
|
RU2141720C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |

| Шрейнер Р.Т., Дмйтренко Ю.А | |||
| Опти- мальйоб ЧастРтнОб управление асинхронными электроприводами | |||
| - Кишинев: Ш-шиниа, 1682 | |||
| Частотно-регулируемый асинхронный электропривод | 1984 |
|
SU1184064A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
