1134
Изобретение относится к электротехнике, а именно к частотно-регулируемым электроприводам на основе асинхронных двигателей., и может быть использовано в различных отраслях народного хозяйства.
Цель изобретения - повышение качества регулирования частоты вращения за счет обеспечения корректировки па- раметров использованной модели асинхронного электродвигателя в функции ошибки по модулю и фазе тока статора.
На фиг.1 представлена функциональная схема частотно-регулируемого электропривода; на фиг.2 - схема модели асинхронного электродвигателя.
Частотно-регулируемый электропривод содерлдат асинхронный электродвигатель 1 .(Фиг.1), подключенный к выг ходам инвертора 2 напряжения, блок 3 управления частотой и модулем напряжения, соединенный входом с выходом вычислителя 4 модуля вектора.напряжения, входы которого подключены к выходам преобразователя 5 координат, выполненного с шестью, управляющими входами, последовательно соединенные блок 6 задания потокосцепления, первый блок 7 сравнения, регулятор 8 потокосцепления, второй блок 9 сравнения и регулятор 10 намагничивающей составляющей тока статора, последовательно соединенные блок 11 задания частоты вращения, задатчик 12 интенсивности, третий блок 13-сравнения, регулятор 14 частоты вращения, блок 15 деления, четвертый блок 16 сравнения и регулятор 17 активной составляющей тока статора, выход которо го и выход регулятора 10 намагничивающей составляющей тока статора подключены к соответствуюищм первым двум управляющим входам преобразователя 5 координат. Электропривод содер кит также модель 8 инвертора напряжения преобразователь 19 числа фаз, вычис.геитель 20 модулей составляющих тока статора, вычислитель 21 модуля потокосцепления, модель 22 механической передачи, модель 23 испольштель- яого механизма и модель 24 асинхронного электродвигателя. В частотно-регулируемый электропривод введен сумматор 25, а инвертор 2 напрял ения и модель 18 инвертора напряжения снабжены дополнительными контрольными
5
0.
выходами по напряжению и току (выходами датчиков напряжения и тока).
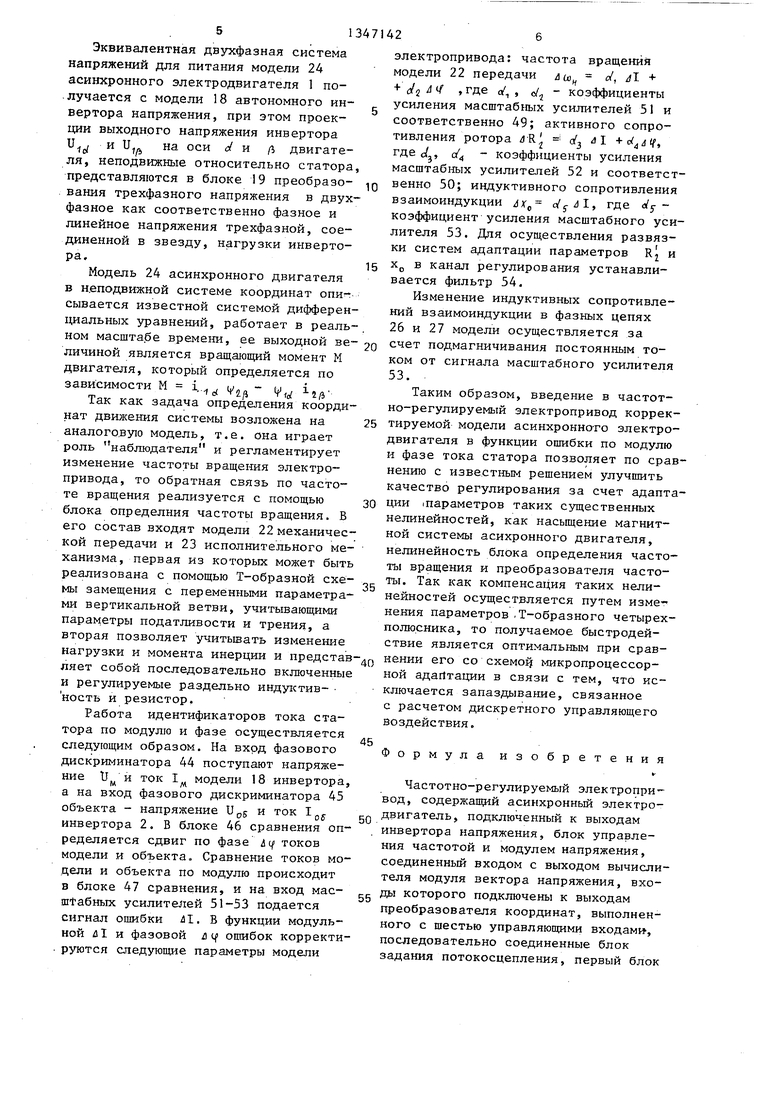
Модель 24 асинхронного электродвигателя выполнена с двумя фазными цепями 26 и 27 (фиг. 2), двумя интеграторами 28 и 29, двумя блоками 30 и 31 перемножения, инвертирующим усилителем 32 и вычислителем 33 момента. Каждая фазная цепь 26 и 27 выполнена по Т-образной схеме замещения. Параметры резисторов 34 и 35 в фазной цепи 26 эквивалентны активным сопротивлениям статора и ротора, параметры дросселей 36-38 эквивалентны индуктивным сопротивлениям статора и ротора и индуктивному сопротивлению взаимоиндукции статора и ротора соответственно. Параметры резисторов 39 и 40 и дросселей 41-43 в фазной цепи 27 аналогичны указанным.
5
0
5
0
Входы фазных цепей 26 и 27, образующие первые два входа модели 24 асинхронного электродвигателя, подключены к выходам преобразователя 19 числа фаз, соединенного входами с- выходами модели 18 инвертора напряжения, входы которой объединены с соответствующими управляюш ими входами инвертора 2 напряжения и подключены к выходам блока 3 управления частотой и модулем напряжения.
Входы первого интегратора 28 подключены к общей точке соединения резистора 35 и дросселя 37, а входы второго интегратора 29 - к общей точке соединения резистора 40 и дросселя 42. Выход интегратора 28 через первый блок 30 перемножения соединен со свободным выводом резистора 40, а выход интегратора 29 через инвертирующий усилитель 32 и.второй блок 31 перемножения соединен со свободным g выводом резистора 35, .Другие входы блоков 30 и 31 перемножения объединены и образуют третий вход модели 24 асинхронного электродвигателя, под- ключ енньш к выходу модели 23 исполнительного механизма.
Общая точка соединения резистора 34 и дросселя 36 и общая точка соединения резистора 39 и дросселя 41 образуют первые два выхода модели 24 асинхронного электродвигателя, подключенные к первым двум входам вычислителя 33 момента и к соответствующим входам вычислителя 20 модулей составляюпщх тока статора. Выходы
0
5
3
интеграторов 28 и 29 образуют третий и четвертый выходы модели 24 асинхронного электродвигателя, подключеные к соответствующим входам вычислителя 21 модуля потокосцепления и к другим двум входам вычислителя 33 момента, выход которого образуют пятый выход модели 24 асинхронного электродвигателя, подключенный к вхо ду модели 22 механической передачи. Другой вход первого блока 7 сравнения объединен с другим входом блока 15 деления, с третьим управляющим входом преобразователя 5 координат и подключен к выходу вычислителя 21 модуля потокосцеплЬния.
Другой вход третьего блока 13 сравнения объединен с четвертым упраляющим входом преобразователя 5 коор динат и подключен к выходу модели 23 исполнительного механизма. Другие входы второго 9 и четвертого 16 блоков сравнения объединены соответствено с пятым и шестым управляющими вхо дами преобразователя 5 координат и подключены к вычислителю 20 модулей составляющих тока статора.
Модель 24 асинхронного электродвигателя снабжена дополнительно двумя фазовыми дискриминаторами 44 и 45, тремя блоками 46-48 сравнения, пятью масштабными усилителями 49-53 и фильтром 54.Дроссели 38 и 43 в фазных цепях 26 и 27 выполнены с входами подмагничивания, подключенными к выходу пятого масштабного усилителя 53. Резисторы 35.и 40 фазных цепей 26 и 27 выполнены регулируемыми, подключенными управляющими входами к выходу фильтра 54.
Входы фазового дискриминатора 44 подключены к контрольным выходам по напряжению и току модели 18 инвертора напряжения. Входы фазового дискри- минатора 45 подключены к контрольным выходам по напряжению и току инвертора 2 напряжения. Выходы фазовых дискриминаторов 44 и 45 подключены к входам первого блока 46 сравнения. Контрольные выходы по току модели 18 инвертора напряжения и инвертора 2 напряжения подключены к входам второго блока 47 сравнения. Выход блока .46 сравнения подключен к входам пер- вого 49 и второго 50 масштабных уси- пнтелей, а выход блoka 47 сравнения - к входам третьего 51, четвертого 52 и пятого 53 масштабных усилителей. Вы
5
47
IQ-jg
о5
о Q
g g
5
1424
ходы масштабных усилителей 50 и 52 подключены к входам блока 48 сравнения, соединенного выходом с входом фильтра 54. Выходы масштабных усилителей 49 и 51 подключены к первым двум вхо дам сумматора 25, третий вход которого соединен с выходом модели 22 механической передачи, а выход сумматора 25 - с входом модели 23. исполнительного механизма.
Частотно-ре гулируемый электропривод работает следующим образом.
Сигнал задания потокосцепления (Vj), поступает на вход регулятора 8 потокосцепления, который, компенсируя большую постоянную времени объекта, формирует переходный процесс установления заданного потокосцепления ротора соответственно модульному оптимуму. Одновременно регулятор 8 потокосцепления вырабатьшает уставку для регулятора 10 намагничивающей составляющей тока статора, который компенсирует большую постоянную времени рассеяния двигателя. Регулятор 10 намагничивающей составляющей тока статора в свою очередь вырабатывает уставку входного напряжения для блока 3 управления частотой и модулем напряжения, пройдя при этом преобразователь 5 координат и вычислитель 4 модуля вектора напряжения. На вход регулятора 14 скорости через задат- чик 12 интенсивности подается сигнал задания скорости uj . Одновременно на выходе регулятора 14 скорости появляется сигнал задания электромагнитного момента, который после прохождения через блок 15 деления образует сигнал задания активной составляющей тока статора. Регулятор 14 скорости компенсирует электромеханическую постоянную времени, а регулятор 17 активной составляющей тока статора компенсирует постоянную времени рассеяния двигателя и вырабатывает сигнал для преобразователя 5 координат. Составляющие напряжения и , и и д с выхода преобразователя 5 координат поступают на вход вычислителя 4 модуля вектора напряжения, с выхода которого снимается сигнал (U). Указанный сигнал поступает на вход блока 3 управления частотой и модулем напряжения, управляющего работой инвертора 2 напряжения и модели 18 инвертора напряжения.
51347142
Эквивалентная двухфазная система напряжений для питания модели 24 асинхронного электродвигателя 1 получается с модели 18 автономного инвертора напряжения, при этом проекции выходного напряжения инвертора
электропривода: частота вращений модели 22 передачи -за) с/, jl + + 0/2 , где al , с/ - коэффициенты усиления масштабных усилителей 51 и соответственно 49; активного сопротивления ротора ;JR d 1 I где cC,, /4 - коэффициенты усиления масштабных усилителей 52 и соответст- представляются в блоке 19 преобразо- Q венно 50; индуктивного сопротивления вания трехфазного напряжения в двух- взаимоиндукции бх, c/j-Jl, где 1 фазное как соответственно фазное и линейное напряжения трехфазной, соединенной в звезду, нагрузки инвертои
и и.
на оси d и /г двигатеfo/ л ля, неподвижные относительно статора.
коэффициент усиления масштабного усилителя 53. Для осуществления развязки систем адаптации параметров Rj и 15 Хр в канал регулирования устанавлики систем адаптации параметров Rj и 15 Хр в канал регулирования устанавливается фильтр 54.
Изменение индуктивных сопротивлений взаимоиндукции в фазных цепях 26 и 27 модели осуществляется за
ра.
Модель 24 асинхронного двигателя в неподвижной системе координат опи сывается известной системой дифферен- 1щальных уравнений, работает в реаль-. ном масштабе времени, ее выходной не- Q счет подмагничивания постоянным то- личиной является вращающий момент М ком от сигнала масштабного усилителя двигателя, который определяется по 53. зависимости М i,. i - i. Таким образом, введение в частотТак как задача определения коорди- но-регулируемый электропривод коррек- нат двшкения системы возложена на 25 тируемой модели асинхронного электродвигателя в функции ошибки по модулю и фазе тока статора позволяет по сравнению с известным решением улучшить качество регулирования за счет адапта- 30 ции (Параметров таких сзпцественных нелинейностей, как насьш ение магнитной системы асихронного двигателя, нелинейность блока определения частоты вращения и преобразователя частоты. Так как компенсация таких нелимы замещения с переменными параметра- нейностей осуществляется путем измени вертикальной ветви, учитывающими нения параметров .Т-образного четырех- параметры податливости и трения, а полюсника, то получаемое быстродей- вторая позволяет учитьшать изменение ствие является оптимальным при срав- нагрузки и момента инерции и представ- нении его со схемо микропроцессор- ляет собой последовательно включенные ной адайтации в связи с тем, что исаналого.ву1о модель, т.е. она играет роль наблюдателя и регламентирует изменение частоты вращения электропривода, то обратная связь по частоте вращения реализуется с помощью блока определния частоты вращения. В его состав входят модели 22 механической передачи и 23 исполнительного механизма, первая из которых может быть реализована с помощью Т-образной схе35
и регулируемые раздельно индуктив- ность и резистор.
Работа идентификаторов тока статора по модулю и фазе осуществляется следующим образом. На вход фазового дискриминатора 44 поступают напряжение U| и ток 1 модели 18 инвертора, а на вход фазового дискриминатора 45 объекта - напряжение и ток инвертора 2. В блоке 46 сравнения определяется сдвиг по фазе токов модели и объекта. Сравнение токов моЧастотно-регулируемый электропривод, содержащий асинхронный электро- gg двигатель, подключенный к выходам инвертора напряжения, блок управления частотой и модулем напряжения, соединенный входом с выходом вычисли теля модуля вектора напряжения, входели и объекта по модулю происходит
в блоке 47 сравнения, и на вход мае- ды которого подключены к выходам штабных усилителей 51-53 подается преобразователя координат, выполнен- сигнал ошибки Л1, В функции модуль- него с шестью управляющими входам, ной Л1 и фазовой лqi ошибок корректи- последовательно соединенные блок . руются следующие параметры модели задания потокосцепления, первый блок
электропривода: частота вращений модели 22 передачи -за) с/, jl + + 0/2 , где al , с/ - коэффициенты усиления масштабных усилителей 51 и соответственно 49; активного сопротивления ротора ;JR d 1 I где cC,, /4 - коэффициенты усиления масштабных усилителей 52 и соответст- венно 50; индуктивного сопротивления взаимоиндукции бх, c/j-Jl, где 1
коэффициент усиления масштабного усилителя 53. Для осуществления развязэлектропривода: частота вращений модели 22 передачи -за) с/, jl + + 0/2 , где al , с/ - коэффициенты усиления масштабных усилителей 51 и соответственно 49; активного сопротивления ротора ;JR d 1 I где cC,, /4 - коэффициенты усиления масштабных усилителей 52 и соответст- венно 50; индуктивного сопротивления взаимоиндукции бх, c/j-Jl, где 1
ки систем адаптации параметров Rj и Хр в канал регулирования устанавливается фильтр 54.
Изменение индуктивных сопротивлений взаимоиндукции в фазных цепях 26 и 27 модели осуществляется за
счет подмагничивания постоянным то- ком от сигнала масштабного усилителя 53. Таким образом, введение в частот45
ключается запаздывание, связанное с расчетом дискретного управляющего воздействия.
ормула изобретения
Частотно-регулируемый электропривод, содержащий асинхронный электро- двигатель, подключенный к выходам инвертора напряжения, блок управления частотой и модулем напряжения, соединенный входом с выходом вычислителя модуля вектора напряжения, вхосравнения, регулятор потокосцепления второй блок сравнения и регулятор намагничивающей составляющей тока статора, последовательно соединенные блок задания частоты вращения, задат чик интенсивности, третий блок срав - нения, регулятор частоты вращения, блок деления, четвертый блок сравнения и регулятор активной составляю- щей тока статора, выход которого и выход регулятора намагничивающей составляющей тока статора подключены к соответствующим первым двум управляющим входам преобразователя координат модель инвертора напряжения, преобразователь числа фаз , вычислитель модулей составляющих тока статора, вычислитель модуля потокосцепления, модель механической передачи, модель исполнительного механизма и модель асинхронного электродвигателя, выполненный двумя фазными цепями, двумя интеграторами, двумя блоками перемножения, инвертирующим усилителем и вычислителем момента, при этом каждая фазная цепь выполнена по Т-образной схеме замещения на резисторах и дросселях с параметрами, эквивалентными активным и индуктивньм сопротив- лениям рассеяния статора и ротора и индуктивному сопротивлению взаимоиндукции статора и ротора, входы фазных цепей, образующие первые два входа модели асинхронного электродвигателя подключены к выходам преобразователя числа фаз, соединенного входами с выходами модели инвертора напряжения, входы которой объединены с соответ- ствуюищми управляющими входами инвер- тора напряжения и подключены к выходам блока управления частотой и модулем напряжения, входы первого и второго интеграторов подключены соответственно к общим точкам соединения резистора и дросселя с параметрами, эквивалентными активному и индуктивному сопротивлению рассеяния ротора в каждой фазной цепи модели асинхронного электродвигателя, выход первого интегратора через первый блок перемножения соединен со свободным выводом резистора с параметром, эквивалентным активному сопротивлению ротора во второй фазной цепи, выход второго интегратора через инвертирующий усилитель и второй блок перемножения соединен со свободным выводом резистора с параметром.
эквивалентным активному сопротивлению ротора во второй фазной цепи, другие входы блоков перемножения объединены и образуют третий вход модели асинхронного электродвигателя, под ключенный к выходу модели исполнительного механизма, общие точки соединения резистора и дросселя с параметрами, эквивалентными активному и индуктивному сопротивлениям рассеяния статора в каждой фазной цепи, образуют первые два выхода модели асинхронного электродвигателя, под- ключ-енные к первым двум входам вычислителя момента и к соответствующим входам вычислителя модулей составляющих тока статора, выходы интеграторов образуют третий и четвертый выходы модели асинхронного электродвигателя, подключенные к соответствую- 1ЦИМ входам вычислителя модуля потокосцепления и к другим двум входам вычислителя момента, выход которого образует пятый выход модели асинхронного электродвигателя, подключенный к входу модели механической передачи, другой вход первого блока сравнения объединен с другим входом блока деления, с третьим управляющим входом преобразователя координат и подключен к выходу вычислителя модуля потокосцепления, другой вход третьего блока сравнения объединен с четвертым управляющим входом преобразователя координат и подключен к выходу модели исполнительного механизма, а другие входы второго и четвертого блоков сравнения объединены соответственно с пятым и шестым управляющими входами преобразователя координат и подключены к выходам вычислителя модулей составляющих тока, статора, о т л и ч а ю щ и и с я тем, что, с целью повышения качества регулирования скорости за счет корректировки параметров модели асинхронного электродвигателя в функции ошибки по модулю и фазе тока статора, введен сумматор, инвертор напряжения, а модель инвертора напряжения снабжена дополнительными контрольными выходами по напряжению и. току, модель асинхронного электродвигателя снабжена дополнительно двумя фазовыми дискриминаторами, тремя блоками сравнения, пятью масштабными усилителями и фильтром, дроссели в фазных цепях с параметрами, эквивалентными индуктивному сопротивлению взаимоиндукции статора и ротора, вьтолыены с входами подмаг- ничИванйя, подключенными к выходу пятого масштабного усилителя, а резисторы фазиых цепей с параметрами, эквивалентными активному сопротивлению ротора, вьтолнены регулируемт ми, подключенными управляющими входами к выходу фильтра, при этом входы первого фазового дискриминатора подключены к выходам по напряжению и току модели инвертора напряжения, входы второго фазового дискриминатора подключены к выходам .по напряжению и току, ин- вертор,а напряжения, выходы фазовых дискриминаторов подключены к входам первого блока сравнения модели асинхронного электродвигателя, контрольные выходы по току модели инвертора. напряжения и инвертора напряжения
подключены к входам второго блока сравнения модели асинхронного электродвигателя, выходы указанных блоков сравнения подключены соответственно к объединенным входам первого и второго масштабных усилителей и к объединенным входам третьего, четвертого и пятого масштабных усилителей, выходы второго и четвертого масштабных усилителей подключены к входам третьего блока сравнения модели асинхронного электродвигателя, соединенного выходом с входом фильтра, а выходы первого и третьего масштабных усилителей подключены к первым двум входам сумматора, третий вход которого соединен с выходом модели механической .передачи,, а выход сумматора - с входом модели исполнительного меха-i низма.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронным частотно-регулируемым электродвигателем | 1990 |
|
SU1793526A1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1585894A1 |
| ВЫСОКОДИНАМИЧНЫЙ БЕЗДАТЧИКОВЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ МОМЕНТОМ | 2012 |
|
RU2498497C1 |
| Устройство для управления асинхронным частотно-регулируемым электродвигателем | 1983 |
|
SU1128361A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
| Частотно-регулируемый асинхронный электропривод | 1984 |
|
SU1184064A1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
Изобретение относится к электротехнике и может быть использовано в различных отраслях народного хозяйства. Целью изобретения является повышение качества регулирования частоты вращения за счет обеспечения корректировки параметров использованной модели асинхронного двигателя в функции ошибки по модулю и фазе тока статора. Указанная цель достигается введением в частотно-регулируе мый электропривод сумматора 25, входами соединенного с выходами модели 24 асинхронного двигателя 1, модели 22 механической передачи, а выходом - с входом модели 23 исполнительного механизма. Модель 24 реализована с помощью Т-образных четырехполюсников. Инвертор 2 напряжения-и его,модель 18 снабжены контрольными выходами по . напряжению и току, которые подключены к соответствующим входам модели 24. Б результате в элеткроприводе за счет изменения параметров Т-образного четырехполюсника модели 24 обеспечивается компенсация таких существенных нелинейноетей, как насыщение магнитной системы асинхронного двигателя 1, нелинейность блока определения частоты вращения и преобразователя частоты. Быстродействие такого электропривода становится оптимальным. 2 ил. с ф со 4:: 
Йгг.2
Редактор М.Тушща
Составитель А.Жилин
Техред И.Верес Корректор В.Бутяга
Заказ 51.25/50Тираж 658 Подписное
ВНИИГМ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-355 Раушская наб, д. 4/5
Производственно-похшграфическое предприятие, г„ Ужгород, .ул. Проектная, 4
| Шрейнер Р,Т | |||
| и др | |||
| Оптимальное частотное управление а.синхронньми электроприводами.- Кишенев: Штиинца, 1982 | |||
| Устройство для управления асинхронным частотно-регулируемым электродвигателем | 1983 |
|
SU1128361A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
