Изобретение относится к промьшшеннести строительства и стройматериалов, в частности к устройствам для отрезки порции стекломассы, вытекающей из очка капельного питателя стек- лоформующей машины, и может быть использовано в областях, где необходима отрезка от струи порции пластичного материала.
Цель изобретения - уменьшение следа реза, повьш1ение качества издег
I
ЛИЯ и увеличение срока службы ножей,
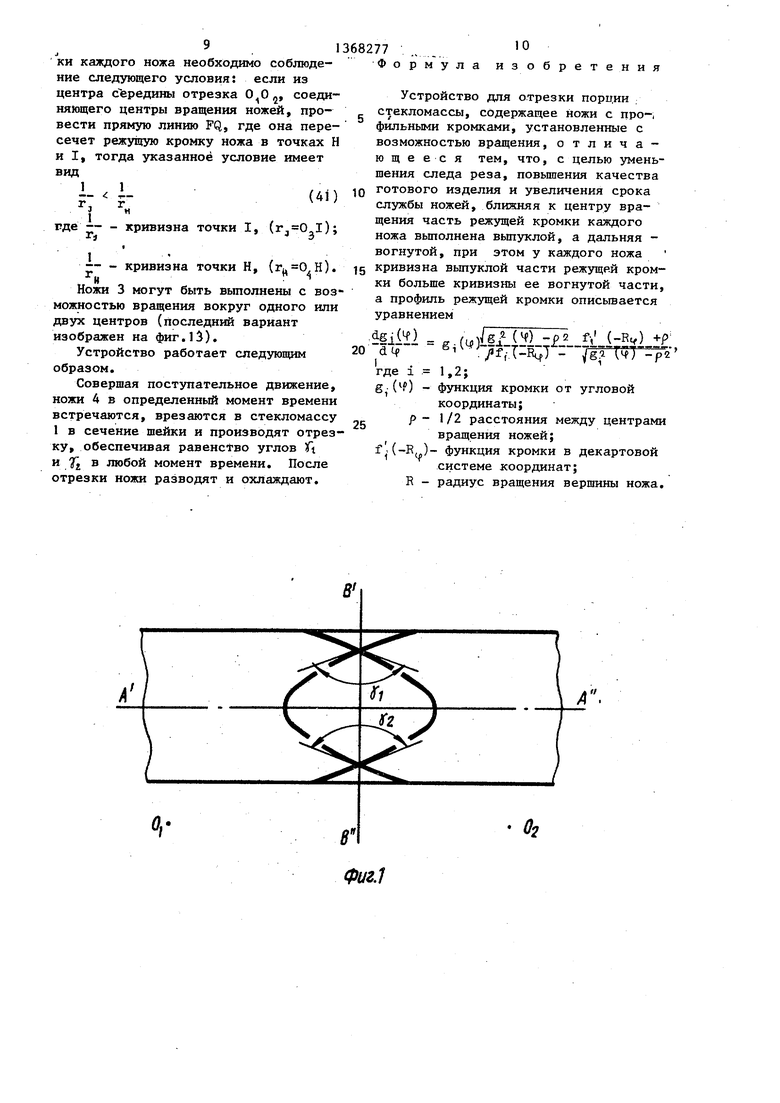
На фиг.1 - 8 показан последовательный процесс вывода уравнения профиля режущей кромки; на фиг,9 - I1 - построение характерных точек профиля кромок; на фиг.12 - ножницы в момент их касания; на фиг.13- нож с заданным профилем режущей кромки.
Профиль кромки каждого ножа описы) вается уравнением

| название | год | авторы | номер документа |
|---|---|---|---|
| Летучие ножницы | 1979 |
|
SU854619A1 |
| Устройство для разволокнения кожи и других материалов | 1984 |
|
SU1341196A1 |
| Барабанные летучие ножницы | 1979 |
|
SU829356A1 |
| Способ точения некруглых в попереч-HOM СЕчЕНии ТЕл | 1977 |
|
SU818752A1 |
| Способ обработки сложных поверхностей | 1986 |
|
SU1393548A1 |
| СПОСОБ ОБРАБОТКИ КРИВОЛИНЕЙНЫХ КОНТУРОВ ПЛОСКИХ ДЕТАЛЕЙ | 2005 |
|
RU2311264C2 |
| Листовые барабанные ножницы | 1978 |
|
SU776801A1 |
| Барабанные летучие ножницы | 1985 |
|
SU1379027A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ПЕРЕВОДА СУДНА НА ПАРАЛЛЕЛЬНЫЙ КУРС С СОБЛЮДЕНИЕМ ОГРАНИЧЕНИЙ НА ДИАПАЗОН ИЗМЕНЕНИЯ СИГНАЛА УПРАВЛЕНИЯ | 2012 |
|
RU2515006C1 |
| ВИНТОВОЙ КОМПРЕССОР | 2010 |
|
RU2526128C2 |

Изобретение относится к промышленности строительства и стройматериалов,: к стекольному производству, в частности к устройствам для отрезки порции стекломассы, вытекающей из очка капельногр питателя стеклофор- мующей машины и может быть использовано в областях, где необходима от резка от струи порции пластичного материала. С целью уменьшения следа реза, повышения качества готового изделия и увеличения срока службы ножей профнль режущей кромки их выполнен таким, что ближняя к центру v вращения часть режущей кромки каяздого ножа, вьшуклая, а дальняя - вогнутая. Необходимо, чтобы кривизна выпуклой части была больше кривизны ее вогнутой части. 13 ил. Л
ilif g. () isiOfi i p:
pf. (R4))
где g. (Ц)
f;(-R,).
функция кромки от угловой координаты; / - 1/2 расстояния между
центрами вращения ножей; функция кромки в декартовой системе координат;
R - радиус вращения вершины ножа.
Уравнение выводится следующим образом.
Равенство углов ()i и у) в простейшем случае достигается симметризацией, кромок относительно продольных осей (вдоль оси А -А ) ножей при прямолинейном их движения (фиг.1).
Однако в большинстве случаев ножи перемещаются по дугам окружностей. Рассмотрим переход от симметричных
ножей с прямолинейными кромками и с движением по прямой линии к ножам, вьтолненным с возможностью вращения вокруг центров 0 и О .
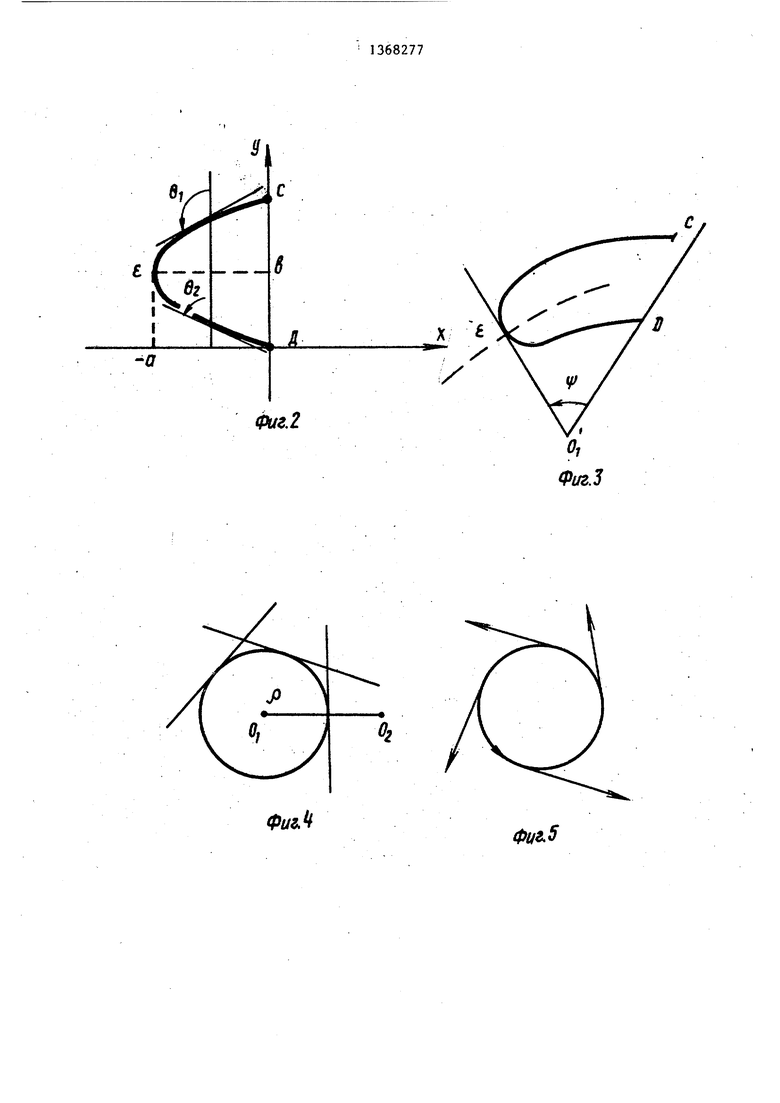
Поскольку система ножей осесиммет- рична (относительно оси (В -В ), достаточно рассмотреть лишь один из ножей, например, левый. Режущая кром-
ка ножа CD является гладкой кривой (фиг.2). Для изучения поступательного движения введем декартову систему координат, связанную с ножом, начало которой совмещено с точкой D, а ось абсцисс параллельна прямой А А. В этой системе координат кривую CD удобно задавать двумя функциями: у f (х) и у Г„(х), описывающими участки кривой от Е до С (верхняя
кромка и от Е до D (нижняя кромка), Е - точка, в которой касательная к CD вертик.альна.
Гладкость кривой CD обеспечивает- ся условиями
:
.LtLLi LtJL
- Vg) -p2
(1)
(2)
f(x) и (x) непрерывно дифференцируемыми:
lim ft(x) 00 ,lim f(x) -oo(3) X - --ci1
где (-a) - абсцисса точки E;
f (-a) f(-).(4)
При исследовании вращательного движения ножа более удобной является полярная система координат, связанная с ножом. Ее центр совмещен с центром О вращения ножа, а угол Ц) отсчитывается от луча, проходящего через точку D (фиг.З).
В этой системе координат кривую CD удобно задавать также двумя функциями: г g (f) и г йп (ц) описывающими участки кривой от Е до С (верхняя кромка) и от Е до D (нижняя кромка) соответственно; здесь Е - точка, в которой касательная к GD проходит через центр 0. Гладкость кривой CD обеспечивается условиями
§(4-) и е((5):
непрерывно дифференцируемыми: lim gi С) -«, lim g (f) (5)
Lp-.; где ф ;
50
R (OjE) - радиус окружности, по которой вращается точка Е (фиг.З):
8(Ц) е(Ц).
(7)
Основными геометрическими парамет- 55 рами, характеризующими взаимодействие ножей в процессе резки, являются углы резания у верхней и нижней кромках соответственно (фиг.1).
Ввиду осесимметричности системы ножей достаточно рассматривать углы 0 , и 0, образованные верхней и ниж11 D n
ней кромками и осью симметрии В В (фиг.2). При этом
r,-f;
О
, -% Ч 2
Проанализируем сначала случай по- ,Q ориентации против часовой стрелки ступательного движения ножей.(фиг.5).
В выбранной нами системе координат нож неподвижен, а ось симметрии совершает .поступательное движение,
Аналитически это условие выража ется неравенством.
О .- (
Ц -л .
оставаясь все время перпендикулярной g прямой А А. Следовательно, интересующие нас углы 9 (х) и 0„(х) определяются из соотношений
ctgS-(х) -f(x); i 1; 2. (9) ,, 0(4) ci(f) -p,(4).i 1, 2 (12)
Рассмотрим теперь случай вращатель-,где о(.(Ч ) - угол мезвду продолжением
ного движения ножей. В выбранной радиус-вектора точки (g (4),4 ) и
нами системе координат нож неподви-касательной к кривой г g-(/) в
жен, а точка О2 движется по окружное- этой точке; p.( f) - угол между проти с центром в О и радиусом d (0, Oj,).
Поскольку ось симметрии системы : ножей перпендикулярна отрезку и проходит через его середину, получаем., что при движении ножа ось симметрии завершает семейство касательных к окружности с центром в О и радиусом р d/2 (фиг.4).
Это семейство в параметрическом виде задается уравнением
г cos(i - ) р , (10)
где параметр Д - угловая координата точки касания соответствзтощей прямой (фиг.6).
25 должением радиус-вектора точки
(gi(V ),4) и касательной к окружности с центром в О., и, радиусом р d/2, проведенной из этой точки (напомним, что эта касательная есть
3Q образ оси в в при движении системы и задается уравнением (10) (фиг.7). Как известно .
35
40
tgcii(tf) i 1, 2. (13)
Далее, по фиг.7 видно, что Р-(Ч) 5 - (f - А), i 1,2 (14)
откуда
tg(3 (Ч ) ctg(4 -у ),i 1,2 (15) Из- (12) - (15) получаем
Ifft-l - ctg(t и )
-,( ,, ,„
. - (.-H) .,
Теперь согласно (10) имеем
А
А }
Р.
I Г2
(5 rzL;
знака при корне определяется 55 i неравенством (11), следовательно; + il-l.-
и бГ()-р
Ctg(Lf-A) .--f
ir -p i
(9)
и окончательно
Заметим, что, если считать, что
нож, для определенности, движется по часовой стрелке, то вращение отрезка, - происходит против часовой стрелки. Поэтому нам достаточно вместо касательных прямых к окружности рассматривать лишь касательные лучи, ориентация которых соответствует
Аналитически это условие выражается неравенством.
О .- (П)
Ц -л .
Пусть г 6(4), i - уравнения верхней и нижней кромок, тогда имеем
должением радиус-вектора точки
(gi(V ),4) и касательной к окружности с центром в О., и, радиусом р d/2, проведенной из этой точки (напомним, что эта касательная есть
образ оси в в при движении системы и задается уравнением (10) (фиг.7). Как известно .
35
tgcii(tf) i 1, 2. (13)
Далее, по фиг.7 видно, что Р-(Ч) 5 - (f - А), i 1,2 (14)
откуда
tg(3 (Ч ) ctg(4 -у ),i 1,2 (15) Из- (12) - (15) получаем
Ifft-l - ctg(t и )
, ,„
Подставляя (19) в (16) и учитывая, 50 что г g(4), получаем дифференци- , альное уравнение
и1Й.
(5 rzL;i,,:
55 i ; + il-l.-
и бГ()-р
(9)
(20)
и окончательно
SiM g (ч) M-i l-lf-- -f-i§- i l-; i ,,2 (21): V Jgf (V) -P tg0. (f) Ч-Р
/ -5
Уравнение (21) содержит неизвест- и выражает тот факт, что точка Р двйную функцию 01 (if), которую можно жется по окружности радиуса R. найти из (9), вьфазив х через f . В общем случае уравнение (1) не В выбранных системах координат пере- удается решить аналитически, и необход от X к If задается формулой ю ходимо пользоваться численными методами. Ниже рассматриваются два частЧ - -,(22) ных случая, в которых удается найти
аналитическое решение.
где R (О.лЕ), следовательно уравнение (21) с учетом (1) принимает вид Случай I. Пусть .Q const, i
igj(4) / /gl(f) -J fi (-R.f)+P.,2. В этом случае верхняя и
-- - - - 7 НИЖНЯЯ кромки ножей при поступатель . . (-К() - ygf (Ч )-рном движении будут прямолинейными
Начальное условие имеет вид(фиг.8). Для вращательного движе20ния уравнения кромок (21) примут
g.(|) R, i 1, 2 (23)вид ,
§i.ilf) g. (Ч) iSEl-ff.I eJiei; i 1,2 (24) d . g(f) -p tg© +Я
Разделяя переменные, получаем
p2 tg9. + О
-dg; i 1,2 (25)
gj( /g. - p-tgQ,)
откуда
t
Cf.(r) + f ielZPl sf- lf-dg, ; i 1,2 (26) pJ g (6 -Ftg9;
Вычислим неопределенный интеграл:
Р
I
z dz
P, + - /
I -Д ---dx (27)
J / - аЪ40 . Следовательно,
т - Г z dz -1
Имеем J 1г Ъ 7Г2 - а ъ7
т f .- - :LJ:-:b j; a4 ,.
J l(ptT - ab)varctg- -- + .у
45 a In X + b(Ua)l2 . (28);(ln( аЪ) - Inx
/(30)
Пус.ть Ъ :;fr 0 (случай Ъ О будет
рассмотрен отдельно).
Для вычисления интеграла. з (30) и (28) получаем
1„ Г ЕЕ (29) I, arctg i aln( - аЪ);
J с . -кг „v : D
«I x( - Ъ - аЪ)
° (31)
сделаем замену переменной z U - Ъ55 , что в выражении для I,
Тогда X + Ъ (выбор знака + д. v -о
а - ък f 5 D к 5
объясняется тем, что длина радиус- i
вектора неотрицательна), и dx из (26) и (31) получаем
,(r) 7°+ arctg ilL-El + tB& tg -p tg(9./, (32)
РФО, i 1,2 Величина Ч Язпределяется из начального условия (23):
- I f°+ arctg
/ЙУ-р} Р
tgOi
1п/( р tg0i /
о, i Г,2
Окончательно получаем
(33)
(г) + (arctg - arctgX
u&. t.., in/pHt-EV- -||y.o
i 1,2 (34)
Правила построения характерных точек следующие: точка , имеет коор- „..
ZO
динаты (R; ), точка D есть точка
1
пересечения кривой V 4 n(r) с лучом if 0; точка С есть точка пересечения кривой ,4 4 (г) с касательной к окружности с центром в О, и радиусом р, проведенной из точки D (фиг„9).
Построенные профили кромок (фиг.8 и 9) не удовлетворяют условиям гладкости (31) и (6), сформулированным выше. Для того, чтобы эти 35 условия вьшолнялись, в случае поступательного движения,достаточно, например, построить небольшую окружность радиуса, касательную к обеим кромкам. Метод построения такой окружности в данном случае очевиден.
При переходе к: вращательному движению необходимо решить уравнешш (1) при f XxJ УЧ + );
(г(х) (x-xj) , где (xg,; YQ} - координаты центра искомой окружности.
Однако, ввиду того, что конкретный вид профиля на малом участке не ва- gg жен, а необходимр лишь обеспечение гладкости кромки, можно попытаться построить сопряжение полученных кривых с помощью окружности радиуса Re.
Для этого можно использовать следую- gg
ПЦ1Й приближенный графический метод.
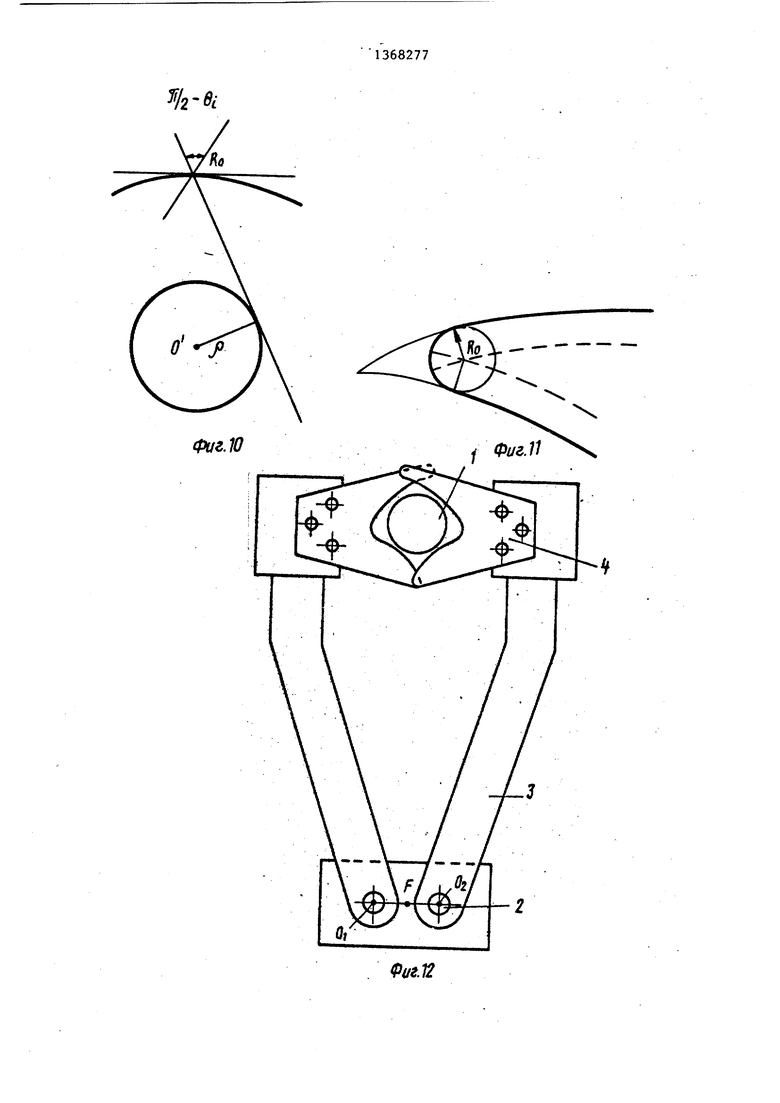
Провести через заданную точку кромки касательную к окружности радиг уса PC центром в 0 (фиг. 10),
Провести через эту же точку прямую, составляющую с построенной касательной угол Tf/2 - 0| по часовой
.стрелке (фиг.11).
. k
Отложить от этой точки .на полученной прямой отрезок длины р ; для точек нижней кромки откладывать от-, резки по направлению от центра (фиг. 10), для точек верхней кромки - по направлению к центру.
Проделав указанные шаги для достаточно большого числа точек обеих кромок, получаем две кривые (фиг.П) Точка их пересечения будет центром искомой окружности.
.Случай 2. Пусть р О, т.е. ножи вращаются вокруг общего центра. В этом случае уравнения (1) могут быть решень аналитически при произвольных функциях f, ;(x). Действительно, (1) переходит в
,()f; (-H);i,,2
(35)
Разделяя в этом уравнении переменные , ползтааем
1 -f;(-J)dV; ,2
(36)
I откуда
Ig gj (-) + ,2 (37) или i (
g(4) с t ,2 (38)
Величина С определяется из начального условия (23)
R Се ,2 (39)
Окончательно получаем
ij(-R)-b
g.(if) R е ; ,2 (40)
где Ъ f,(-a) fb(-a) - ордината точкиД (фиг.2).
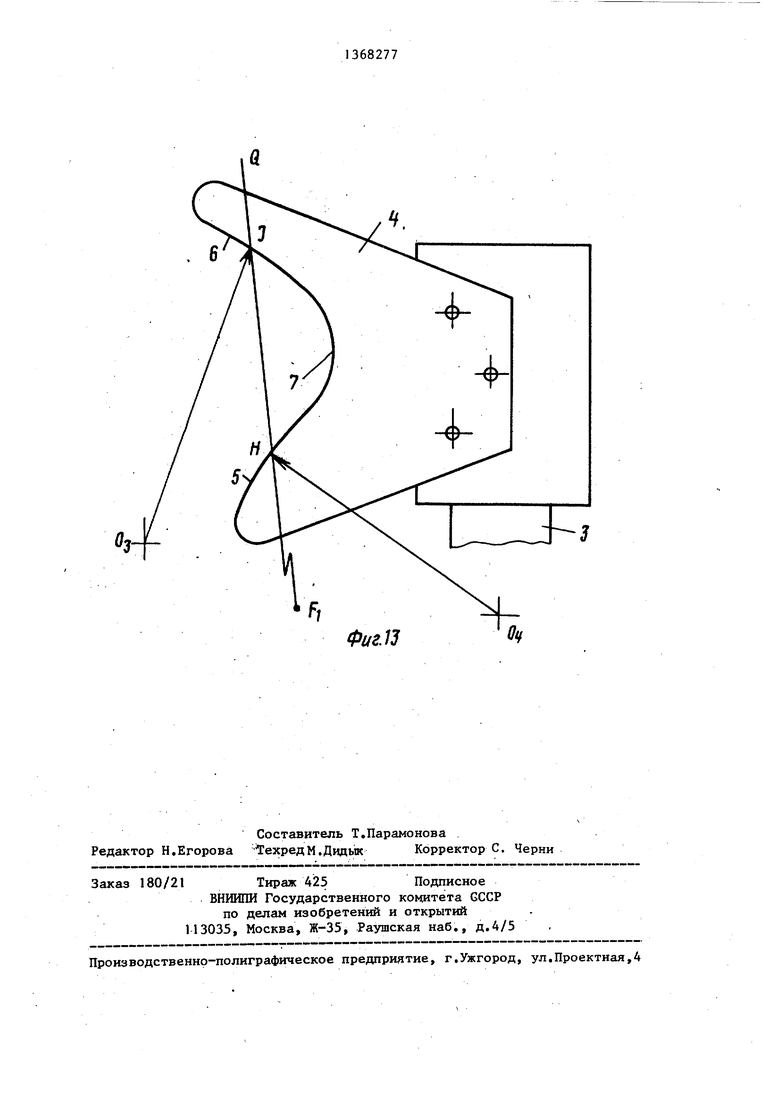
Устройство для отделения порции стекломассы 1 содержит вращающиеся на осях 2 рычаги 3, на которых закреплены ножи 4. Ближняя к Центру вращения часть режущей кромкй-5 ножа 4 выполнена выпуклой, а верхняя-6 - вогнутой Вершина режущей кромки нож может быть выполнена со скруглениек, 7. При построении формы режущей крой91
ки каждого ножа необходимо соблюдение следующего условия: если из центра сЪредины отрезка О О 2 соединяющего центры вращения ножей, провести прямую линию PQ, где она пересечет режущую кромку ножа в точках Н и I, тогда указанное условие имеет вид
гдекривизна точки I, ( I);
r.jу
I
- - кривизна точки Н, ( Н).
Н.
Ножи 3 могут быть вьтолнены с возможностью вращения вокруг одного или двух центров (последний вариант изображен на фиг.15).
Устройство работает следующим образом.
Совершая поступательное движение, ножи 4 в определенный момент времени встречаются, врезаются в стекломассу 1 в сечение шейки и производят отрезку, обеспечивая равенство углов Tt и 7г в любой момент времени. После отрезки ножи разводят и охлаждают.
368277 О
Формула изобретения
Устройство для отрезки порции стекломассы, содержащее ножи с пРО-, фильными кромками, установленные с возможностью вращения, отличающееся тем, что, с целью уменьшения следа реза, повышения качества
IQ готового изделия и увеличения срока службы ножей, ближняя к центру вращения часть режзпдей кромки каждого ножа вьшолнена вьшуклой, а дальняя - вогнутой, при этом у каждого ножа
5 кривизна вьшуклой части режущей кромки больше кривизны ее вогнутой части, а профиль режущей кромки описьшзется уравнением
20
5|. ,,,„Й1Т| „.,(-.):
где 1 1,2;
g () - функция кромки от угловой
координаты; -с р - 1/2 расстояния между центрами
вращения ножей; f Л-К( )- функция кромки в декартовой
системе координат; R - радиус вращения вершины ножа.
5|. ,,,„Й1Т| „.,(-.):,
где 1 1,2;
g () - функция кромки от угловой
координаты; р - 1/2 расстояния между центрами
вращения ножей; f Л-К( )- функция кромки в декартовой
системе координат; R - радиус вращения вершины ножа.
Ог
Фиг.}
Фиг.2
Фиг.
Фиг. 6
.
г{П
(Риг.9
%-
Фиг.Т2
ФигЛ
| Патент США № 2920421, кд.83-600, опублик | |||
| Пробочный кран | 1925 |
|
SU1960A1 |
