СА:Э
Э5 00 О5 ZfS
1
Изобретение относится к измерительной технике и может быть использовано для автоматического прецизионного измерения линейных перемещений.
Цель изобретения - повышение точности измерения - достигается за счет устранения погрешности, обусловленной нестабильностью угла взаимного разворота решеток.
На фиг, 1 представлена блок-схема фотоэлектрического датчика линейных перемещений; на фиг. 2 - вариант выполнения привода.
Датчик содержит источник 1 излучения, установленные по ходу излучения неподвижную растровую решетку 2, кинематически связанную с измеряемым объектом подвижную растровую решетку 3, фотоприемный блок 4, блок 5 измерения линейного перемещения, две идентичные цепи, каждая из которых состоит из последовательно включенных блоков 6 возведения в квадрат, полосовых фильтров 7, фазочувствительных детекторов 8, а также генератор 9 синусоидального напряжения, сумматор 10 постоянного тока, усилитель 11 и привод 12, кинематически связанный с подвижной решеткой 3.
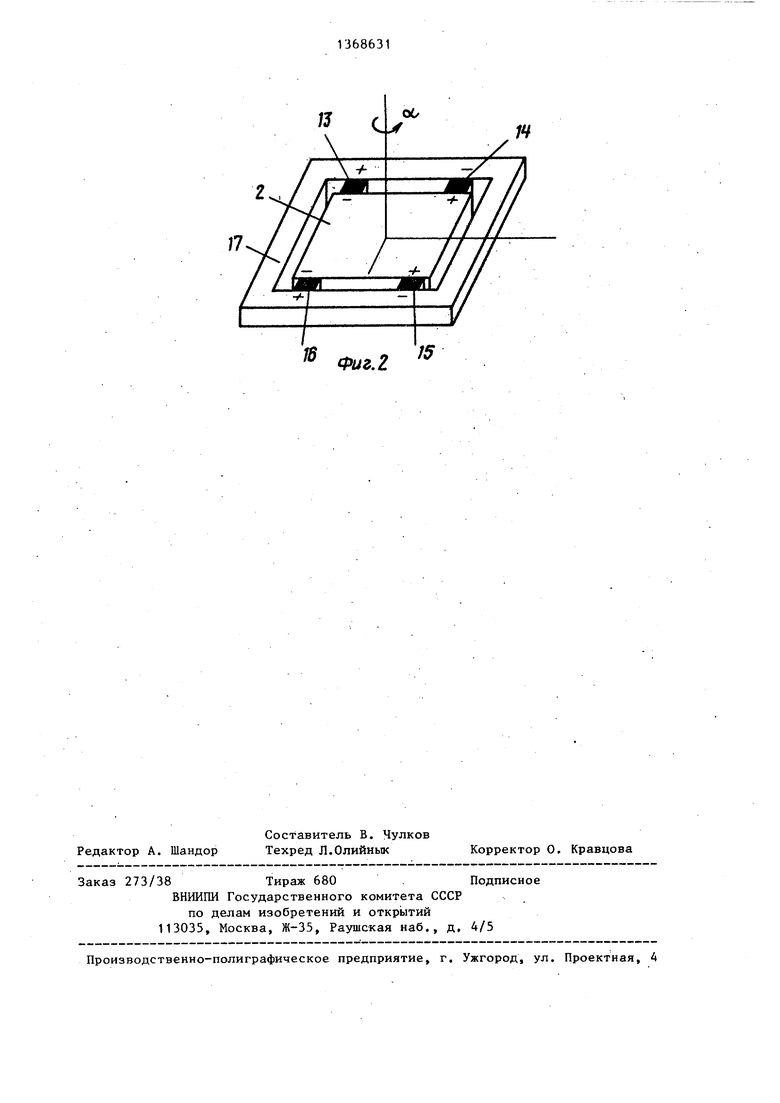
Привод 12 выполнен в виде четырех пьезоэлементов 13-16 и оправы 17.
Датчик работает следующим образом ПРИ перемещении подвижной растровой решетки 3, связанной с объектом (не показан), перемещение которого измеряется относительно неподвижной растровой решетки 2, на фотоприемный блок 4 поступает промодулированный растровым сопряжением световой поток от источника -1 излучения. На выходе фотоприемного блока формируются два гармонических сигнала с фазовым сдвигом один относительно другого на /2 (квадратурные сигналы) - sin(2 ii l/d) и cos(2irl/d). Эти сигналы подаются в блок 5 измерения линейного перемещения, где определяется величина измеряемого перемещения 1, например, методом счета муаровых полос и интерполирования квадратурных сигналов дл определения долей шага растров.
При включении датчика также включается генератор 9 синусоидального напряжения, в результате чего к приводу 12 через сумматор 10 и усилител 11 подается переменное напряжение с частотой со , намного большей, чем
. я
ь
68631 . 2
частота квадратурных сигналов фотопри-. емного блока fi , возникающих за счет линейного перемещения подвижной решетки 3. Привод приводит подвижную решетку в угловое колебание относительно оси, перпендикулярной плоскости штрихов и расположенной в центре подвижной решетки. Относительный раз- 1Q ворот решеток с по указанной оси вызывает изменение амплитуды квадратурных сигналов вследствие изменения фазы сигналов от каждого элементарного участка вДоль штриха. Эту зависимость амплитуды А можно представить
20
25
30
35
IF
следующим образом:
А A d-kui),
где k - коэффициент, зависящий от периода штрихов и размера решеток;
АО - максимальное значение амплитуды, соответствующее решеткам с параллельными штрихами.
С учетом этого квадратурные сигналы на выходе фотоприемного блока 4 . имеют следующую зависимость от времени t:
U,(t) Ao(1-ke6) sin(Qt); Uj(t) Ag(l-koi) cos(nt).
Относительный разворот решеток обусловлен вынужденным колебанием подвижной решетки по сигналу генератора- (Qt) и поворотом , обусловленным неточным изготовлением направляющих, в которых перемещается решетка, (otfl- амплитудное значение углового колебания рещетки).
G учетом этого имеем
U,(t) A(,l-kji -2kp t sin(at) - - koi- sin(cut)3 sin(jit).
После возведения этого сигнала в квадрат с помощью блока 6 на выходе полосового фильтра 7, настроенного на частоту генератора со , имеем (при ),
55 и (t) -A ,4koio jb (1-k/5 ) -3kVo/3 xsin(o3t) sin(nt).
Ha выходе второго фильтра имеем
40
45
50
и , (t) -А „ 4Ыо 1Ь (1 -kp ) - 3kV
sinCot) cos (t).
Эти сигналы подаются на входы фа зочувствительных детекторов 8, на вторые входы которых в качестве опорного подается напряжение от генератора 9, Сигналы на выходе детекторов 8 имеет следующий вид:
U f3k.io +4k/i -A A «i sin4$2t); и 3k«i ,ft cos4«t).
Q
Эти сигналы подаются на вход сумматора, куда также подается сигнал с генератора. На выходе сумматора имеем .
( +4k/5 -4) +U sin(ot).
Здесь первая составляющая представляет собой сигнал компенсации, пропорциональный исходному повороту решеток . По этому сигналу с сумматора привод поворачивает подвижную решетку, отрабатывая угловое рассогласование . В результате на выходе фотоприемного блока имеем
и, (t) A 1-kci. sin(cot)l sintat);
UjCt) Ao l-kcio sin (tot) cos(at).
Как видно из этих выражений, вы- нужДенное колебание подвижной pemef- ки с амплитудой Ыо и частотой со приводит к изменению квадратурных сигналов. Влияние этого изменения на точность измерения линейных перемещений блоком 5 зависит от принципа построения блока 5, Это влияние можно уменьшить, уменьшая величину амплитуды ai , или поместив на входе блока измерения линейного перемещения фильтр нижних частот, который не пропустит составляющие
koio sin (at) sin(Qt) и
.
.1368631
kci o sin (cot) cos (sit).
5
Привод может быть выполнен в виде( четырех пьезоэлементов 13-16 (фиг.2), одновременно выполняющих функцию подвеса подвижной решетки 3 в оправе 17, связанной с измеряемым объектом, для чего данные пьезозлементы закрепляют Q ся одной стороной к решетке, а другой - к оправе. Поворот решетки относительно оправы по оси, перпендикулярной плоскости штрихов, происходит посредством сокращения одного 13 и
1g удлинения другого 16 пьезоэлементов, расположенных соосно по двум сторонам решетки. Для этого к их обкладкам подводятся напряжения разной полярности. Перемещение второй пары соос2Q ных пьезоэлементав происходит в обратной последовательности, причем все четыре пьезоэлемента размещаются симметрично относительно геометрического центра решетки,
25
Формула изобретения
Фотоэлектрический датчик линейных перемещений, содержащий источник из- 2Q лучения, подвижную и неподвижную растровые решетки, фотоприемный блок и блок измерения линейных перемещений, отличающийся тем, что, с целью повышения точности измерения, он снабжен двумя цепями, каждая из которых содержит последовательно подключенные блок возведения в квадрат, полосовой фильтр и фазочувствительный детектор, а также генератором синусоидального напряжения, усилителем постоянного тока, приводом и сумматором, к входам которого подключены выходы генератора и фазочувствительных детекторов, а выход через усилитель постоянного тока подключен к приводу, кинематически связанному с подвижной решеткой, входы блоков возведения в квадрат соединены с соответствующими выходами фотоприемного блока,а вторые входы фазочувствительных детекторов подключены к выходу генератора синусоидального напряжения.
35
40
45
50
Фиг.2
W
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения углового перемещения объекта | 1989 |
|
SU1791705A1 |
| Растровый преобразователь перемещения | 1989 |
|
SU1717960A1 |
| Устройство для аттестации линейности дифракционной решетки | 1984 |
|
SU1205103A1 |
| Фотоэлектрический преобразователь угловых перемещений в фазовый сдвиг | 1982 |
|
SU1083072A1 |
| Устройство измерения распределения поля фазированной антенной решетки | 1985 |
|
SU1359757A1 |
| Фотоэлектрический преобразователь перемещения в фазовый сдвиг сигнала | 1982 |
|
SU1030828A1 |
| Гидроакустический пеленгатор | 1990 |
|
SU1780072A1 |
| СПОСОБ КОМПЕНСАЦИИ СДВИГА ЧАСТОТЫ СИГНАЛА С НЕИЗВЕСТНОЙ НАЧАЛЬНОЙ ФАЗОЙ | 1990 |
|
RU2012011C1 |
| ИЗМЕРИТЕЛЬ ДЕВИАЦИИ ЧАСТОТЫ СИГНАЛОВ С ГАРМОНИЧЕСКОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 1992 |
|
RU2054680C1 |
| СПОСОБ РЕГИСТРАЦИИ ФАЗЫ КВАДРАТУРНЫХ СИГНАЛОВ | 2018 |
|
RU2692965C1 |
Изобретение относится к измерительной технике и может быть использовано для автоматического прецизионного измерения линейных перемещений. Цель изобретения - повышение точности измерения за счет устранения погрешности, обусловленной нестабильностью угла взаимного разворота решеток. В датчик введена система автоматического регулирования угла относительно разворота подвижной решетки, имеющая две цепи, содержащих каждая блок 6 возведения в квадрат, полосовой фильтр 7 и фазочувствитель- ный детектор 8, которые вместе с сумматором 10 и с помощью генератора 9 вычисляют величину относительного разворота растровых решеток. Через усилитель 11 постоянного тока сигнал, пропорциональный углу разворота, подается на Привод 12, который компенсирует ошибку в угле разворота решеток. 2 нл. с 
| Фотоэлектрический преобразователь перемещений | 1982 |
|
SU1035418A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
