Л
со
со
со
Изобретение относится к деревообработке и может быть применено в оборудовании для лесопиления.
Цель изобретения улушпение условий труда оператора и повышение производительности.
На фиг. I изображено устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - узел I на фиг. 1; на фиг. 4 - с.хема одного из вариантов установки станка; на фиг. 5 - с.чема релейного узла для управления электромашитны.х катушек гидрораспределителя.
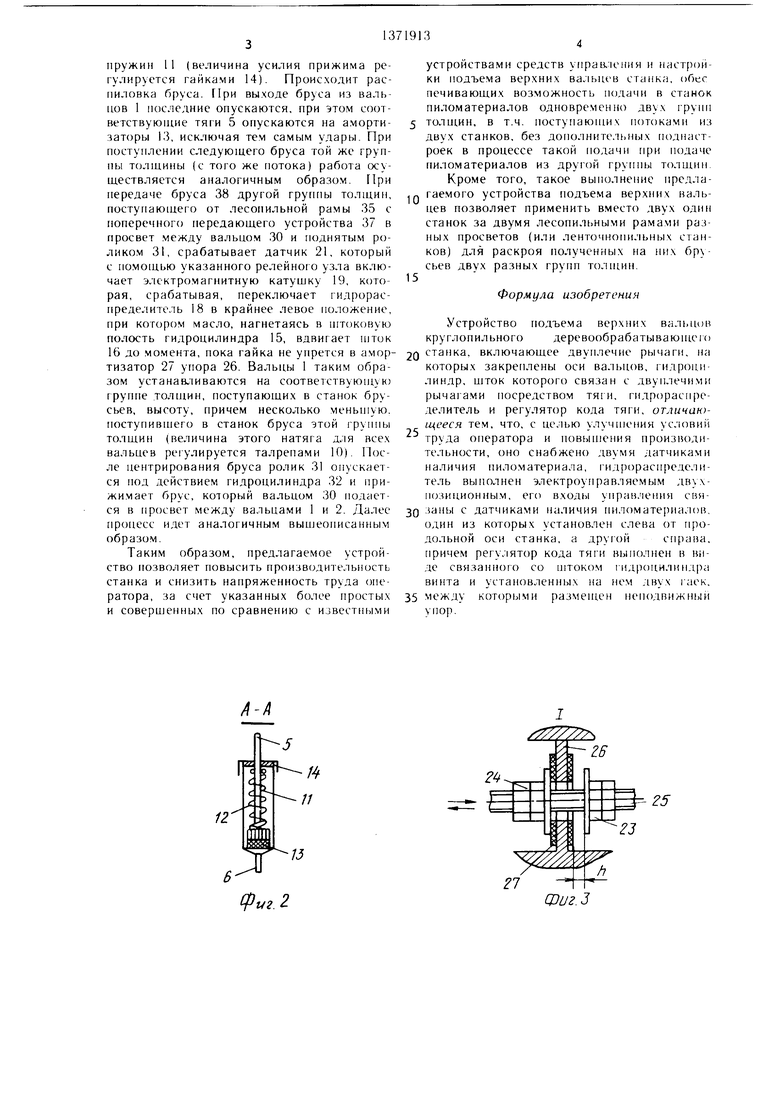
Устройство юдъема верхних вальцев круглоп ильного деревообрабатываюшего станка содержит верхние 1 и нижние 2 приводные вальцы, соосно расположенные круглые пплы 3. Оси каждой пары верхних вальцев 1 шарнирно прикреплены к двуплечим рычагам 4, которые в свою очередь 1иарнир- ио 11одве1пепы к станине станка. Каждый конец двуплечего рычага 4 пгарнирно свя- зап че)ез тяги 5, 6, механизм 7 для прижима вальпев 1 и другой двуплечий рычаг 8 с ()бп1ей тягой 9, состоящей из отдельных стержней. С()единенн151х между собой тал- |)епами К). ЛАеханизм 7 для прижима ва.ть- пев 1 вьпюлнен в виде схватывающей ко- пец тяги 5 пружины 1 1 сжатия, расположенной в полости 12 тяги 6, причем один конец п)ужины 1 I жестко ,-(а({)иксирован на тяге Г) и разьемно связан с дном полости тяги () посредством амортизатора 13, друг ой ко- неп пружины II связан с тягой 6 посредством 1 айки 14, обеспечиваюп;ей регулировку усилия пружипы 11. Тяга 9 имеет привод возвратно-поступательного ее перемещения н виде гидропилиндра 15, HJTOK 16 которого связан посредством рычага 17 и одного из двуплечих рычагов 8 с концом тяги 9. Гидроцилиндр 15 имеет алектроуправляемый двухпозиционный гидрораспределитель 18, его ::. 1ектрома1 ниты 19 и 20 связаны с установленными на входе станка перед вальцами 1 и 2 двумя датчиками 21-и 22 наличия 1шломатериала, которые настроены на разные тсхтшины лесоматериала. Один из них 21 установлен слева от продольной оси стап- ка, а другой 22 - справа. Кроме того, устройство имеет регулятор 9 хода тяги, вы- полненный в виде двух гаек 23 и 24, связанных со штоком 16 через рычаги В и 17 посредством шариирно присоединенного к тяге 9 винта 25, причем между гайками 23 и 24 расположен неподвижный упор 26, снабженный торцовыми амортизаторами 27. Для установки требуемого хода тяги 9 имеется шкала 28 с указателем 29. Перед вальцами 1 и 2 установлены дополнительно нижний подающий валец 30 и верхний ролик 31 с гидроцилиндром 32 его прижима. Ста нок 33 с указанным устройством для подъе ма верхних вальцов установлен (фиг. 4)
0
5
0
5
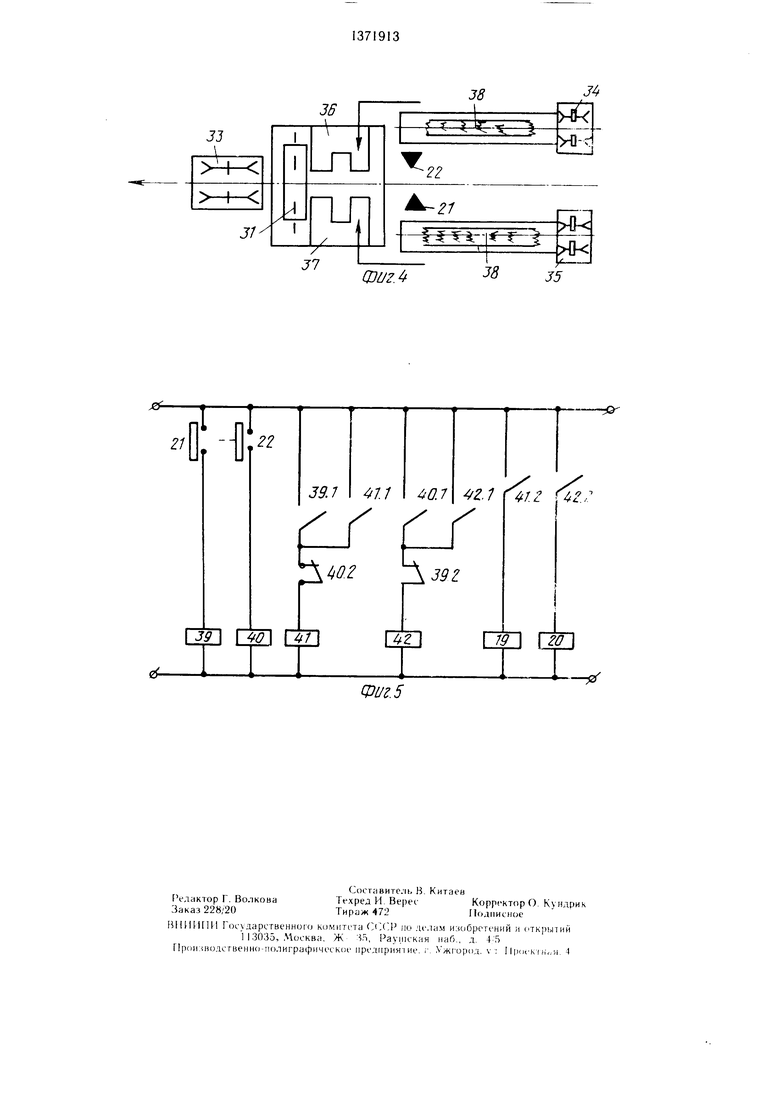
после лесопильных брусообразующих станков для распиловки разных по диаметру бревен, например после узкопросветной и среднепросветной лесопильных рам 34 и 35, рамные конвейеры которых связаны с приемной частью станка 33, т.е. с его роликом 31 и вальцом 30 посредством механизмов 36 или 37 для поперечной передачи пиломатериалов, например бруса 38, к продольной оси станка 33. Электромагниты 19 и 20 связаны с датчиками 21 и 22 наличия пиломатериалов посредством релейного узла (схема узла изображена на фиг. 5), который содержит выходные реле 39 и 40 датчиков 21 и 22 и промежуточные реле 41 и 42. Устройство работает следующим образом.
Перед началом работы осуществляют опускание верхних вальцев 1 на высоту, обеспечивающую надежный прижим посту паюгцего в станок 33 пиломатериала минимальной толщины, например бруса 38 от лесопильной рамы 34 узкого просвета. Это осуществляется путем установки гайки 23 в требуе.мое положение с помощью указателя 29 и шкалы 28. Зате.м, исходя из толщины более толстого бруса 38, выходящего из лесопильной рамы I ряда среднего просвета 35, между а.мортизатором 27 упора 26 и гайкой 23 устанавливают расстояние h, которое соответствует разни 1е толщин брусьев, выходящих из рам 34 и 35, которое контролируется по шкале 28. При передаче бруса 38, поступающего от лесопильной рамы 34 с механизма 36 в просвет между вальцем 30 и поднятым роликом 31, срабатывает датчик 22, который с помощью
, указанного релейного узла включает электромагнит 20, который, срабатывая, переключает гидрораспределитель 18 в крайнее правое положение, при котором масло, нагне- таясь в поршневую полость гидроцилиндра 15, выдвигает щток 16 до момента, пока
0 гайка 24 не упрется в амортизатор 27 упора 26. Вальцы 1 таким образом устанавливаются на соответствующую группе толщин, поступающих в станок 33 брусьев 38, высоту, причем несколько меньшую толщины
5 поступившего в станок бруса 38 этой группы толщин. Величина этого натяга для всех вальцев 1 регулируется талрепами 10. После центрирования бруса 38 ролик 31, опускаясь под действием гидроцилиндра 32, прижимает брус, который вальцом 30 пода0 ется в просвет между вальцами 1 и 2. Брус, входя в вальцы 1 и 2, приподнимает вальцы 1 за счет их «са овозбегания, при этом двуплечие рычаги 4 приподнимают тяги 5 над амортизатором 13, сжимая пружины 11. После захода бруса 38 между вальцами 1 и 2 вальцы 2 осуществляют надвигание бруса на пилы 3, а прижим при этом обеспечивается за счет массы вальцв 1 и усилия
0
5
пружин 11 (величина усилия прижима регулируется гайками 14). Происходит распиловка бруса. При вы.чоде бруса из вальцов 1 последние опускаются, при этом соответствующие тяги 5 опускаются на амортизаторы 13, исключая те.м самым удары. При поступлении следующего бруса той же группы толщины (с того же потока) работа осуществляется аналогичным образом. При передаче бруса 38 другой группы толщип, поступающего от лесопильной рамы 35 с поперечного передающего устройства 37 в просвет между вальцом 30 и поднятым роликом 31, срабатывает датчик 21, который с помощью указанного релейного узла включает электро.магнитную катушку 19, которая, срабатывая, переключает гидрораспределитель 18 в крайнее левое положение, при котором масло, нагнетаясь в щтоковую полость гидроцилиндра 15, вдвигает шток 16 до .момента, пока гайка не упрется в амортизатор 27 упора 26. Вальцы 1 таким образом устанав тиваются на соответствуюп1ук) группе толщин, поступающих в станок брусьев, высоту, причем несколько меньшую, поступившего в станок бруса этой группы толщин (величина этого натяга для всех вальцев регулируется талрепами 10). После центрирования бруса ролик 31 опускается под действием гидроцилиндра 32 и при- жи.мает брус, который вальцом 30 подается в просвет между вальцами 1 и 2. Далее процесс идет аналогичным вышеописанным образом.
Таким образом, предлагаемое устройство позволяет повысить производительность станка и снизить напряженность труда оператора, за счет указанных более простых и совершенных по сравнению с известными
устройствами средств управ-пеиня и настройки подъема верхних вальцев станка, обес печивающих возможность подачи в станок пиломатериалов одновременно двух групп
толщин, в т.ч. поступающих потоками пз
двух станков, без дополнительных поднастроек в процессе такой подачи при подаче
пиломатериалов из другой группы толщип
Кроме того, такое выполнепие предла гаемого устройства подъема верхпих вальцев позволяет применить вместо двух одпп станок за двумя лесопильными рамами разных просветов (или ленточнопильных станков) для раскроя полученных на них брусьев двух разных групп толщин.
5
Формула изобретения
Устройство подъема верхних валыюв круглоп ильного деревообрабатывающего
Q станка, включающее двуплечие рычаги, на которых закреплены оси вальцов, гидроци- линдр, шток которого связан с двуплечими рычагами посредством тяги, гидрораспределитель и регулятор кода тяги, отличающееся тем, что, с целью улучшения условий труда оператора и повышения производительности, оно снабжено двумя датчиками наличия пиломатериала, гпдрорасп 1едели- тель выполнен электроуправляемым позиционны.м, его входы управления сня0 заны с датчиками наличия пиломатериалов, один из которых установлен слева от продольной оси станка, а дру| ойсправа, причем регулятор кода тяги выполнен в виде связанного со штоком шдроцилинд винта и установленных па нем двух 1 аек,
5 между которыми размеш.ен неподвижный упор.
5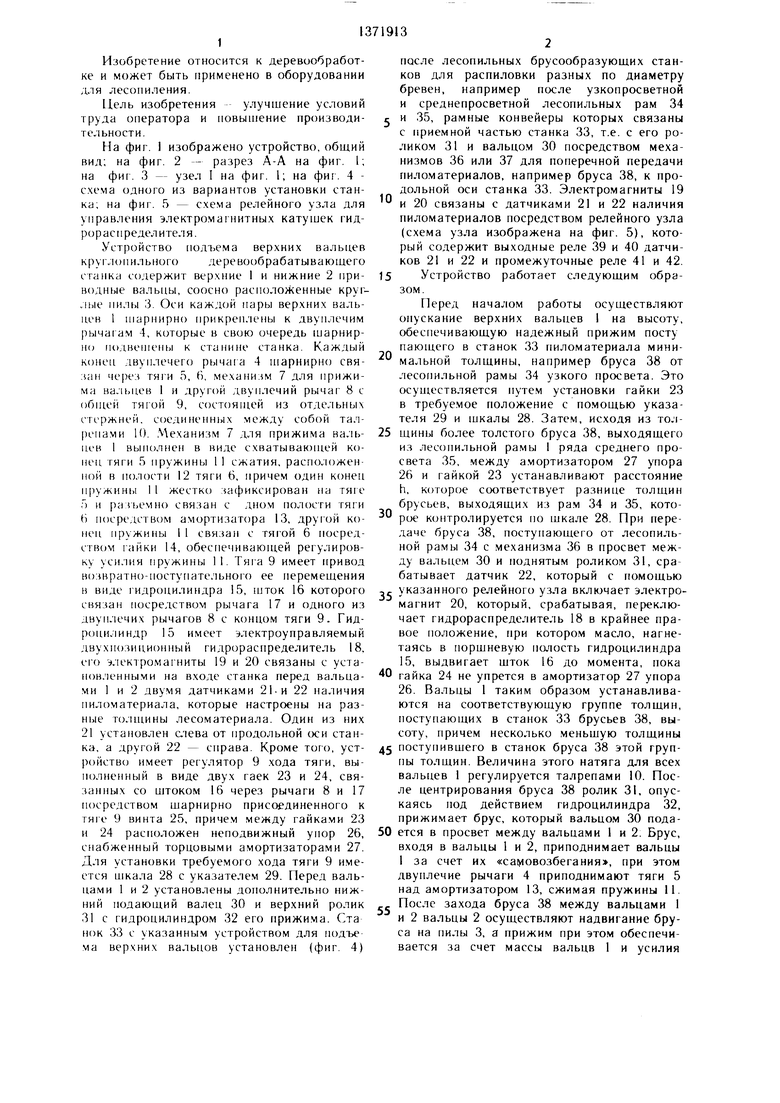
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕСОПИЛЬНЫЙ СТАНОК ДЛЯ ОБРАБОТКИ КРУГЛЫХ ЛЕСОМАТЕРИАЛОВ | 1992 |
|
RU2054351C1 |
| ГОРИЗОНТАЛЬНЫЙ ЛЕНТОЧНОПИЛЬНЫЙ СТАНОК | 1999 |
|
RU2180615C2 |
| Станок для продольной обработки лесоматериалов | 1990 |
|
SU1752548A1 |
| Круглопильный станок для продольной распиловки древесины | 1990 |
|
SU1720859A1 |
| МАЛОГАБАРИТНАЯ ОДНОШАТУННАЯ ЛЕСОПИЛЬНАЯ РАМА | 1971 |
|
SU306956A1 |
| ГОРИЗОНТАЛЬНЫЙ ЛЕНТОЧНОПИЛЬНЫЙ СТАНОК | 1999 |
|
RU2181080C2 |
| Устройство для подачи брусьев в деревообрабатывающий пильный станок | 1988 |
|
SU1701520A1 |
| Станок для продольной распиловки пиломатериалов | 1978 |
|
SU859151A1 |
| СТАНОК ДЛЯ РАСПИЛОВКИ БРЕВЕН И БРУСЬЕВ | 1993 |
|
RU2042504C1 |
| Подающий механизм деревообрабатывающего станка | 1971 |
|
SU442918A1 |
Изобретение может быть применено при деревообработке для обрезки пиломатериалов. Цель - улучшение условий труда оиератора и повьинение производительности. Устройство содержит верхние 1 и нижние 2 вальцы, шарнир}) установленные на двуплечих рычагах 4. Концы последних связаны через тяги 5 и 6, механизмы 7 и двуплечие рычаги 8 с обпи й тя1Ч)й 9, которая соединена со HJTOKOM 16 гпдроцилипд- ра 15 посредством рычага 17. Па входе в станок установлены датчики 21 и 22 на,1и- чия пиломатериала. Регулятор хода тяги 9 состоит из винта 25 с двумя гайками, между которыми установлен неподвижный упор. Перед началом работы с помощью одной из гаек тяга 9 устанавливается в положение, обеспечивающее прижим те1)иала 38 минимальной толшиш.г Затем с помощью другой гайки производится па- стройка .хода тяги для пиломатериалов ГруГ11Ц)1 ТО.ЧШИН. При этом .ход тяги КОП1ролируется по П1кале 28. При поступлении пиломатериала в станок срабатываег один H.i датчиков (21 или 22), настроенный на т()лп1ипу данного 1П1ломатериа,1а. При угом включается один из электромагнитов (19 или 20) распределителя 18 и гидроцилипд- ром 15 верхние вальцы 1 через тягу 9 пере- ме цаются в нужное по, 1оженпе. 5 ил. S (Л
А-А
15
.г
.
25
27
сриг.З
39
(HUZ.
35
Z
ГЮ r
Ф1/г.5
-0
| Устройство автоматического подъема верхних вальцев обрезного станка | 1981 |
|
SU1027034A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Теория п конструкция деревообрабатывающих машин | |||
| Под ред | |||
| Н | |||
| В | |||
| Маковского | |||
| М.; Чесная промынкпенность, 1984, с | |||
| 395, р | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
