27 S
ГС
1- вид
137
Изобретение относится к пневматическим системам и предназначено для автоматического управления последовательным срабатыванием нескольких не- полнительных органов.
Цель изобретения - расширение функ циональных возможностей путем обеспечения работы двух контуров управления.
На чертеже показана пневматическая система управления.
Пневматическая система управления содержит два последовательно установленных управляю1дих распределителя J и 2, два вспомогательных распределителя 3 и 4, первый 5 и второй 6 реверсивные распределители, регулируемую пневмоемкость 7, три пневмокла- пана 8-10, дроссель 11, индикатор 12 давления, первый управляемый пневмо- цилиндр 13 зажима и вторую группу управляемых пневмоцилиндров 14-16.
Система предназначена, например, для испытания изделия 17, которое ус- тановлено в ванне 18, сообщенной с емкостью J9 трубопроводом 20. Пневмо- цилирщры 15 и J6 снабжены пневмоклапанами 21 и 22.
Полости 23-30 управления распределителей 3-6 выполнены разного диаметра. Меньшие полости 23,25 и 28 распределителей 3-5 сообщены с сетью сжатого воздуха. Общий выход 31 уп- равляющих распределителей 1 и 2 сообщен с большей полостью 24 управления распределителя 3 . Регулируемая пневмоемкость 7 сообщена с выходом 32 распределителя 3, входом 33 вспомо- гательного распределителя 4, индикатором 12 давления и через дроссель 11 с большей полостью 27 управления первого реверсивного распределителя 5. Полость 34 управления первого пнев- моклапана 8 сообщена с одним из выходов 35 первого реверсивного распределителя 5. Выход 36 первого пневмо- клапана В сообщен с полостью 37 управления второго пневмоклапана 9, а также с меньшей полостью 30 управления реверсивного распределителя 6 и с его входом 38. Выход 39 второго пневмоклапана 9 сообщен с полостью 40 управления третьего пневмоклапана 10 и с большей полостью 23 управления реверсивного pacпpeдeJп тeля 6. Выход 41 третьего пневмоклапана 10 со- обп1ен с большей полостью 26 управле)
ния вспомогательного распределите ля 4,
Рассмотрим работу пневматической систем управления автоматическим циклом испытания изделий на герметичность в жидкости воздухом высокого давления. Система работает от сети воздуха низкого давления.
При одновременном нажатии на две кнопки (не показаны) происходит смещение золотников рабочих органов распределителей J и 2 в нижнее положение, т.е. происходит переключение распределителей J и 2. Сжатый воз дух из сети через распределители 1 и 2 поступает в большую полость 24 управления распределителя 3 и производит его переключение. Сжатый воздух из Сети через распределитель 3 поступает в большую полость 27 управления распределителя 5 и производит его переключение. Одновременно сжатый воздух через распределитель 3 поступает через дроссель J1 в регулируемую пневмоемкость 7 и начинает ее заполнять в заданное время, устанавливаемое объемом пневмоемкости 7. В течение этого времени оператор должен держать обеими руками кнопки распределителей 1 и 2 в нажатом сос- оянии, так как при отпускании хотя бы одной кнопки золотник соответствующего распределителя 1 или 2 автоматически возвращается в исходное (по чертежу) положение и соединяет большую полость 24 управления распределителя 3 с атмосферой. Поэтому золотник распределителя 3 под действием сетевого сжатого воздуха автоматически переключается в исходное положение и прекращает доступ сетевого сжатого воздуха в большую полость 27 управления распределителя 5. Сжатый воздух из полости 27 через дроссель 11 выходит в еще не полностью заполненную регулируемую пневмоемкость 7, и поэтому под действием сжатого воздуха в меньшей полости 28 управления золотник распределителя 5 переключается в исходное положение, при этом поршень первого управляемого пневмо- цилиндра 13 начинает подниматься, исключая случайное защемление руки оператора.
Из распределителя 5 сжатый воздух из сети начинает поступать в пневмо- 1У1ЛИНДР 13 и перемещать его порщень вниз, производя в конце хода закреп31
ление и герметизацию испытуемого изделия 17, находящегося в ванне 18. Через заданное время регулируемая
пневмоемкость 7 заполняется сжатым
воздухом до величины давления, которое препятствует самопроизвольному переключению распределителя 5 в исходное (по чертежу) положение (под действием сетевого сжатого воздуха, который постоянно поступает в меньшую полость 28 управления распределителя 5). При таком давлении в регулируемой пневмоемкости 7 и н большей полости 27 управления распределите- ля 5 срабатывает индика1ор 12 давления (в его глазке индицируется зеле- ньй или иной цвет), после чего оператор отпускает кнопки управления распределителей 1 и 2, ocвoбo; дaя свои руки,
Одновременно с пос TyHJieinieM в пневмоцилиндр 13 сжатый воздух из сети через раснределитель 5 поступает в полость 34 упранлсния первого пнев-
моклапана
которьп через заданное
время Vнеобходимое /утя гарантированного закрепления и герметизации испытуемого изде:п1я 17) соединяет сеть сжатого воздуха с ПОЛОСТ1.-Ю 37 управле1шя второго пневмоклапана 9, а также меньшей полостью 30 управления распределителя бис его входом 38, при этом распределитель 6 занимает исходное положение. Через распределитель 6 сжатый воздух, поступающий из сети через второй пневмоклапан 9, поступает одновременно в пневмоцилиндр 14,который поднимает емкость 19 сводой,заполняющей по гибкому трубопроводу 20 ванну 18 с испытуемым изделием 17,в пневмоцилиндр 15 нормально закрытого клапана 21 высокого давления и открывает его,в пневмоцилиндр 16 нормально открытого пневмоклапана 22 высокого давления и закрывает его. Сжатый воздух из сети высокого давления носту- пает в загерметизированную камеру испытуемого изделия 17. Начинается процесс испытания на герметичность. Про- должительность его устанавливается настройкой времени срабатывания пневмоклапана. По окончании испытания на герметичность (срабатывает пневмоклапан 9) сжатый воздух из сети че- рез второй пневмоклапан 9 поступает в большую полость 29 управления распределителя 6 н производит его переключение. Одновременно сжатый воздух
из второго пневмоклапана 9 поступает в полость 40 управления третьего нневмоклапа а 10, задержку срабатывания которого настраивают на время порядка 3-5 с, необходимое дпя гарантированного выхода сжатого воздуха высокого давления из внутренних полостей испытанного изделия J7.
Сжатый воздух из распределителя 6 поступает в пневмоцилиндр 14, который опускает емкость J9 в исходное положение, при этом жидкость из ванны 1-8 по гибкому трубопроводу 20 перетекает в емкость 19. Ванна 18 осушается. Одновременно пневмоклапа- ны 21 и 22 возвращаются в исходное ноложение, прекращая доступ воздуха высокого давления в изделие 17 и соединяя его с атмосферой. После срабатывания третьего пневмоклапана 10 сжатый воздух из сети поступает в большую полость 26 управления вспомогательного распределителя 4, производя его переключение. Сжатый воздух из регулируемой пневмоемкости 7 и большей полости 27 управления первого распределителя 5 через распределитель 4 выходит в атмосферу, в результате чег О распределитель 5 под действием сетевого сжатого воздуха переключается в исходное положение. Индикатор 12 давления гаснет, а вся система автоматически возвращается в исходное положение.
Формула изобретения
Пневматическая система управления, содержащая последовательно установленные уг1равляюш 1е распределители, пнев- моуправляемые реверсивный и два вспомогательных распределителя, полости управления которых выполнены с различными эффектными площадями, при этом полость управления первого вспомогательного распределителя подключена к управляющим распределителям, а полости управления реверсивного распределителя - к вспомогательным распределителям, отличающая- с я тем, что, с целью расширения функциональных возможностей путем обеспечения работы двух контуров управления, она снабжена вторым реверсивным распределителем и тремя управляемыми пневмоклапанами, каждый с устройством регу:1ирования времени
5 13721116
срабатывания, причем выход первоголостью управления третьего пневмопневмоклапана сообщен с полостью уп-клапана и с большей полостью управлеравления второго пневмоклапана и сния реверсивного распределителя, а
меньшей полостью управления второговыход третьего пневмоклапана сообщен
реверсивного распределителя, выход5 большей полостью управления второ
второго пневмоклапана сообщен с по-го вспомогательного распределителя.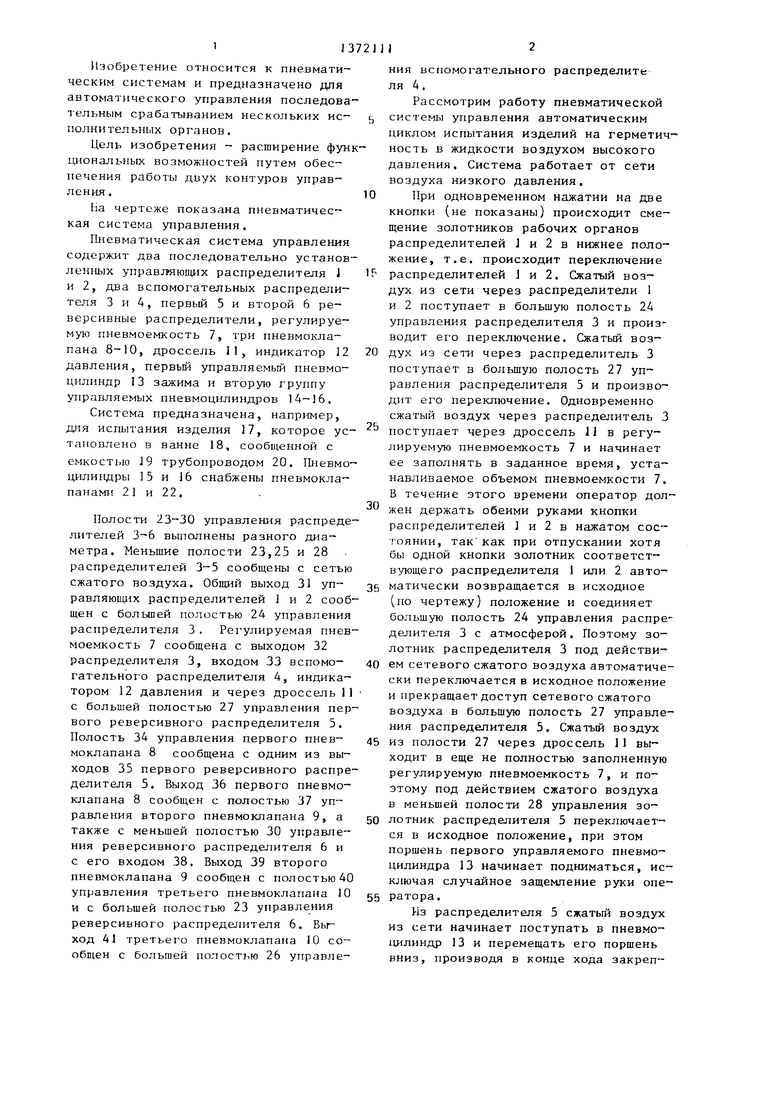
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматическая система управления | 1986 |
|
SU1497398A2 |
| Пневматическая система управления стендами для испытания на герметичность изделий | 1987 |
|
SU1483428A1 |
| Устройство для отделения заготовок от стопы | 1986 |
|
SU1360862A1 |
| Насосная установка с пневмоприводом | 1986 |
|
SU1527416A1 |
| Пневматическое устройство управления весовым порционным дозатором | 1974 |
|
SU532015A1 |
| Пневматический привод | 1988 |
|
SU1596142A1 |
| Пневмогидравлический насос-мультипликатор | 1986 |
|
SU1370328A1 |
| Способ определения плотности жидкости | 1986 |
|
SU1434330A1 |
| Пневмопривод | 1979 |
|
SU877156A1 |
| ПНЕВМОПРИВОДНОЙ НАСОС | 1999 |
|
RU2163981C1 |
Изобретение нредназначено для автоматического управления последовательным срабатыванием нескольких исполнительных органов. Цель изобретения - расширение функциональных возможностей системы путем обеспечения работы двух контуров управления. Для этого она снабжена вторым реверсивным распределителем () 6 и тремя управляемыми пневмоклапанами (П) 8,9 и 10, каждый с устр-вом регулирования времени срабатывания. Выход П 8 сообщен с полостью управления П 9, с меньшей полостью управления Р 6 и с его входом. Вькод П 9 сообщен с полостью управления П 10 и с большей полостью управления Р 6, с к-рой сообщен также вход П 10. Выход П 10 сообщен с большей полостью управления вспомогательного Р 4. Первый реверсивный Р 5 осуществляет управление пневмоцилиндром 13, а Р 6 - группой пневмоцилиндров 14,15 и J6, 1 ил. с (Л
| Устройство для защиты судового трюма от контакта с внешней средой при погрузочно-разгрузочных операциях | 1973 |
|
SU574353A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
