СЛЭ
со
СП
Изобретение относится к машиностроению, а именно к нромын ;1енны 1 роботам, предназначенным, например, лля мног оста- н ом но го обслуживания.
Цмь изобретения - раси нрение техно, i отческих возможностей промьин. робота путем обеспечения поступательного позпппонного перемещения, преоьпнаюшего .ход нор1пня приводного силового цилинд- )а, идоль .1ИПНИ технологического оборудования.
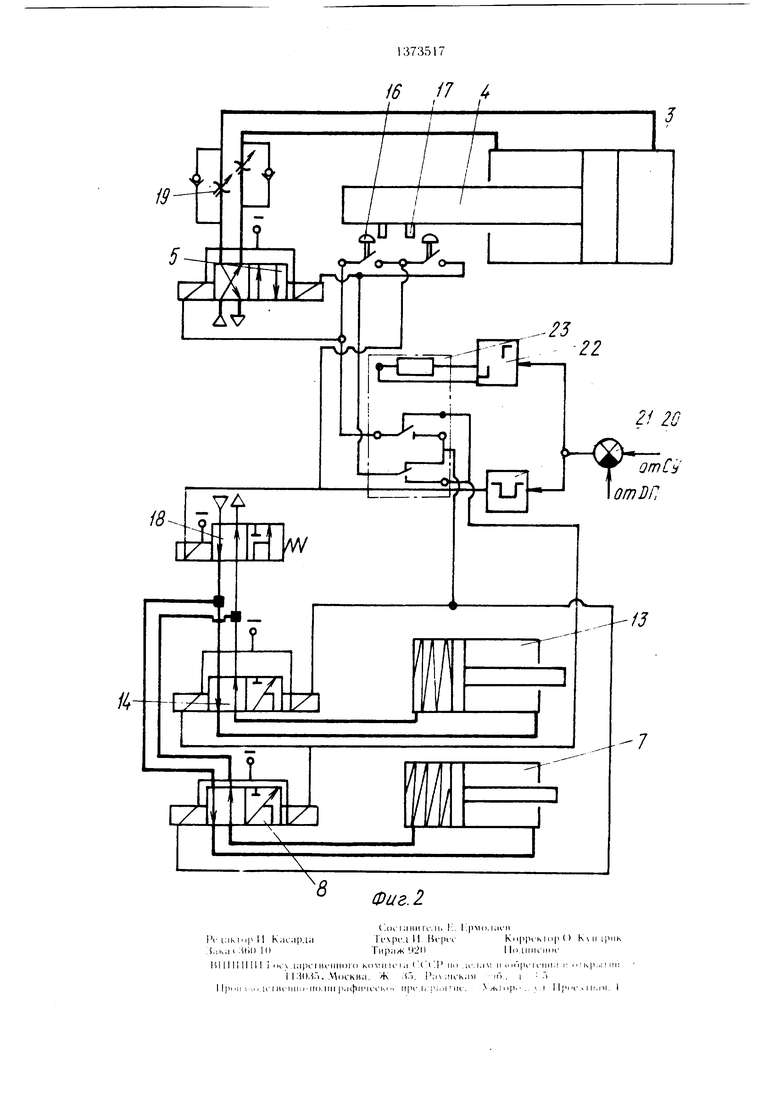
На фиг. 1 изображен промышленный ро- Г)ог, обни1Й вид; на фиг . 2 - улектро- пневматическая схема.
Промышленный робот содержит манипу- ляюр 1. размеп1епный на нодвижной тележке 2, па которой установлены си,. 1овой цилиндр 3 со штоком 4 и электронневмо- распределитель 5. На тележке 2 размеп1ены юрмозпое уст)()йс1во Н с приводом от гормозного цилиндра 7 с лектро- 11ио(морас11ределителем 8, устройство питания в виде ресивера 9 с патрубком 10. 111 ГОК 4 си.ювого цилиндра 3 связан с Hiopoji тележкой II, па которой устапов- .КМ1Ы тормозное уст)1)йство 12 с приводом от )мозног() цилиндра 13 с ь,лект)опневмо- распредели гелем 14 и наконитсмьпое устройство 15.
С.истема управления нромыи1ленно1Ч) ро- бога содержнт микропереключатели Iti, зак- рем.1енные па тележке 2, кулачки 17, закрепленные наДптоке 4 силового цилиндра 3, :. и ктроппевмораспределитель IJ, регу;1и- pyeMiiie д)оссе;1и 19, сумматор 20, ре, 1ей- ные уснлите.чи 21 и 22, поляричовапнс е ptMe 23.
Промышленный робот работает с/к дую- об1)азом.
(.нгпа.т в системе уиравления ог сумма- гора 20 ностунает на усилите., 21 и да- .1СЧ на : лектронневмораспр1мелите, 1И 5,
i, 14, 1Н, у11)авляюшие п(;дачей ог ресивера 9 сжатого воздуха в полости сило- tiofi) 3 и тормозиьгх 7 и 13 цилиндров. Причем напряжепие па :)лектроипевморас- п|)е.1е,1иге,1и тормозных и силового пилинд- ров посгчнает через два мик)оцерек. 1Н)ча- геля 16.
Тч1ким образом реализованы ус.товия, при к(1то|) поршень н гильза си, ового цилиндра . и вместе с ними те.тежки 2 и 11 п)оизводят поочередпо-ностуцате,тьные пе- ремеп1епия, а тормозн1 1е цилиндры 7 и 13 затормаживают и рги тормаживают в начале
и кс.шце 1К)луцериодо11 хода пор|11ня силового цилиндра 3 каждьи свою подвиж 1ую т ележку 2 и II.
Напряжение от микропереключателей 16 к электромагнитам рас11реде,тителей 8 и 14 тор.мозпых цилиндров 7 и 13 проходит через рассогласовапия от сумматора 20 с но- релейного усилителя 22, что позволяет осун1еств.1ятъ пе)екомму гацию указанных связей и тем поступательные движения те.тежек вдоль лппии технологического
оборудования.
В заданно 1роисходи сброс на ряжения с :1,текгромагнитов рас 1реде. Te.Tei i 5, 8, 14, 18. од дейетв 1ем раб() 1ружИП Т())М() , 7 и 13
затормаживают те.К Жки 2 и 11. /1ал1 - 0 lunlniee дв11жеп 1е тележек .ест (.тяется ( команде ог с истс-мы у травле 1ия пос.те TOI4J, как Maintnv. iii io|i I осу К ст- ,тяет- все раммпровгшньк is 1)чке по р;: грхзке i заг|)узке
5 оборудоВа Я. В конечной IIO;il nHH р(И1 Шле1 по Ч) робота ро|1схоляг соедине1 ие ресивера 9 n)t пспюши патрубка 10 с точ 1иком рабоч1 1 средой и, таким образом, 1одза)ядка с 1чать м воздухом.
011ред.тагаемь Й 1ромы|||.,Й К)б(т р ме яется для обс.ужпва 1 1я еско; ЬК 1
единиц обО1)уДОВа 1 1Я с ДЛ ТеЛЬП.1М
обработки, )а 1ример мета.тлорежуших кок.
35
Форму.ш синя
, робот, содержащий под- )) тележку с И1рмоз1 1,м чсгройством
1 рИ 5ОДОМ ОТ СИ. ))() ЦИ., разМС1Пеп 1Ь МИ ia neii мани 1улято)()м и уст- )ойством питан 1я, .)Ное устройство 13дел 1Й систем .ения, огличающии- ся тем. что, с целью техно- .TOI возмож 1остей, он с 1абже|| пирпо связап 1ой со птоком силового ци- .типдра )1()й ге.тежкой с т(.)(1моз- п,м уст)ойств()м, {а которой уста) )е ycT|)oiicTBo изделий.
W /7 4
I
5
| название | год | авторы | номер документа |
|---|---|---|---|
| Передаточная платформа | 1986 |
|
SU1373610A1 |
| Грузозахватное устройство | 1986 |
|
SU1379221A1 |
| Способ садки керамических изделий на печные вагонетки | 1987 |
|
SU1530471A1 |
| Устройство для разрушения монолитных объектов | 1986 |
|
SU1348515A1 |
| Устройство для контроля пробивного напряжения вентильных разрядников | 1986 |
|
SU1337839A2 |
| Стенд для испытания рабочих органов хлопкоуборочных машин | 1985 |
|
SU1340637A1 |
| Устройство для снятия сварочного грата с наружной поверхности труб | 1983 |
|
SU1109215A1 |
| Очувствленный схват промышленного робота | 1983 |
|
SU1104017A1 |
| Полуавтомат для сборки сердечников электрических машин | 1986 |
|
SU1415337A1 |
| Головка для групповой клепки развальцовкой | 1988 |
|
SU1530323A1 |
Изобретение относится к области ма- ц иност)(зения, а именно к нромьни.тенным роботам, иреднанпаченным,, например, для многостаночного обслуживания. Целью изобретения является расширение те.хнологически.х возможностеи iipoMbiin. ieiiHoro рпОога тем обеснечення позиционно о пс|Ч ме11и 1Н1я, превышающе о .ход норшни си.ювого -дн- линдра, вдол1 линии с технологическим оборудованием 11ромы111,1ениьп1 робси Ж1 т манипу.чятор 1, paiNUMiieHHbiii им подвижной те;1ежке 2, на KOTOJUJII c i анов.чен силовой ии,1индр 3 со HiTOKoM 4 и -J.ICK- )Нневмо|1аснреде. П1гс;|е о. I hi 1е. ;сжкс 2 ра:;мен1ены гак/| е тормозное устройство h и ресивер 9 с И). Шток -1 сило- HOIо ци.тин.тра 3 связан с второй ic.ie. Koii 11, на кoт(J)OЙ установле1Н)1 тормозное устройство 12 и 1ел1)Ное yci- ройстьо 15. При поочередной подаче 1. жа TDi o воздуха в по.чости си.кмим о цилиндра 3 и тормозн1)1х ycrpoiicTB 6 и 12 обеспечивается позинионное перемещение манн- 11улято|1а I и иаконитс.) ycTpoiic iiia ID вдо.И) .МИНИН с техно,101 пческим оборчдова- нием. 2 и,1. 1C
51
KI
Фа г. 2
| Авторское ср)идете | |||
| Бункерное загрузочное устройство для брусковых заготовок | 1973 |
|
SU519372A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Г | |||
| Говорящий кинематограф | 1920 |
|
SU111A1 |
| Справочник, Л.: | |||
| alliинocтpoeниe, 1983, с | |||
| Устройство для устранения мешающего действия зажигательной электрической системы двигателей внутреннего сгорания на радиоприем | 1922 |
|
SU52A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
