J3
сд
оо со
I 1 iliU|444MllU ОТИОСИГСЯ к :., pOVUJ
, 1 pDi iuiu) H МОЖ01 бы 11) использовано ii)n спорке сердечника : лектродвигате.пя.
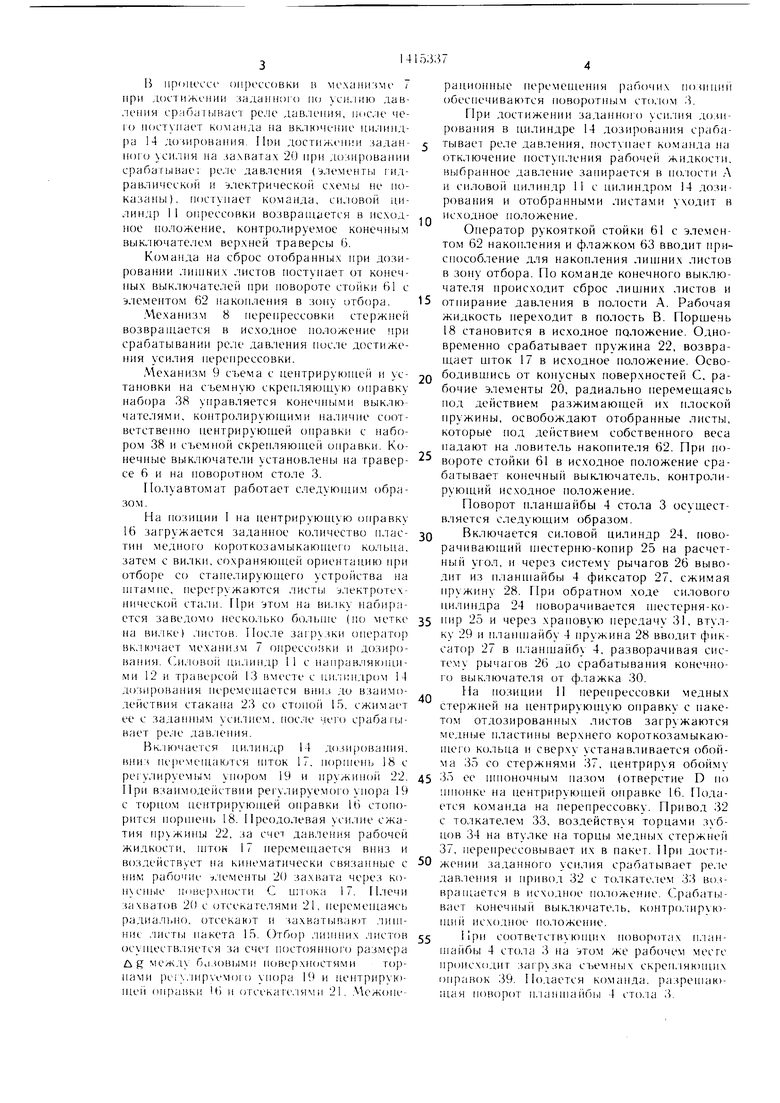
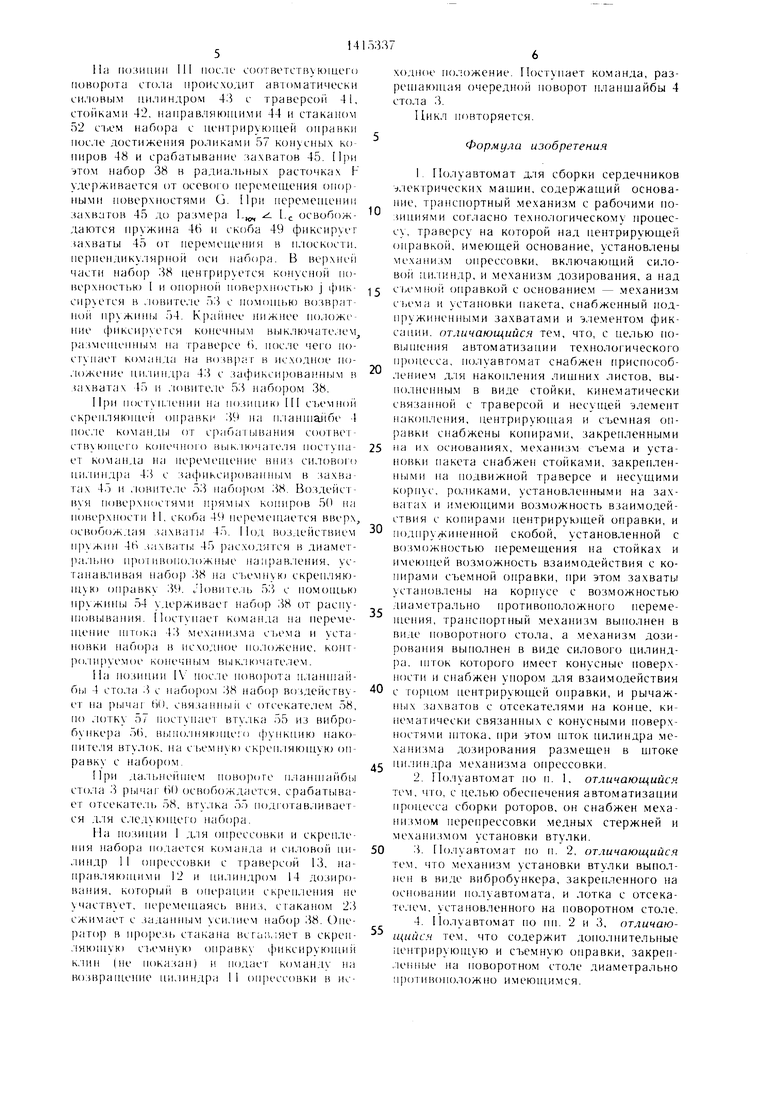
lUvii изобретения исшышение автома- ниации технологического процесса CDOJIKH серлечника11а фиг. 1 иредставлеи полуавтомат, оп- Huiii вид; на фн1 . 2сечение Л Л на
(j)Hr. 1; на (()И1 . , кинематическая схем;, нолуавгомата; на ())И1 4 механизмы oiiiiec- COF1K11 и д()зи 1ован1 Я в рабочем но.южеиии; на фиг. Г) нриснособлеиие для накопле- ння ЛИН1НИХ . 1ИСТОВ; иа ||п11. 6 ме. иеренрессовки медны.х стержиеСк на фи1 . / iexaHH. c liCMa и стано)ки накета; на фиг. М механ1Г(м установки .
Полуавтомат для сборки cepдeчннк(JB )о горой :1Лек 1 ричееки.х машин содержит Ko|i- I, на основашн 2 которого размещен )огный стол 3 с и. 1ан1найбо11 4, на KoTopoi i pa (.имцены 1абочис нозинии 5.
Па траверсе ), жестко соединенно с корпусом 1 че 1ырьмя колоннами, нос, 1едова re. но установ/н ны но хо.т двнжения H.iaHaiaii- бы 4 cTo:ia 3 над рабочими нозиниями о механизм 7 опрессовки и дозирования, механизм 8 iiepeiipeccoiiKii медных стержне, ме- xatHi3M i) еьема н усгановкн набора и механизм 10 установки BTy.iKH.
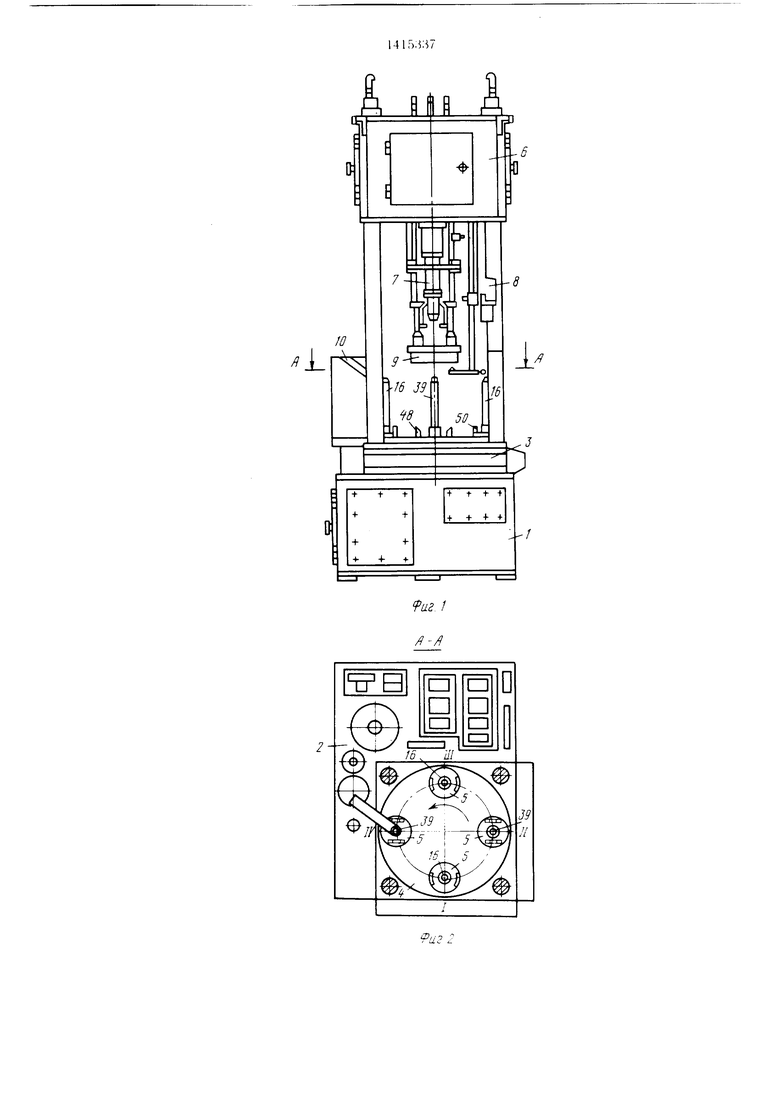
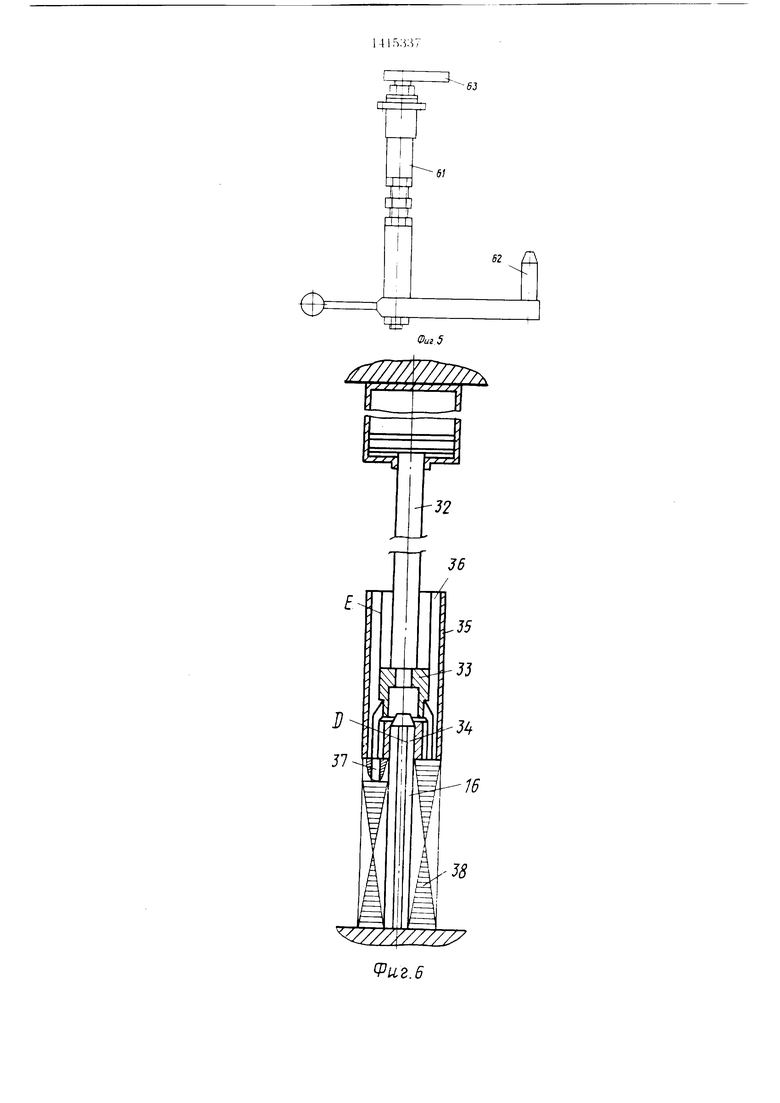
.еханнзм 7 совки и дози|)ования вкл1 1чае 1 cii.U)Boii нн. ншдр 1 1 OHJICCCOBKH, жее1ко C1U1 (aiiHiiiii с на11ра 5: ИК)Н1.имн 12 иод- внжнпн траверсо 13 и цилиндром 14 .юзи- (лона .IHCTOB пакета 15 разметена на пент)ир KHiicJ онранке 1Ь.
(1И no,iocieii .Л и В цн.шндра 14 до- знровання coociio см размен1ен HITOK 17 с кончеными )хнос i ямн и nopHieiib 18, снабженный Кч лн1)смым ))ом 19, ко- 1-(.)рый вьню. 1нен с вошожнос гью взаимоде11- с 1вия с юриом иснтрн 1ук)1пеГ| оправки И). Плечи (ахваши 2(1 с оч секате.тями 21 кн- нема | ичсч ки связаП1.1 с К()Нуспымн пове)х- К1С1ям11 С, пгока 17. Для возврата пггока 17 в iicxo.iHoe но.юженш между ним и но)Н1- нем 18 с1 апив. 1сна нрчжнна 22. работаю- Н1ая на )а5жим. Г.такан 23 вза11моде11ствуе1 не11ос|)еД1-I BeHHo со cr .iHoii лдк тов HaKC ia 1.). Поворо1Н1,н С10Л 3 снабжен силовым ни- .iiiH.ipoM 24, п. iaHHiait6oii -1, HiecrepHeii-KoiHi- 1)ом 25, cncicMoii pi.HiaroB 2ti, (|)нкеатором 27. 11) 28. ivi.iKi)ii 2. i( - 31) и храповой нередаче . i 1.
.ехапн (м 8 He)eiipecci)BKn медн1 гх егср- жнен сга11овлен иа 1 раверсе 1) н COCTOHI Ht HpHBo.ia 32 occBoio ш ремешеиия, толка- ге.;я 3ii. вьн1о,1неннп| о в виде B lyiKn 34 с иа|1 жнымм. .п. становле1Н1о11 соосно 1. ненI puju шнкч очравкои Id над сгонои .inc- гпв наке1а 15, o6oiiMi i 35 с пеитра. и.ным оык рсгне ). И 1елс Зо выно.пи ны па .it, в KOTopi.ix i)a (мена ны мед| ;ые ciep- жни 37 ooMoTKii poiopii, вскры 1ые paci OHKoii. уЛЧ )жпи 37 01 выпадания in o6oii
5
0
5
0
5
0
45
50
55
мы фикси)укугся плоскими пружинами, ко- Topiiie установлены в пазах, выполненны.х на наружно поверхности обоймы 35.
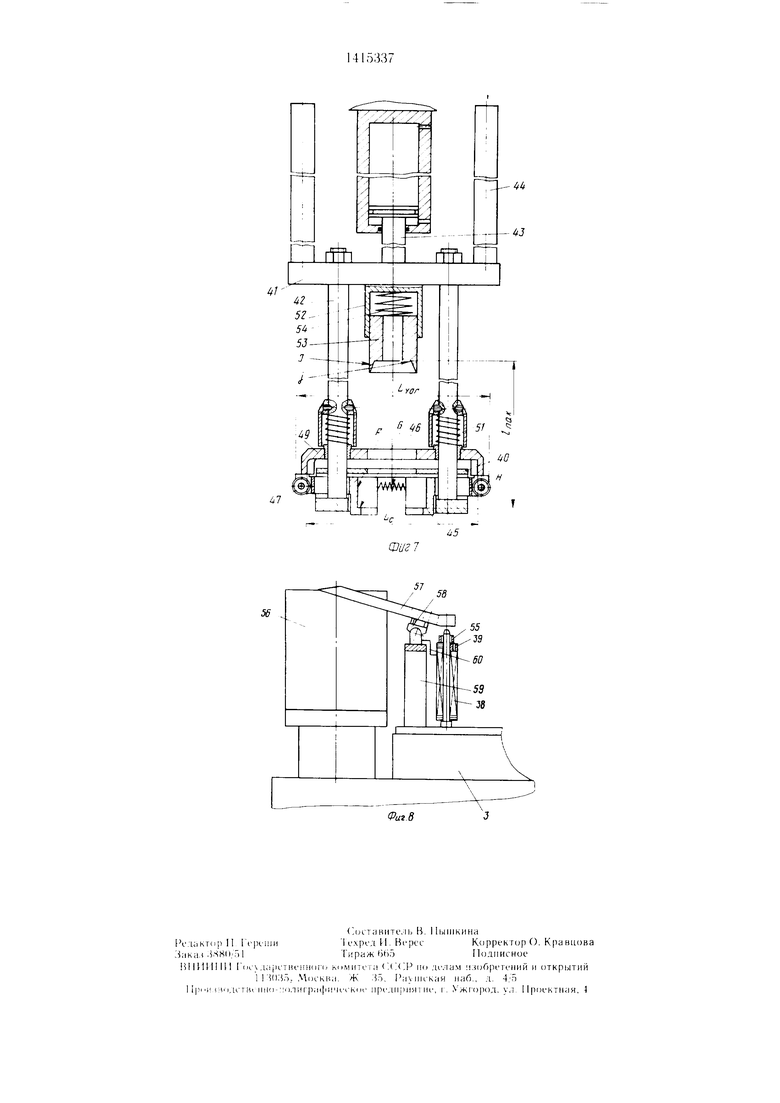
.Механизм 9 съема и установки набора 38 вк,1К)чаег с ьемную екрепляющую оправку 39 корпус 40, жестк(} связанный с траверсой 41, сто11ками 42 и штоком 43 силового цилиндра. Панравляющие 44 жестко связаны с ПОДВИЖНО т|)аверс()й 41. В корпусе 40 yciaHOB.ieiibi захваты 45 с возможностью диа- Mei pa. ibHo 11ротивонолож К) о ереме1цен 1я в плоскост, 1ер11е11Д 1ку,ярно11 оси цакета . 58, за счет упругих 46 и вза- 1модейс1вия с соответствукиц ми копирами ) 47. Л,1Я сохра 1ения орие 1тации и уде) абора в захватах 45 ри съе.ме с 1ен r|)pyi) онравки 16 вы11ол 1ены ра- дн. расточки F и опорные новер.хности (1. I o. HiK 47 размете) а захвата.х 45, к 1 ема ическ взаимодействуют с конус- 1Ь 48 р . ме накета. уста . а ( це 1трирую цеИ онpa iK 16.
(жоба 49 . с воз.можностью )еме цения вдо.Т, оси. стоек 42 и взаи.мо- поверхностеГ П е нрям.1ми к()и- рам 50 р у(, акета, разме1. мн на chOMHoii скрепляющей oii- )авк 39. Перемеи1ен е скобы 49 для фик- сац (ахваюв 45 осу 1еств: яется с ) 51.
В К ) чае 9 стрема и 1е трирования удер- р с )еме с 1е 1трирук)1ей О равки
1() и а С )С М у J С Кре,)1у К) (ку 39 ia6()pa 38 ( етака 52, жестко )1 С травсрсой 41. Под руЖИ е 1 :1, ВКЛЮЧаСТ ,О- ,) 53, В) В U, 11 Дра С В()ЗВ|) 54, ра ЗМ НОЙ в ,
прав,.ем етакане 52 с нозмож()
осевом) е1Н Ме. и ВЗа МОДе11еТ)Я с КО 1уСНО 1 )Xn()) 1 OH(.) ОВе)Хност)Н) с .
. К) вту.пк 55 а с )) ск|1с 1ЛЯ О 1ук) .39 С або- ром 38 вк.1Н)чает закре ле н Г ia 2 КОрПЧСа I В броб Ке) 56, ЛОТОК 57
с отсека е. см 58, .)ii на |нмл,ПЧ МО 1 ВЫСОТС 59. КрОМС
на с(( 59 |1азмс 1е tiO, ,1 С )К) ВЗа М Я С a6l)- ром .i8 1 СВЯЗа, С ОТССКа -слем 58, ( 59 ус . на ()ворог- ом сю. е 3. )() 5()
Д,Я НОДаЧ ВТуЛОК.
Па 1-раверсе 6 установ, pi С |ОСоб, Д. аКО, ЛИСТОВ
i процессе до., которое нредста .Яе- Co6oii, , . руеМуК) 0 ()1, )
с Г))С()1 t) Ж1. СВЯЗа Н К) с :1,.М(.Ч1- (1М 62 акОП. , 4 - 1 1 ком Г)3.
В процесеч опреех овки и K Xciiiи:ии 7 при .и)стиж(. иии заданного H(J cn.inio дав- ,1ения сраба I ыиас Т реле давдепия, нис.пе чего постунает команда на включение цилинд- )а 14 дозирования. HDH достижении заданного усилия на захватах 20 при дозировании срабатывае; pe. ie давления (элементы гид- равличееко и : лектрическо11 схемы не но- казаны). ностунает команда, силовой цилиндр 1 1 О11 1ессовки возвращается в исходное положение, контролируемое конечным выключате.чем верхней траверсы 6.
Команда на сброс отобранных нри дозировании листов постунает от конечных выключателей при повороте CTOIIKH 61 с элементом 62 накопления в зону отбора.
Механизм 8 нереирессовки стержней возвращается в исходное положение при срабатывании реле давления после достижения усилия иерепрессовки.
ЛАеханизм 9 съема с центрируюп1ей и установки на съемную скрепляющую оправку набора 38 управляется конечными выклю- чате.чями, контролирующими наличие соответственно центрирующей оправки с набором 38 и съемной скре11ляюп1е11 оправки. Конечные выключатели установлены на траверсе 6 и на HOBOpcjTiiOM столе 3.
Полуавтомат работает следующим образом.
На позиции I на центрирующую оггравку 16 загружается заданное количество пластин мед}1ого короткозамыкающего кольца, затем с вилки, сг)храняюще11 ориентацию при отборе со стапелирующего устройства на штампе, перегружаются листы электротехнической ста:1и. При это.м на вилку ется заведомо несколько больше (по метк{ на ви. 1ке) /HICTCJB. После загрузки операто) вк.почает механизм 7 опрессоики и дозирования. (л1. 1(зво11 цилиндр 11 с направляющими 12 и траве)сой 13 вместе с цп.чиидром 14 дозирования нсфемещается вниз до взаи.мо- действия стакана 2,} со ст(.)11ОЙ 15. сжимает ее с заданным усилием, noc. ie че1Ч) срабагы- вает реле дав.тепия.
Включается цилиндр 14 дозп()ованпя, вниз пе|)емепи1ются 1пток 17, поршень 18 с регу;|ируемым унором 19 и пружиной 22. При взанмоде11ствии регу.тируемого унора 19 с торцо.м 1ентрируюп1ей оправки 16 стопо- рптся iiopineni) 18. Преодолевая усилие сжатия п)жины 22, за счет давления рабочей жидкск ти, шток 17 перемещается вниз и воздействует на кинематически связанные с ним рабочие г лементы 20 захвата через ко- ипнерхности С цггока 17. Плечи за iiaroB 20 с (.1тсекателями 21, ие)емещаяеь радиально, отсекают и захватывают .чиш- ние , 1исты пакета IF). ()тбо) .чимкщх листов (хчН1еств,.тяется за счет постоянного размера Ag между Ga.iosibiMii 11(1верхи(1стями тор- иами рег,ц1р емого унора 19 и центрцрую- Hieii (1П)авки Ui и отсекаге, 1ями 21. .Межоие0
рационные перемещения рабочих позиции обеспечиваются поворотным CTO,IOM 3.
При достижении заданного уси, П1я дози- ровапия в цилиндре 14 дозирования срабатывает реле давления, поступает комапда на отключение поступления рабочей жидкости, выбранное давление запирается в исх юсти Л и силовой цилиндр 11 с цилиндром 14 дозирования и отобранными листами уходит в исходное положение.
Оператор рукояткой стойки 61 с элементом 62 накопления и флажком 63 вводит приспособление для накопления лишних лиетов в зону отбора. По команде конечного выключателя происходит сброс лишних листов и
5 отгщрание давления в полости А. Рабочая жидкость нереходит в полость В. Поршень 18 становится в ис.ходное положение. Одновременно срабатывает пружина 22, возвращает шток 17 в исходное положение. ОсвоQ бодивщись от конусных поверхностей С. рабочие элементы 20, радиально пере.мещаясь под действием разжимающей их плоекой пружины, освобождают отобранные листы, которые юд действием собственного веса падают на ловитель накопителя 62. При по вороте стойки 61 в ис.чодное положение срабатывает конечный выключатель, контролирующий исходное положение.
Поворот планшайбы 4 стола 3 осуществляется следующим образом.
0 Включается силовой цилиндр 24, поворачивающий ц естерню-копир 25 на расчетный угол, и через систему рычагов 26 выводит из планшайбы 4 фиксатор 27, сжимая пружину 28. При обратном ходе силового цилиндра 24 поворачивается иестерня-ко5 пир 25 и через храповую передачу 31, втулку 29 и п,1ан1пайбу 4 пружина 28 вводит фиксатор 27 в и.чаншайбу 4, разворачивая систему рычагов 26 до срабатывания конечного выключате,1Я от ф,тажка 30.
Па нозиции И перепрессовки медных стержней на центрирующую оправку с пакетом отдозированных листов загружаются медные пластины верхнего короткоза.мыкаю- щего кольца и сверху устанавливается обойма 35 со стержнями 37, центрируя обойму
5 35 ее цп1оночнь)1м назом (отверстие D по ппюпке на центрирующей оиравке 16. Подается команда на перепрессовку. Привод 32 с толкателе.м 33, воздействуя торца.ми зубцов 34 на втулке на торцы медн,1Х стержне(1 37, перенрессовывает и.ч в пакет. При дости0 жении заданного усилия срабатывает pe,ie давления и привод 32 с толкателем 33 вол- врап1.ается в исходпое положенне. Срабатывает конечный выключатель, контро,1ирую- mnii исходное по. южение.
5 При соответствующих иоворотах n, ian- щайбы 4 cTO,ia 3 на этом же рабочем месге происходит загрузка С1)емньг скреп,1яюпи1х onpapiOK 39. Подается комапда. разрешающая поворот n,iaHinaii6bi 4 стола 3.
0
Ha позиции III нос.If cooi ветствчющегп поворота cro.ia происходит авгоматически си. цилиндром 43 с травсрсоГ| 41, стоГжами 42, направляющими 44 и стаканом 52 ciiCM набора с цсчггрируклией оправки noc, ie достижепия роликами 57 ксжуспых копиров 48 и срабатывание захватов 45. При набор 38 в радиальных расточках F удерживается от осевого перемещения onof)- ными поверхностями G. 11ри перемещении захвагов 45 до размера L I.c освобождаются пружина 46 и скоба 49 фиксируег захваты 45 от перемещения в п. юскости, нерпендику.чярпой оси набора. В ве)хие(1 части набор 38 центрируется конусной поверхностью I и опорной поверхностью j 4 ик- сирчется в .1овите, 1е 53 с HOMonibK) возврат- Ht)ii нружи1п 1 54. KpaiiHee нижнее ноложе ние ({)икси)уется К1)нечным выключате.к м., разметенным на граве)се (. после че1 о поступает комапда на ) в исходное по- ,1ожение ни, 1ипдра 43 с зафикси)ованн|)1м i захватах 45 и . ювителе 53 набором 38.
11)и п()ступ.1снии па позицию III c beMiioii скрепляюпн оправки 39 на i,iaHnia)i6e 4 носле команды от срабаг 1 1вания соотвег- стиук)П1е1 о конечного вык. 1К)ча 1 е, 1Я поступает команда на перемещение вниз силового ци,1инд)а 43 с зафикси)оваин|)1м в захва- гах 45 и .ювите. К 53 )М 38. Воздейсг- вуя поверхностями прямых копиров 50 па поверхности И. скоба 49 11еремеи1ается вверх, освобождая захвагь 45. Под В1.)3действие 1 нрчжин 4Н .захваты 45 )асходятся в диаметрально прог и1и)П(), 1ож1Н)1е нап)ав, 1ения, ус- ганав, 1ивая 1або) 38 на с ьемную скреиляю- щую онравку 59. Л()вите.1ь 5:5 с помощью прхжины 54 удерживает набор 38 от расну- П1о ывания. Поступает комапда па переме- HieiHie iHToKa 43 механизма сьема и установки набора в исхо. июе ио. южение, конт- р(1,1ируемое конечным вык. 1ючаге. 1ем.
Па нозинии IV noc. ie поворота iKiaHiiiaii- бы 4 стола 3 с наб())ом 38 набор воздействует на р|)1чаг НО, связа1и1ы11 с отсекателем 58, 110 . ютку 57 постчнает вту,лка 55 из вибробункера 5(), В1,111олняю1цего (})ункцик:1 накопителя втулок, на сьемную скре11,1яющую онравку с набором.
При дальне(инем новороге 11лан1пайб1 1 CTo. ia 3 pi)i4ai 60 освобождается, срабатывает отсекате. п, 58, вту,:1ка 55 подготавливается для следующего набора.
Па нозиции I для онрессовки и скрепления набора нодается команда и силовой цн- ,1индр 1 I онрессовки с траверсой 13, на- нрав,тяюн11гми 12 и цилиндром 14 дозирования, ког()р1,1Й в операции .1ения не участвует, перемещаясь вннз, стаканом 23 сжимает с задан1Н 1м си.1ием набор 38. Оператор в про)езь стакана всга; ..1яет в скрен- . 1як)П1ук) сьемную оправку фиксируюиип к.чнн (не показан) н подает команду на возвран1е 1ие ни:1индра I 1 опрессовки в ис
5
0
5
0
5
0
5
0
55
ходное но. южение. Поступает команда, раз- ре11 аю1иая очередно) поворот нланщайбы 4 стола 3.
Цикл пг)вторяется.
Формула изобретения
. Полуавтомат для сборки сердечников :)лектрических мащин, содержащий основание, транспортный механизм с рабочими позициями согласно технологическому процессу, траверсу на которой над центрирующей оправкой, имеющей основание, установлены механизм онрессовки, включающий сило- Boii цилиндр, и механизм дозирования, а над с ье iHoii оиравкой с основание.м - .механиз.м сьема и установки пакета, снабженный подпружиненными захватами и элементом фиксации, отличающийся тем, что, с целью повышения автоматизации технологического процесса, нсзлуавтомат снабжен приспособ- -чением д;1я наконления лишних листов, вы- но.лненным в виде стойки, кинематически связанрюй с траверсой и несущей элемент наконления, центрирующая и с ьемная оправки снабжены копирами, закрепленными иа их основаниях, механизм съема и установки пакета с 1абжен стойками, закрепленными иа подвижной траверсе и несущими корнус, ро.чиками, установленными на захватах и имеющими возможность взаимодействия с конирами центрирующей оправки, и Н)днружиненной скобой, установленной с возможностью перемещения на стойках и имеюн1ей возможность взаимодействия с копирами съемной оправки, при этом захваты установлены на корнусе с возможностью диаметрально противоположного перемещения, транспортный ме.ханизм выполнен в виде иоворотногч) стола, а .механизм дозирования выполнен в виде силового цилиндра, нггок которого имеет конусные поверхности и снабжен унором для взаимодействия с )M центрирующей онравки, и рычаж- Н1,1х захватов с отсекателями на конце, кинематически связанных с конусными поверхностями щтока, при этом IHTOK цилиндра механизма дозирования размещен в щтоке ци. индра механизма опрессовки.
2.Г1()луавтомат по н. 1, отличающийся тем, что, с целью обеспечения автоматизации процесса сборки роторов, он снабжен механизмом неренрессовки медны.х стержней и механизмом установки втулки.
3.Полуавто.мат но п. 2. отличающийся тем, что механизм установки втулки выполнен в ниде вибробункера, закрепленного на основании иолуавтомата, и лотка с отсека- те,ем, установленного на новоротном столе.
4.Полуавто.мат но пн. 2 и 3, отличающийся тем, что содержит дополнительные 1ап1трирующую и ст емную оправки, закреп- .leHfiiiie на поворотно.м столе диаметрально
ивоноложно имеющимся.
«L
1
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Полуавтомат для сборки пакетов сердечников электрических машин | 1982 |
|
SU1053227A1 |
| Устройство для сборки сердечников роторов электрических машин | 1987 |
|
SU1557637A1 |
| Полуавтомат для электронно-лучевой сварки | 1984 |
|
SU1281359A1 |
| Полуавтомат для сборки пакетов сердечников электрических машин | 1986 |
|
SU1387111A1 |
| Автомат для изготовления пакетов магнитопроводов электрических машин | 1984 |
|
SU1334294A1 |
| Вертикальный давильно-отрезной полуавтомат | 1982 |
|
SU1082520A1 |
| Полуавтоматический станок для совместной обработки грифа и корпуса музыкальных инструментов | 1986 |
|
SU1339016A1 |
| Способ сборки редукторов и устройство для его осуществления | 1990 |
|
SU1754403A1 |
| Станок для фрезерования мест сопряжений деревянных деталей | 1984 |
|
SU1219350A1 |
| Полуавтомат для набора сердечников трансформаторов | 1984 |
|
SU1259346A1 |
Изобретение относится к :)лектрома111и- ностроению и м.б. использовано при сборке сердечников электродвигателей. Цель изобретения - обеспечение автоматизации технологического процесса сборки сердечников. Для этого полуавтомат для сборки сердечников электрических машин содержит поворотный стол 4. Па нем раз.мешены рабочие позиции. Па траверсе 6 иосле механизма 7 опрессовки и дозирования по движению стола установлено приспособление для накопления лишних листов со стойкой 61 механизма 9 съема и установки набора. Его захваты 45 установлены на стойках 42 с возможностью диаметрально противоположного перемещения в плоскости, перпендикулярной центральной оси набора 38, и кинематически связаны с роликами 47. Ролики 47 взаимодействуют с конусными конирами 48 на основании центрирующей оправки 16. Скоба 49 взаимодействует с прямыми копирами 50 на основании съемной скрепляющей оправки 39. Па стене 4 установлен механизм установки втулки. Все механизмы, используе.мые в полуавтомате, построены таким образом, что обеспечивают ориентацию пакета и набора сердечника в процессе выполнения операций. 3 з.п. ф-лы, 8 ил. i сл
2-faz. / /} /)
иг.
Ф
3
-63
S2 A
4ШШ
//Щ///7 иг.б
ui
57
5д
55
Фаг 8
| Устройство для сборки пакетов магнитопроводов электрических машин | 1983 |
|
SU1153378A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Полуавтомат для сборки пакетов сердечников электрических машин | 1982 |
|
SU1053227A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
