Изобрсчояие относится к робототехнике, в частности к c6op04i i i роботам, и может быть исио.1ьзоваио ж) нсех случаях, когда требуется силовое очувств.пеиие )оботов.
Известен схват нромьнилеиного робота, который содержит зажимные р1)1чаги, снабженные 1убками. и датчик усилия сжатия, причем одна из губок ноднружинену относительно зажимного рычага и снабжена жестко связанным с ней одним концом стержнем, второй конец которого расположен в рабочей зоне датчика усилия сжатия |1|.
Недостатком известного устройства является то, что оно не может быть применено для контроля усилий, возникаюни1х при взаимодействии захвата с объектами среды, в том числе и с объектами, на которые наложе1 ы внеишпе жесткие связи.
Целые изобретения является расн1ирение фупкциопа.11)Ных возможностей схвата промышленного робота.
Указанная пе.чь достигается тем, что в очувствлеюю.м ехвате промьипленного робота, содержащем зажимные рычаги, енабженHijie губками, и датчик усилия, при этом одпа губка поднружинеиа относительно зажим пого рычага и па пей установлен стержень, связаппый с датчиком усилий, каждая губка вьпюлнена из трех, расположенных нарал;|ельпо и подпружиненных одна относите:1ьно другой пластин, при это.м каждая пластина установлена подвижно в одном нанравлепии относительно неремен1епия соседней пластины, а направления перемеП1.епий крайних пластин взаимноперпендикулярны, причем в двух пластинах подвижной губки, расположенных со стороны датчика усилий выполнены отверстия, а стержень размеп1ен в отверстиях и жестко связан одним концом с третьей пластиной, при этом датчик усилий вынолпен в виде четырехг)анной усеченной зеркальной 11И)амиды, установленной на другом конце стержня сооспо с 1ПГМ, (1отоэлектронпо1о преобразователя, содержанцто источник сходянимося пучка света II четыре (|к), раеположенньгх С(Я)Т етствен но протпЕ) рапей пирамиды.
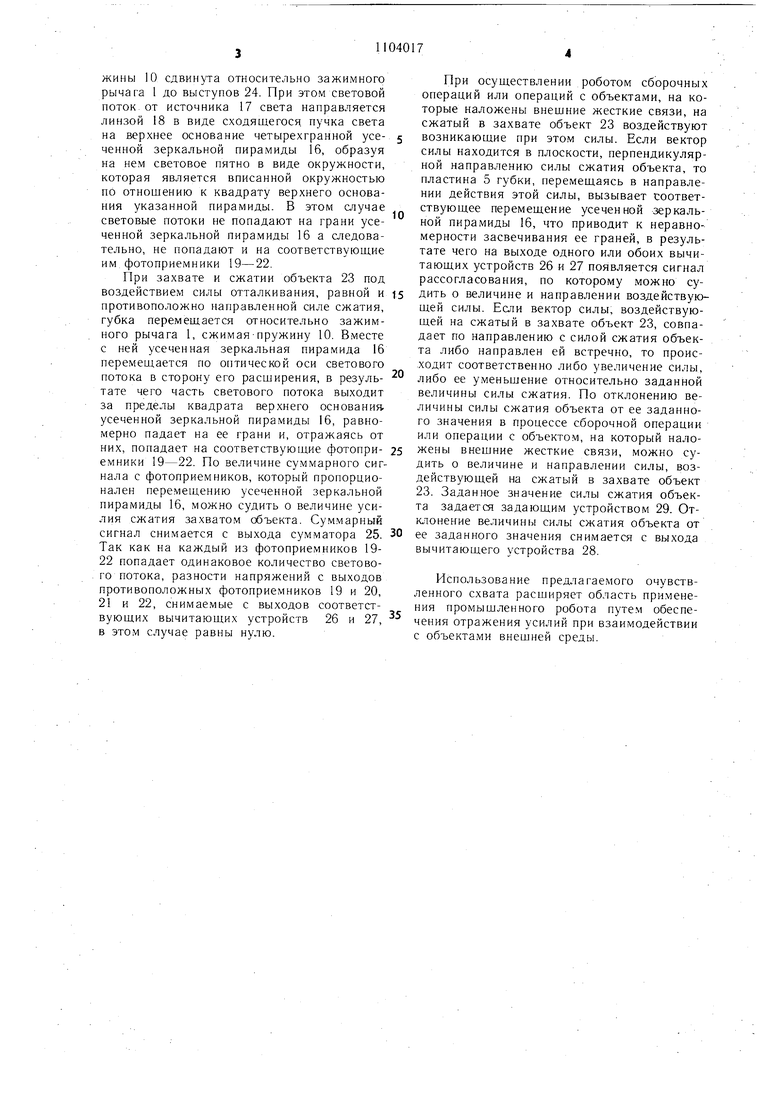
На фпг. 1 изображен очувстачеп ны и схват иромын.1енного робота, разрез; на ({)иг. 2 -электрическая б.1ок-схема обработки сигналов от датчика усилий.
Оч у в сг B.i еп и iii и схват п ро м ы i п л( и i ю го робоча содержит зажимные рыча1и i и 2 (фиг. 1), на которых расио,1ожены две губки: подвижная и неподвижная. Каждая губка выпо.1псна ИЗ т|Чх, расположепньгх нарал;1е.;п,по нластин 3 5, связанных между собой взаимно нерчгендикулирпымп на рами и)ужпн () и 7. Каждая н.пастипа уетанов.чена is П1ариковых паиравляюгцих y.ieмептах 8 п 9 подвижно в одпом направлении отпосите.льпо сосед..чей иластипы, а паправле1ч-1Я пере; имцеп11И крайп)х нластип взаимпо перпепдикуляр1-:ы. Подвижная губка связапа с KojMycoM зажимно1Ч) рычага с по.мо1пьк) пружип1 1 II). (тержен) 11 п жкрен;1ен одпи.м концом к н.пастиие п нодвижной губки п расп(Х1ожен в отверстиях 12 - 14 соответетвеппо зажимного рьнгага и пластип 3 и 4. Датчик 15 си,:|пй выпо.Гнеп в виде четырехгранной усечепгюй зе|жа„1ьной inipaмиды 16, уста нов,1енп()й на другом конце стержня 11 соосно с ни.м, (|)ото: лектроп1юго преобразог ате;1я, включающего источник сходян1егося пучка света, состс ящегч) пз источника 17 света, линзы 18, и четглрех фот(:1Н)иемпиков 19--22 (фиг. 2), раено.1ожепн1)1х соответственно против четырех граней нирамиды. Позицией 23 обозначен 3axBaTi BaeNibm об1)ект. Па )Ь чагс 1 вынол11е(1Ы libicTyiii) 24 д,1Я ог)аничения пе)е.мен1епия ii:iaeTnii)i 3.
Электрпческая б/юк-схема г)браб()гки С11гна;к в от датчика уси.лий (. 2) содержит сумматор 25, первое, второе и третье вычитающие устройства 26-28 сооп етственио и задающее устройство 29, выход которслч) связан с из входов вьгчитающего уетройства 28, второй X(JД которого соединен с ввгходом сумматора 25, пе|1вый 15ХОД которого соеди1КП с фотоприемник(хм 19 и одним из входог) выч1гга:още1о устройства 2(), вход с 1рог(Л1риемпиком 20 и со вторым входом вычитающс ) уст)ойства 2(). третий входс (фотопрпемпиком
22 и JДИи.м из входов В,1читак)ще1о устройства 27, а четвертый вход с (|)отопрпе.мннком 21 и со BT())i;iM входсш В1 1читаю1пего устройства 27. П;1астина 5 губки схната имеет воз.можпоеть перемещения относительно пластины 4 15до,чь шариковых нап)авляюп1их -:)Леме1ггов 8 1Ч).1ьк() в одпом )авле1:ип, оирсде.пяемом пружинсн 6, а пласгтгпа 4 .може1 перемсчпатьси относитс.нлю ц.1астинь1 i вдо;гь игарнковых панра 5.1яюни1х элементов 9 так/ке то.чько в одном паправлепип, определяемом 11ружиной 7. Так как пруж.пны 6 и 7 взаи.мио нерпендик,;яр}П)1, то 1пастииа Г; может перемеиипТ)СЯ нара.1лел1)1Ч) н.ластине 3 в любом па 1ра ленпи. вг. соответствующее HCpeMemeinie четырехгранной усече1П1ой зерка,1ьн1)й )амнды 16, нап)отив г)апей которой расположены соответствующие (})отоприемнпки 19 22 образом, чтобь при смещепип noc.KMneii (Т етовой ноток от ncToifniKa 17 ciieT.i. попадаюпиж па ее грани, отража.кя па cooTiieTCiiiyiouuie (|)отонр11емпикя И) 22. (.матор 25 и B,Iчитающие у|-тройст1 а 2i)-28 мч-лд бьпт выполпепы па оснг)ве О11ерацно;:пых уснлителей. Задающее устройс s-u) 29 ) вын(),1пепо в виде lioTChiiaoMeTpa.
()чунств.,1Й схват iipoMr.iin.ieiiiioiо робо r;i )або|аст с.педх и;щим образом.
И исходном (.oci ()ЯП1П перед 15-1ят 1ем обьжины 10 сдвинута относительно зажимного рычага 1 до выступов 24. При этом световой поток от источника 17 света направляется линзой 18 в виде сходящегося пучка света на верхнее основание четырехгранной усеченной зеркальной пирамиды 16, образуя на нем световое пятно в виде окружности, которая является вписанной окружностью по отношению к квадрату верхнего основания указанной пирамиды. В этом случае световые потоки не попадают на грани усеченной зеркальной пирамиды 16 а следовательно, не попадают и на соответствующие им фотоприемники 19-22. При захвате и сжатии объекта 23 под воздействием силь отталкивания, равной и противоположно направленной силе сжатия, губка пере.мещается относительно зажимного рычага 1, сжимая-пружину 10. Вместе с ней усеченная зеркальная пирамида 16 перемещается по оптической оси светового потока в сторону его расщирения, в результате чего часть светового потока выходит за пределы квадрата верхнего основания, усеченной зеркальной пирамиды 16, равномерно падает на ее грани и, отражаясь от них, попадает на соответствующие фотоприемники 19-22. По величине суммарного сигнала с фотоприемников, который пропорционален перемещению усеченной зеркальной пирамиды 16, можно судить о величине усилия сжатия захватом объекта. Суммарный сигнал снимается с выхода сумматора 25. Так как на каждый из фотоприемников 1922 попадает одинаковое количество светово, го потока, разности напряжений с выходов противоположных фотоприемников 19 и 20, 21 и 22, снимаемые с выходов соответствующих вычитающих устройств 26 и 27, в это.м случае равны нулю. При осуществлении роботом сборочных операций или операций с объектами, на которые наложены внещние жесткие связи, на сжатый в захвате объект 23 воздействуют возникающие при это.м силы. Если вектор силы находится в плоскости, перпендикулярной направлению силы сжатия объекта, то пластина 5 губки, перемещаясь в направлении действия этой силы, вызывает соответствующее перемещение усеченной зеркальной пирамиды 16, что приводит к неравномерности засвечивания ее граней, в результате чего на выходе одного или обоих вычитающих устройств 26 и 27 появляется сигнал рассогласования, по которому можно судить о величине и направлении воздействующей силы. Если вектор силы, воздействующей на сжатый в захвате объект 23, совпадает по направлению с силой сжатия объекта либо направлен ей встречно, то проис.ходит соответственно либо увеличение силы, либо ее уменьшение относительно заданной величины силы сжатия. По отклонению величины силы сжатия объекта от ее заданного значения в процессе сборочной операции или операции с объектом, на который наложены внешние жесткие связи, можно судить о величине и направлении силы, воздействующей на сжатый в захвате объект 23. Заданное значение силы сжатия объекта задается задающим устройством 29. Отклонение величины силы сжатия объекта от ее заданного значения снимается с выхода вычитающего устройства 28. Использование предлагаемого очувствленного схвата расширяет область при.менения промышленного робота путем обеспечения отражения усилий при взаимодействии с объектами внешней среды.
Фиг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1980 |
|
SU918086A1 |
| Очувствленный схват промышленного робота | 1984 |
|
SU1180263A1 |
| Очувствленный схват робота | 1990 |
|
SU1815223A1 |
| Устройство для задания опорной световой плоскости | 1987 |
|
SU1508094A1 |
| Схват промышленного робота | 2023 |
|
RU2813251C1 |
| Робототехнологический комплекс | 1985 |
|
SU1289677A1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ МИКРОСХВАТ | 2004 |
|
RU2266190C1 |
| Схват промышленного робота | 1983 |
|
SU1085810A1 |
| Адаптивный схват промышленного робота | 1979 |
|
SU872255A1 |
| ПАТЕНТИО- Т'ХКИЧЕСКАЯ БИБЛИОТЕКАЮ. М. Голубовский10 | 1966 |
|
SU181336A1 |
ОЧУВСТВЛЕННЫЙ СХВАТ ПРО МЫШЛЕННОГО РОБОТА, содержащий зажимные рычаги, снабженные губками, и датчик усилий, при этом одна губка подпружинена относительно зажимного рычага и на ней установлен стержень, связанный с датчиком усилий, отличающийся тем, что, с целью расширения функциональных возможностей каж ,7 Ш 3 дая губка выполнена из трех, расположенных парал/юльно и подпр |,:иi : :i-ibx ояи-а относительно другой подвижных пластин, при этом каждая пластина установлена подвижно Б одном ьанравлепп.-, относительно перемещения соседней пластины, а направления перемещений крайних плястин взаимнопериендикулярны, примем в двух пластинах подпружиненной губки, расположенных со стороны датчика усилий, выполнены отверстия, а стержень размещен в этих отверстиях и жестко связан одним концом с третьей пластиной, при этом датчик усилий выполнен в виде четырехгранной усеченной зеркальной пирамиды, установленной на другом конце стержня соосно с ним, фотоэлектронного преобразователя, содержащего источник схо- р дящегося света и четыре фотоприемника, расположенных соответственно против четырех граней пирамиды. 3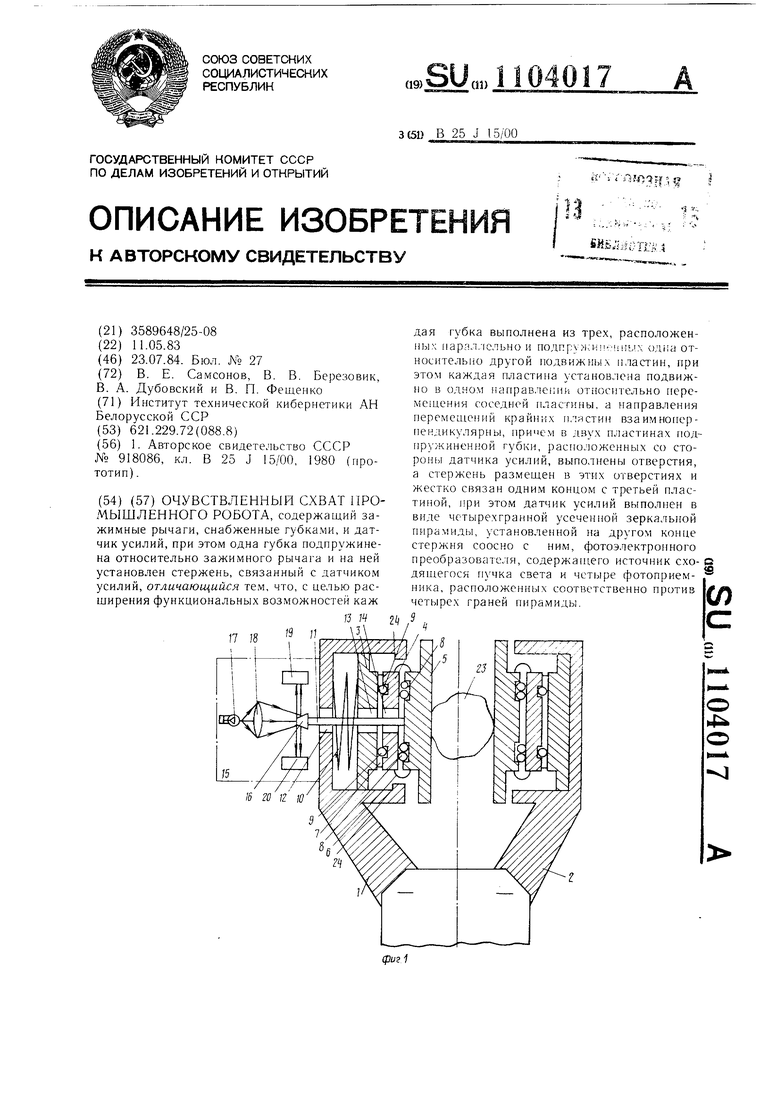
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захват промышленного робота | 1980 |
|
SU918086A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
