(Л
оо
со
05 О
п
1
Изобретение относится к механи;1аиии производственных процессов в лесном хо- ujiicTEie и может быть использовано в лесной нрохп ниленности.
Цель изобретенияупрощение конv r|iyKlUlH.
На (fiHi. 1 изображено предлагаемое уст- (К)йс IBO, вид сбоку; на фиг. 2 - вид Л на фи|-. 1; на фиг. 3 вид Б на фиг. 1; на фиг. 4- телескопический рычаг, разрез; на фиг. 5 KpeH.ieiuie устройства иа тракторе.
стройс11и) для бесчокерной трелевки дерет.ев сосгоит из несущей балки 1, к отиерсгии которой закреплены ось 2 и фик- с;п()|) 3, устанавливаемый в отверстие 4, а также чамка 5 автосцепки, закрепленная жестко в вертика.чьной продольной ii.ioi. косги иод уг. юм нлсх кости 1,-|Хвага (к
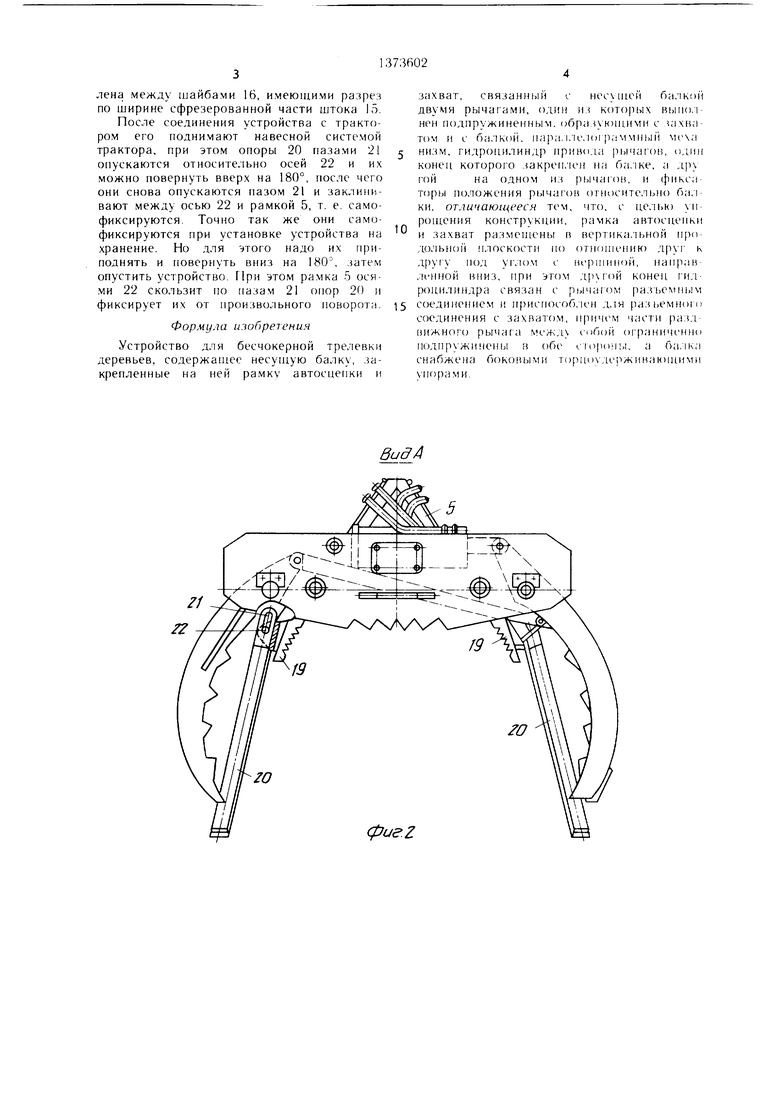
Несущая балка 1 и захват 6 осями 2, 7 9 снизаны соответственно с рычагами 10 и II. { ычаги 10 и 11 вместе с зах- наюм Г) и несущей балкой 1 образуют :ia)a. раммный механизм. Рычаг 1 I выполнен из телеекопических частей. Фикса- гп) Л О1 )аничивает поворот рычага И) при yciaiioiiKc его в отверстие 4. На не- б:1, 1 закреплен на оси 12 гид- . 1ии.1 13 привода параллелограм.мных }). второй конец которого через ось 7 I Df линяет гя с рычагом К) или через ось 14 ( KI v dv. .захвата 6. Телескопически11 рыча; II состоит н.ч Н1тока 15 с лысками, ра;;и Ч1ых шайб 16, пружины 17 и корпуса IS.
Части телескопического рычага 1 1 (фиг. 3 и 4) подпружинены с целью сохранения 1.;||гт()янно11 д.мины ei o при отсутствии на lii ii) вп i тействующей силы. Это б|)1вает в inNH-fii наведения захвата 6 на запас д| свесииы и в тра)1снортном положении без ipvia. При ()м длина рычага 11 в свободном coi. гоя1Н1И равна длине рычага И), угп 11(Ч1 Н менн()е условие рычажной иара;1- ЛСЛ01 раммио системы. Несущая ба.тка 1 сиапжеиа снизу торцовыравнивающими упорами 19 Для установки на хранение устройства, на рамке 5 автосцецки :1акреп- . iioiiopoTHbie самофиксирующиеся опоры 20 Опоры 20 (фиг. 1) - это домк |)аты, которые необходимы для установки ycTpnia-гва иа хранение и правильного нос,те.1 ющего соединения его с трактором. С)и(1()а 20 имеет на верхнем конце паз 21, а на рамке Г) авгосненки закреплена ось. 22.
Ус1 1ойстн() работ ает следующим образом.
.Лвгогпепкой трактора соединяются с ),iMKi)ii Г) т )е,тевн1ика.
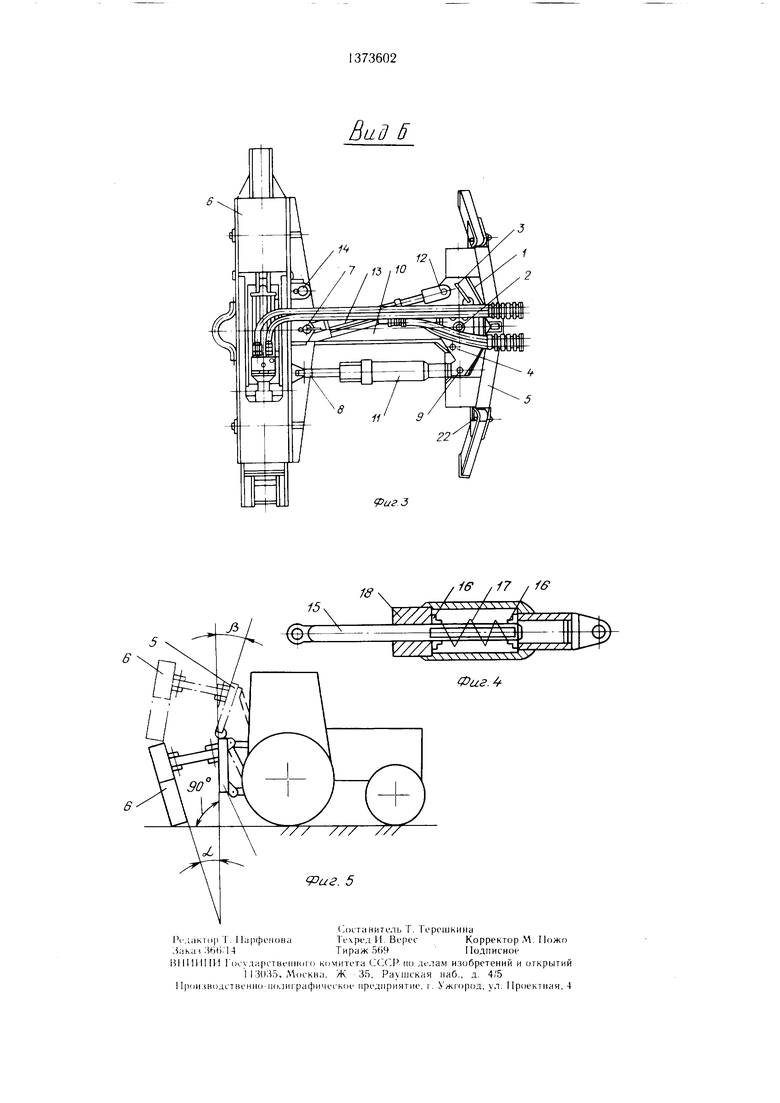
Вершина уг.та ос направлена . |ол |i наклона рамки автосцепки получается меж.ту н, 1оскостью ра.мки 5 авто- щенки ((|)И1. I и 5) в момент соединения тракюра с устройством, т. е. в :iTO время н. юскость рамки 5 автосцепки находится всегда только в вертикальн(.)м ноло1373602
0
5
0
5
0
5
0
5
0
5
несу- и иодженин, а второе положение рамки автосцепки - когда тракторной навесной системой устройство поднимается в крайнее верхнее положение.
При вывозке деревьев волоком фиксатор 3 убирают. Сведенным захватом 6 под- торцовывают пачку деревьев и затем наводят захват на пачку деревьев. При не- соосной наводке клещей захвата б на пачку гидроцилиндром 13 положение его корректируется. Торцы деревьев заводят в захват 6 так, чтобы они не попали в зону щей балки 1, захватывают пачку нимают трелевщик с грузом.
В результате гибкости стволов деревьев в пачке и возможности упругого перегиба их в захвате при , а также из- за размещения плоскости захвата под угло.м 6° верпжной угла вниз к плоскости рамки 5 автосцецки создается условие гарантированного зажима пачки из-за упругого перегиба в захвате и размещения верижн деревьев на волоке. При вывозке пачки но кривой трассе захват 6 за счет изменения длин1)1 рычага 1 совершает повороты.
В случае трелевки деревьев на весу торцы их заводят под несущую балку 1 между торцовыми упорами 19 и поднимают зажатую пачку, при вершины деревьев поднимаются над волоком, так как перегиб деревьев в захвате отсутствует, и он, вместе с тем, становится неиоворотны.м.
При необходимости взятия деревьев, размещенных под углом к волоку, уста- }1авливают фиксатор 3 в отверстие 4, блокируя тем самым поворот рычага И), а гидроцилиндр 13 поворачивают относительно оси 12 и закрепляют на оси 14. После такой наладки захват 6 может быть повернут управляемо на необходимый угол вокруг оси 7.
При у1 ловой управляемой наводке, когда гидроцилиндр 13 с оси 7 переставляется на ось 14 и фиксируется рычаг 10 фик- саторо.м 3, поворот захвата 6 в ту или другую сторону гидроцилиндром 13 вызывает удлинение или укорочение рычага 11, то же ироисходит и при транспортировке воза древесины волоком.
В случае же поперечной управляемой наводки, когда гидроцилиндр 13 установлен, как показано на фиг. 3, а фиксатор 3 вынут, при выталкивании или втягивании штока гидроцилиндра 13 рычаг 10 поворачивается вокруг оси 2 и переносит захват 6 в ту или другую сторону. При это.м телескопический рычаг 11 за счет пружины 17 удерживает свою длину неизменной и равной длине рычага 10, это и обеспечивает параллельный перенос захвата 6 Таким образом, для выполнения своей функции те.песко- нический рычаг 1 имеет IHTOK 15 (фиг. 4), подпружиненный пружиной 17 относительно корпуса 18. Для этого пружина 17 вставлена между шайбами 16, имеющими разрез по ширине сфрезерованной части штока 15. После соединения устройства с трактором его поднимают навесной системой трактора, при этом опоры 20 пазами 21 о 1ускаются относите.чьно осей 22 и их можно повернуть вверх на 180°, после чего они снова опускаются пазом 21 и заклинивают между осью 22 и рамкой 5, т. е. самофиксируются. Точно так же они самофиксируются при установке устройства на хранение. Но для этого надо их приподнять и повернуть вниз на 180°, затем опустить устройство. При этом рамка 5 осями 22 скользит по пазам 21 опор 20 и фиксирует их от произвольного поворота.
Формула изобретения
Устройство для бесчокерной трелевки деревьев, содержап1ее несуп1ую балку, закрепленные на ней рамку автоспепки и
0
захват, связанный с несушей 6a, iKoii двумя рычагами, один и; которых выпо.- нен подпружиненным, обра.п К)пи(мн с захватом и с ба. 1К()й, 11ара.1Л1.о1 i. iMMHbiii низм, гидроцилиндр привода рычагчх;, один конец которого закреп, 1(. н на ба.1ке, а др гойна одном из рычагов, и (})икса
торы положения рычагов огносите,тьно 6a,i- ки, отличающееся тем, что, с целью п- рошения конструкции, рамка автосцепки и захват размешены в вертика. 1ьной njio- .дольной плоскости по отношепию друг к д)угу под угмо.м г Н ршиной, напран- Л1 нной вниз, при этом конец гид- роцилнндра связан с р1 чагом разьемцым соединением и нриспос-об,1ен д,Я разьемног соединения с захватом, причем части раздвижного рычага межд с кГюй ()| раниченн() 1юдпр жинены в обе стороны, а ба. 1ка снабжена боковыми т()М1о дсм живакицими упорами.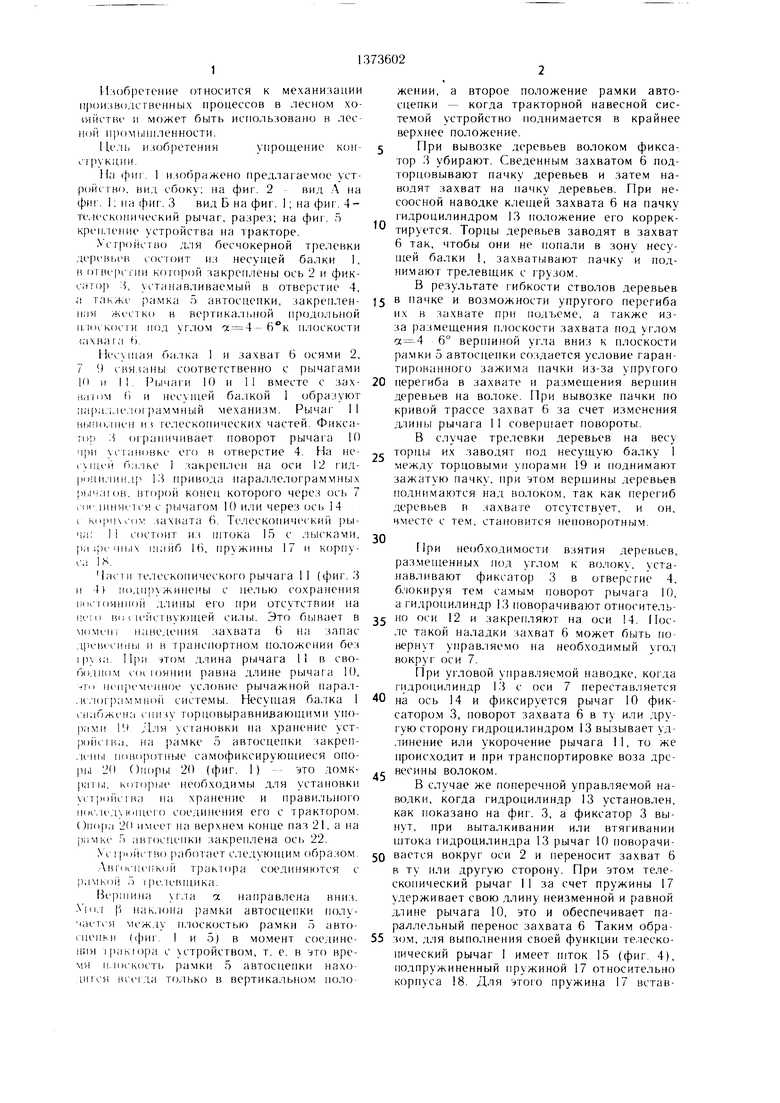
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для бесчокерной трелевки деревьев | 1984 |
|
SU1147614A1 |
| Транспортное средство для бесчокерной трелевки деревьев | 1981 |
|
SU981041A1 |
| Машина для бесчокерной трелевки деревьев | 1986 |
|
SU1342779A1 |
| УСТРОЙСТВО ДЛЯ БЕСЧОКЕРНОЙ ТРЕЛЕВКИ ЛЕСА | 2014 |
|
RU2579776C1 |
| Машина для бесчокерной трелевки леса | 1984 |
|
SU1229090A2 |
| Устройство для бесчокерной трелевки деревьев | 1977 |
|
SU604541A2 |
| ТРЕЛЕВОЧНО-ПОГРУЗОЧНАЯ МАШИНА | 2010 |
|
RU2440288C1 |
| Устройство для бесчокерной трелевки деревьев | 1987 |
|
SU1428624A1 |
| МАШИНА ДЛЯ ТРЕЛЕВКИ ДЕРЕВЬЕВ | 1967 |
|
SU195761A1 |
| Устройство для бесчокерной трелевки древесины | 1990 |
|
SU1798222A1 |
Изобретение отиоситсн к ycrpoiuiH.iM для бесчокерной 1)е. д)е и сины. Ui-, п. и.«)ор1 тснинуг1 Х)1цение конструкции. N npoHCTHo содержит несущую балку I, и чакр(Ч1,1 ЦИ г I Ч I НЯ 1, IH с Id и пичсским га )ыча| 1)в концом на рьн Hi,ii 1()М |0 (.цепки кал bfidi Л :Л 1 к леи; :.ie на иен торцовыравннвающии )амку 5 антосиеикн За.хват 6 necviuei i балкой двумя рыча- II. Рычаг II В1)1нолиен телеско- идроиилнндр ЬЗнрнвода поворо Ю и II :)акрен;|ен одним балке 1, а вторым, пкм разъемным, связан с и с захватом 6. Рамка 5 и захват 6 размеиюиы в ||род(), н.юскости иод кото- р ч а авто- вертн нанрав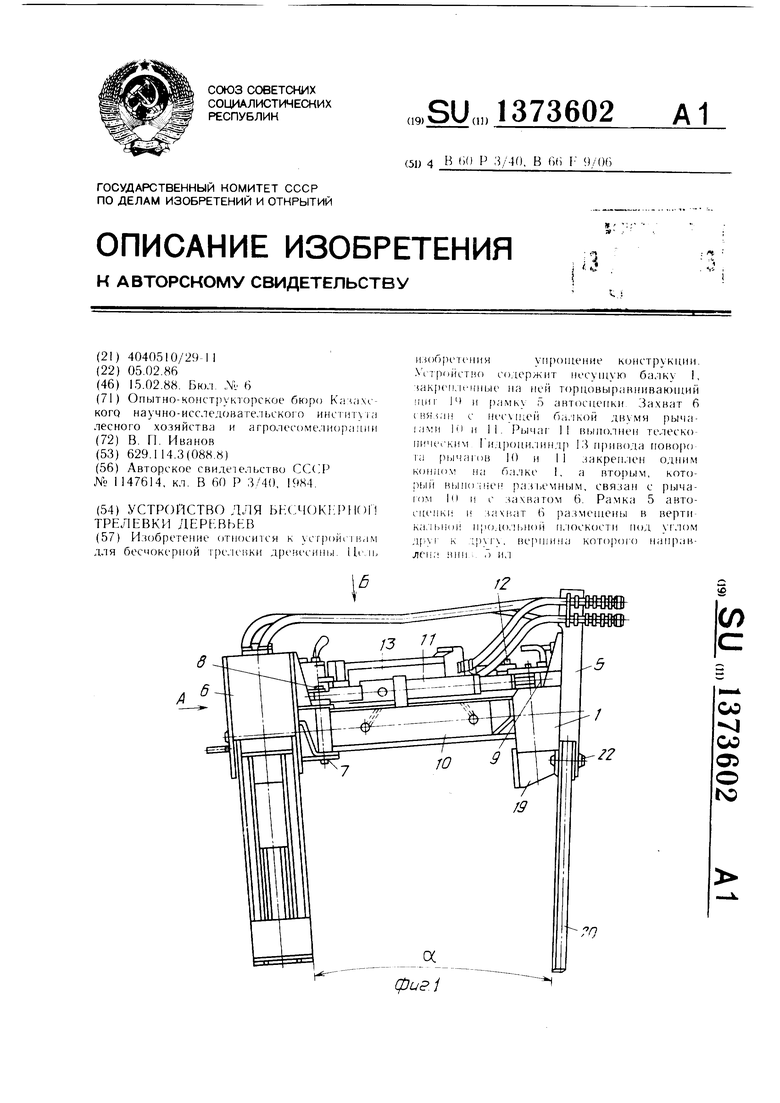
фиг.1
. 5
(л)ст;)вит(. ль Г. Торршкяна ,i И, Bi pecКорректор ЛА. Пожо
Тираж 569Подписное
ИИНИПИ 1 ocy. UipcTUfiiiioif) кимитета СССР iio ;и-лам изобретений и открытий
1 13035, Л оскна, Ж 35. Раучиекая наб., д. 4/5 11р(1и: водствеиио-11().1играфич1ч-к)е предприятие, г. Ужгород, ул. Проектная. 4
I l-.uiKTdp т. Парфенова liaKai 36t):i4
Вид 5
.5
18
,iff / /7 / /5y///Y ч.
у чЧЧЧЧЧЧЧ W
/ /
Фиг.
| Приспособление для пуска и останова ткацкого станка | 1935 |
|
SU47614A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
