СО
|С
i
Изобретение относится к автоматическому контролю и может быть исползовано в системах централизованного контроля и управления технологическ ми параметрами.
.Цель изобретения - повышение достоверности контроля и качества.стабилизации технологического параметра при сбоях в канале измерения сие темы.
Сущность изобретения заключается в следующем.
Знание предыстории поведения стабилизируемого технологического пара метра до текущего момента времени (нескольких предьщущих и текущего, результатов измерения-отсчетов параметра) позволяет прогнозировать результат каждого последующего его измерения, а априорная, например сттистическая, информация о допустимо поведении параметра и точности его аналого-цифрового преобразования при измерении позволяет определить допустимую ошибку такого прогноза. Эти данные при каждом последующем измерении параметра используются для селекции аномальных (нетипичных для параметра результатов измерения вызванных кратковременными сбоями в канале измерения под воздействием помех цехового оборудования. В обще случае продолжительность аномалий может достигать нескольких периодов измерения параметра, поэтому для ее селекции необходимо осуществлять одно- или многократный прогноз стабилизируемого параметра. Требуемая кратность прогноза определяется в к дом конкретном случае в зависимости от временных характеристик помех, однако зачастую достаточно двукратного обнаружения сбоя, а третий сбой подряд свидетельствует о неисправности в канале измерения.
Процедура селекции аномалий начинается с определения на один период измерения t прогнозируемого (ожидаемого) результата измерения, затем в момент измерения текзгащй результа измерения сравнивается с ожидаемым. Если их разность превышает допустимую ошибку прогноза, то результат текущего измерения считается аномалным (сбойным),а в качестве текущего .фактического отсчета контролируемог параметра принимается прогнозируемо значение. Затем определяется еле-
мани t|,t
дующее прогнозируемое значение параметров еще на период Р вперед (т.е. осуществляется двукратный прогноз) и так до тех пор, пока сбойная ситуация повторяется либо число сбоев превысит допустимое. В последнем случае формируется сигнал аварийного состояния системы автоматической стабилизации параметра.
Вьшрлнение прогноза позволяет также предсказывать выход стабилизируемого параметра за допустимые пределы уклонения и определять предаварийные ситуации.
Если стабилизируемый параметр на интервале времени (-т , t п ) с достаточной степенью точности описывается полиномом т-й степени, то для вьтолнения одно- и многократного прогноза можно получить простые для технической реализации вычислительные выражения в виде линейной комбинациИ| отсчетов параметра.
Пусть Рр , Р „.,,.. .Р „.„ - равноотстоящие во времени отсчеты стабилизируемого параметра P(t) в моменты вре л
, ,( соответстмани t|,t
венно, где tfl - текущий момент изме-. рения. Тогда стабилизируемый параметр можно представить в виде полинома Лагранжа с остаточным членом
m
- Г + Ti;
+
m
p(t) 1- HP n----i- + n pu; .„ ..n , ., + (
/II
,.-, - jio
1-0
ни t|,t
(t + j ) , (1)
мани t|,t
м,
где
M..,- максимальное значение
(т+1)-й производной от параметра -P(t) .
Подставляя в выражение (1) значение времени t С , t 2 ,..., ,. можно получить выражение для одно- и k-кратного прогноза и верхние оценки методической ошибки прогноза лМ.. Например, при и ,3 вычислительные вьражения имеют вид:
м,
Р( « ). +4Р„., -Рп.(2)М Р(2 ) 10Р„-20Р„., +15Р„,, .З;(З)
м,«1
м,
55
4Mj |м
м,
Р(3 )20Р„-45Р. +367 -10P.j;(4)
31374248/
iКроме методической ошибки прогно- нал линия), его прогнозируемого зна- 3 atf - на каждом i-м шаге возникает чения (штриховая линия) и аномаль- ошибка прогноза л. от трансформации ошибок аналого-цифрового преобразоного результата измерения (штрих- с пунк тирная линия) , на фиг, 4 - пример ревания (ошибка от квантования по уровню с дискретностью с отсчетов параметра Р„. , ) .
Верхняя оценка ошибки А, определяется погрешностью цифроаналогового преобразования + /2 и значениями коэффициентов в расчетных выражениях (2), (3) и (4), а именно m
где коэффициент перед j-м отсчетом параметра в выражении для расчета i-ro прогнозируемого значения параметра. Так, для приведенного вьш1е приме
т.
Ъ
49 ,,
Шс/в результате ошибка прогноза на каждом i-M шаге не превьш1ает верхней оценки
-7pi
М, + Лг.
И зависит от- априорно известных значений (т+1)-и производной М,,, пери- /ода измерения J и цены единицы квантования параметра по уровню . Поэтому допустимые значения ошибок прогноза могут быть вычислены заранее.
Выражения (3) и (4) для дву- и трехкратного прогнозов, а также выражения и для последующих прогнозов получаются из вьфажения (2) при последовательной подстановке в него вместо отсчета Р значения ранее вычисленного по (2) прогнозируемого значения параметра. Это свойство полученных выражений позволяет организовать определение прогнозируемых значений параметра в рекуррентной форме с использованием только выражения (2) при последовательной подстановке в него ранее вычисленного прогнозируемого значения, но с изменением значения допустимой ошибки прогноза.
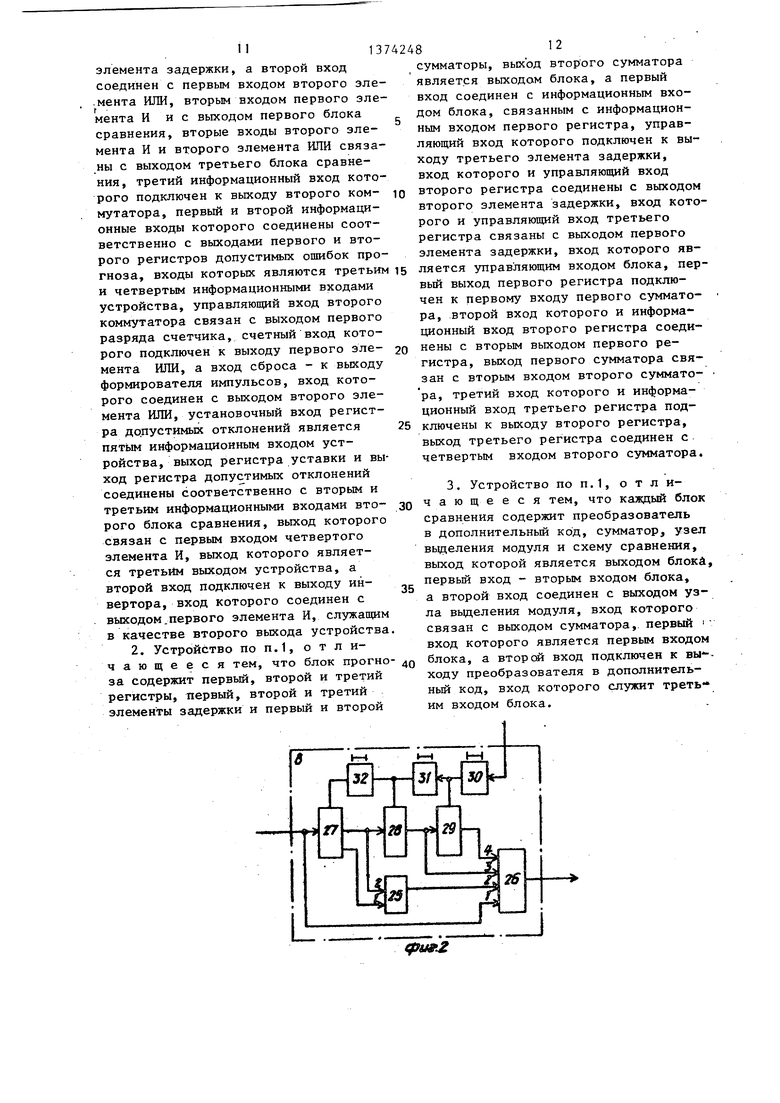
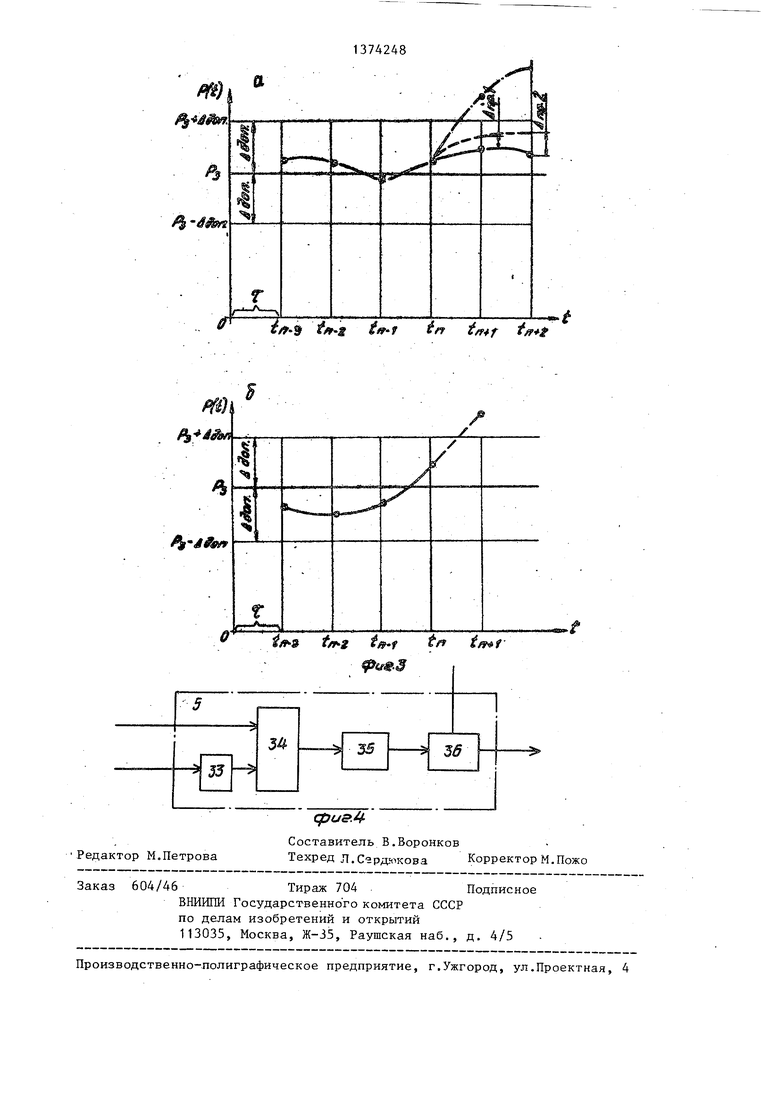
На фиг.1 показана структурная схема устройства; на фиг.2 - структурная схема блока прогноза; на фиг.З - изменение реального параметра (сплошнал линия), его прогнозируемого зна- чения (штриховая линия) и аномаль-
ного результата измерения (штрих- пунк тирная линия) , на фиг, 4 - пример реализации каждого из блоков сравнения . Устройство содержит аналого-циф- ровой преобразователь 1, первый коммутатор 2, регистр 3 установки, .ре0 гистр 4 допустимых отклонений, первый 5 и второй 6 блоки сравнения, регистр 7 текущего значения параметра, блок 8 прогноза, регистр 9 прогнозируемого значения параметра, пер5 вый 10 и второй 11 регистры допустимых ошибок прогноза, второй коммутатор 12, третий блок 13 сравнения, счетчик 14, первый 15, второй 16 и третий 17 элементы И, первый 18
0 и второй 19 элементы ИЛИ, формирователь 20 импульсов, инвертор 21, чет- вертьй элемент И-.22, первый 23 и второй 24 элементы задержки.
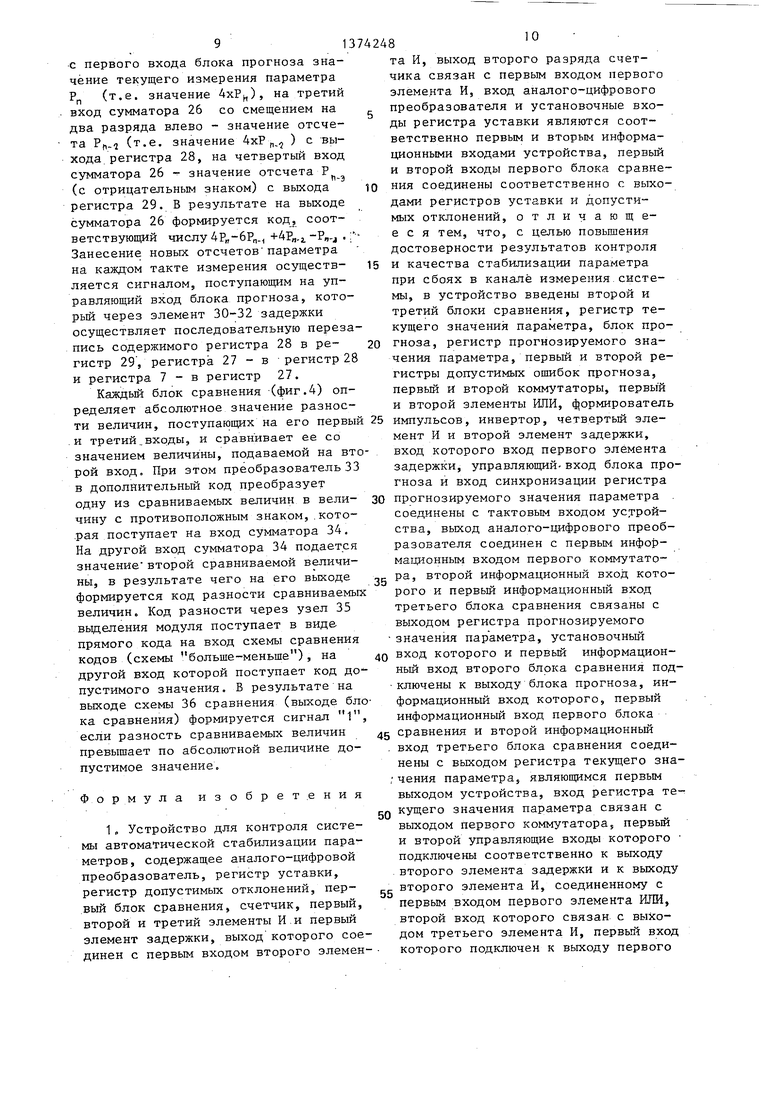
Блок 8 прогноза (фиг.2) содержит
5 первьй 25 и второй 26 сумматоры и последовательно соединенные первый 27, второй 28 и третий 29 регистры предыдущих отсчетов параметра и последовательно соединенные первый 30, вто0 рой 31 и третий 32 элементы задержки. Блоки сравнения состоят из преоб- разователя 33 в дополнительный, код, сумматора 34, узла 35 выделения модуля и схемы 36 сравнения (схемы Больше-меньше) .
Устройство работает следующим образом.
В исходном состоянии в регистры 4,10 и 11 заносятся и хранятся в процессе работы устройства соответствен но допустимое уклонение параметра от . установки л оп первая Л р, и вторая л „р допустимые ошибки прогноза, в регистры 3 и 7 и в регистры блока 8 прогноза - значение уставки стаби5
0
5
0
5
лизируемого параметра Pj, а счетчик 15 обнуляется. Текущее значение стабилизирующего параметра, поступающее на первый вход устройства, через преобразователь 1 в цифровом виде поступает на вход коммутатора 2.Каждое измерение сопровождается тактовым сигналом, поступающим на шестой вход устройства. Этот сигнал, поступив на вход синхронизации регистра 9, заносит в него.прогнозируемое значение стабилизируемого параметра, по ступающее с выхода блока 8 прогноза и сформированное на предьщущем так-
5 .
те измерения. Одновременно тактовый сигнал поступает на второй вход блока 8 и осуществляет перезапись в него предьщущего результата измерения из регистра 7. Через время, статочное для срабатывания регистра 9 и блока прогноза, на выходе элемента 24 задержки появляется сигнал, поступающий на вход коммутато- ра 2 и осуществляющий запись в регистр 7 текущего результата измерения параметра.
Первый блок 5 сравнения осуществляет сравнение абсолютного значения разности текущего значения параметра (содержимого регистра 7) и уставки (содержимого регистра 3) с допустимым отклонением лдоп(содержимым регистра 4). Если стабилизируемый па- раметр находится в пределах допуска, то на выходе блока 5 сравнения формируется сигнал О, который запирает элемент И 15, в результате чего на выходе инвертора 21 появ- ляется сигнал 1, разрешающий прохождение сигналов чер-ез элемент И 2 в случае наличия предаварийной ситуции. Предаварийная ситуация обнаруживается с помощью блока 6 сравнени признаком чего является выход прогнзируемого значения параметра на так измерения вперед за пределы поля допуска (фиг.36), т.е. когда разность между выходным кодом блока прогноза и уставкой (coдepжи a м регистра 3) превышает по абсолютной величине допустимое уклонение/),(,п (содержимое регистра 4). При этом на выходе блока 6 сравнения формируется сигнал 1, который через открытый элемент И 22 поступает на третий выход устройства, извещая о возникновении предаварийной ситуадаи.
Селекция аномальных результатов измерения выполняется при каждом измерении по тактовому сигналу, формируемому на выходе первого элемента 23 задержки. Первоначальное нулевое состояние счетчика 14 обеспечивает через коммутатор 12 подключение содержимого регистра 10 (пер- вой допустимой ошибки прогноза ipj, к первому входу блока 13 сравнения. На другие входы блока 13 сравнения поступают с выходов регистров 7 и 9 соответственно текущее .и прогнозируемое значения стабилизируемого параметра. Если абсолютное значение
0 5 Q
5
5
0
5
0
разности указанных значений парямет- ра превышает/1пр1 (фиг.За) , то это свидетельствует о сбойной ситуации в канапе измерения системы стабилизации. В этом случае на выходе блока 13 сравнения появляется сигнал 1, который разрешает прохождение тактового сигнала с выхода элемента 23 задержки через элемент И 16 и элемент ИЛИ 18 на вход счетчика 14, увеличивая его содержимое на единицу. Одновременно сигнал с выхода элемента И 16 поступает на вход коммутатора 2 и синхронизирует перезапись первого прогнозируемого значения параметра, поданного на вход коммутатора 2 с вьгхрда регистра 9, в регистр 7. Время задержки тактового сигнала, определяемое элементом 23 задержки, равно времени задержки элемента 24 задержки и времени срабатывания блока 8 прогноза. В результате на выход устройства с выхода регистра 7 в систему стабилизации поступает не аномальный результат измерения параметра, а прогнозируемое значение, что повышает качество стабилизации параметра.
Перед следующим после первого сбойного тактом измерения в блоке 8 прогноза формируется второе прогнозируемое значение параметра Р(2 С), которому соответствует второе допустимое значение ошибки прогноза А„р1 , хранящееся в регистре 11. Единичное состояние счетчика 14 обеспечивает подключение.через коммутатор 12 выхода регистра 11 к входу блока 13 сравнения. Если в следующем такте измерения разность-текущего и прогнозируемого значений вторично превьша- ет допустимую ошибку прогноза „р (фиг.За), то на выходе блока сравне- |ния сохраняется сигнал 1, который разрешает прохождение тактового сигнала с вькода элемента 23 задержки через элемент И 16 и элемент ИЛИ 18 на вход счетчика 14, в который заносится второй импульс.
Состояние 2 счетчика 14 разрешав, ет прохождение сигнала аварии через элемент И 15. Сигнал аварии формируется в том случае, если результат измерения после первого сбоя выходит за пределы поля допуска, о чем свидетельствует появление сигнала 1 на выходе первого блока 5 сравнения. Совпадение сигналов 1 на входе эле 1
мента И 15 вызывает появление сигнала аварии системы стабилизации на выходе устройства.
Если после однократного сбоя результат измерения стабилизируемого параметра отличается от прогнозируемого на величину, не превышающую допустимое значение ошибки прогноза, то сигнал 1 на выходе блока 13 сравнения снимается. Сигнал перепада из 1 в О с выхода блока 13 сравнения через элемент ИЛИ 19 поступает на вход формирователя 20 импульсов, вызывая появление на его выхо- да сигнала, переводящего счетчик 14 в нулевое состояние. Сигнал нулевого состояния счетчика 14 запирает элемент И 15, предотвращая формирование аварийного сигнала на выходе устрой- ства, которое подготавливается таким образом к обнаружению следующих ненормальных ситуаций.
Устройство обеспечивает селекцию
8
двух периодов измерения, который совместно с вькодным сигналом блока 5 сравнения вызывает формирование на выходе устройства (выходе элемента И 15) сигнала аварии системы стабилизации параметра.
Если в следующем такте измерения после первого обнаружения выхода за допустимые пределы стабилизируемый параметр возвращается в поле допуска, то сигнал 1 на выходе блока 5 сравнения снимается, а его перепад из состояния 1 в О через элемент ИЛИ 19 и формирователь 20 импульсов вызьгеает обнуление счетчика 14, переводя устройство в состояние готовности обнаружения дальнейших ненормальных ситуаций.
Описание работы устройства приведено для случая, когда допустимое время выхода параметра за пределы поля допуска равно двум периодам измерения, однако принципы построе
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сжатия информации | 1986 |
|
SU1324047A1 |
| Автоматизированная адаптивная система управления рудновосстановительной электропечи | 1989 |
|
SU1806448A3 |
| Устройство для контроля за системой автоматической стабилизации параметров | 1980 |
|
SU875393A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ | 2000 |
|
RU2160919C1 |
| Устройство для прогнозирования случайных функций | 1980 |
|
SU943741A1 |
| Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления | 1985 |
|
SU1686078A1 |
| Устройство для измерения механической скорости бурения | 1979 |
|
SU863843A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫБОРА РАБОЧИХ ЧАСТОТ | 2005 |
|
RU2295761C1 |
| Устройство для классификации дискретных случайных сигналов | 1983 |
|
SU1160435A1 |
| Автоматизированная система управления рудовосстановительной электропечи | 1986 |
|
SU1401242A1 |
Изобретение относится к автоматическому контролю и может быть использовано в системах контроля и управления технологическими параметрами. Цель изобретения - повышение достоверности контроля и качества стабилизации параметров при сбоях в каналах измерения. Устройство содержит аналого-цифровой преобразователь 1, два коммутатора 2 и 12,регистры уставки 3, допустимых отклонений 4, текущего значения параметра 7 и прогнозируемого значения параметра 9, два регистра 10 и 11 допустимых ошибок прогноза, три блока сравнения 5,6 и 13, блок 8 прогноза, счетчик 14, четыре элемента И 15-17 и 22, два элемента ИЛИ 18 и 19, формирователь 20 импульсов, инвертор 21 и два элемента 23 и 24 задержки. Устройство обнаруживает предаварий- ные ситуации и осуществляет селекцию аномальных результатов измерения за счет выполнения двухшагового прогноза динамики изменения прогноза. 2 3.п. ф-лы, 4 ил.
кратковременных выходов стабилизируе- 25 ния устройства остаются теми же
мого параметра за поле допуска, не обусловленных аномалиями в измерении, а определяемых ходом технологического процесса.
В этом случае прогнозируемые и те- зо нения допустимых ошибок прогноза
4рр; (,k), а емкость счетчика 1 увеличивается до k.
кущие значения параметра не отличаются друг от друга больше чем допустимая ошибка прогноза, поэтому сигналы на выходе блока 13 сравнения отсутствуют .
При первом выходе стабилизируемого параметра за пределы поля допуска на выходе блока 5 сравнения формируется сигнал 1, который поступает на вход элемента И 15, но в качестве признака аварийной ситуации на выход устройства не проходит, поскольку элемент И 15 заперт сигналом нулевого состояния счетчика 14. Сигнал 1 с выхода блока 5 сравнения разрешает прохождение тактового сигнала с вькода элемента 23 задержки через элемент И 17 и элемент ИЛИ 18 на вход счетчика 14, переводя его в единичное состояние. Если в следующем такте измерения значение стабилизируемого параметра остается за пределами поля допуска, то второй тактовый сигнал с выхода элемента 23 задержки, пройдя через элемент И 17 и элемент ИЛИ 18, переводит счетчик 14 в состояние 2. На выходе счетчика 14 появляется сигнал 1, свидетельствующий, что ненормальная ситуация длится более
и при увеличении допустимого времени ненормальной ситуации до k периодов измерения. При этом увеличивается только число регистров 11 для хра
4рр; (,k), а емкость счетчика 14 увеличивается до k.
Блок прогноза ориентирован на вычисление прогнозируемого значения параметра в соответствии с выражением (2). При этом на каждом такте прогноза на вход регистра 27 поступает текущее значение стабилизируемого параметра (с выхода регистра 7), а в регистрах 27, 28 и 29 хранятся пре- дьщущие отсчеты параметра Р.,., ,Р.
п-1
п-э
соответственно.
5
0
На вход сумматора 25 поступает с первого выхода регистра 27 со смещением на два разряда влево (в сторону старших разрядов) значение отсчета параметра P , что эквивалентно его умножению на 4. С второго выхода регистра 27 на другой бход сумматора 25 подается значение отсчета параметра Р,, со смещением влево на один разряд, что эквивалентно его умножению на 2. В результате на выходе сумматора 25 формируется код числа 6 X Р., , который (с от- рицательным знаком) подается на второй вход сумматора 26. Одновременно на первый вход сумматора 26 поступает со смещением влево на два разряда,
ti-э
10
с первого входа блока прогноза значение текущего измерения параметра Р (т.е. значение 4хР), на третий
вход сумматора 26 со смещением на два разряда влево - значение отсчета Р. (т.е. значение 4хР, ) с выхода регистра 28, на четвертый вход сумматора 26 - значение отсчета Р (с отрицательным знаком) с выхода регистра 29. В результате на выходе сумматора 26 формируется код, соответствующий числу 4Р„-6Р„., +4Pn.j.-P,.j . Занесение новых отсчетов параметра на кажд ом такте измерения осуществляется сигналом, поступающим на управляющий вход блока прогноза, который через элемент 30-32 задержки осуществляет последовательную перезапись содержимого регистра 28 в ре- 20 гистр 29, регистра 27 - в регистр 28 и регистра 7 - в регистр 27.
Каждьш блок сравнения (фиг.4) определяет абсолютное значение разнос15
ти величин, поступающих на его первый 25 импульсов, инвертор, четвертьш эле- . и третий вхрды, и сравнивает ее со мент И и второй элемент задержки, значением величины, подаваемой на вто- вход которого вход первого элемента рой вход. При этом преобразователь 33 задержки, управляющий-вход блока про- в дополнительньш код преобразует гноза и вход синхронизации регистра одну из сравниваемых величин в вели- ЗО прогнозируемого значения параметра .
чину с противоположным знаком,,которая поступает на вход сумматора 34. На другой вход сумматора 34 подается значение второй сравниваемой величины, в результате чего на его выходе формируется код разности сравниваемых величин. Код разности через узел 35 выделения модуля поступает в виде прямого кода на вход схемы сравнения кодов (схемы больше-меньше) , на другой вход которой поступает код до- пустимого значения. В результате на выходе схемы 36 сравнения (выходе блока сравнения) формируется сигнал 1, если разность сравниваемых величин превышает по абсолютной величине допустимое значение.
Формула изобретения
1„ Устройство для контроля системы автоматической стабилизации параметров, содержащее аналого-цифровой преобразователь, регистр уставки.
регистр допустимых отклонений, пер- второго элемента И, соединенному с
блок сравнения, счетчик, первый, второй и третий элементы И,и первый элемент задержки, выход которого соединен с первым входом второго элеменпервым входом первого элемента ИЛИ второй вход которого связан с выхо дом третьего элемента И, первьй вх которого подключен к выходу первог
0
та И, выход второго разряда счетчика связан с первым входом первого элемента И, вход аналого-цифрового преобразователя и установочные входы регистра уставки являются соответственно первым и вторым информационными входами устройства, первый и второй входы первого блока сравнения соединены соответственно с выходами регистров уставки и допустимых отклонений, отличающееся тем, что, с целью повышения достоверности результатов контроля 5 и качества стабилизации параметра при сбоях в канале измерения системы, в устройство введены второй и третий блоки сравнения, регистр текущего значения параметра, блок прогноза, регистр прогнозируемого значения параметра, первый и второй регистры допустимых ошибок прогноза, первый и второй коммутаторы, первы й и второй элементы ИЛИ, формирователь
соединены с тактовым входом устройства, выход аналого-цифрового преобразователя соединен с первым информационным входом первого коммутато g pa, второй информационный вход которого и первый информационный вход третьего блока сравнения связаны с выходом регистра прогнозируемого значения параметра, установочньй
40 вход которого и первый информационный вход второго блока сравнения под- ключены к выходу блока прогноза, информационный вход которого, первый информационный вход первого блока
45 сравнения и второй информационньм . вход третьего блока сравнения соединены с выходом регистра текущего зна- ;чения параметра, являющемся первым выходом устройства, вход регистра теCQ кущего значения параметра связан с выходом первого коммутатора, первый и второй управляющие входы которого подключень соответственно к выходу второго элемента задержки и к выходу
первым входом первого элемента ИЛИ, второй вход которого связан с выходом третьего элемента И, первьй вход которого подключен к выходу первого
11
элемента задержки, а второй вход соединен с первым входом второго эле- .мента ИЛИ, вторым входом первого элемента И НС выходом первого блока сравнения, вторые входы второго элемента И и второго элемента ИЛИ связаны с выходом третьего блока сравнения, третий информационный вход кото37
рого подключен к выходу второго коммутатора, первый и второй информационные входы которого соединены соответственно с выходами первого и второго регистров допустимых ошибок прогноза, входы которых являются третьим is ляется управляющим входом блока, пер- и четвертым информационными входами устройства, управляющий вход второго коммутатора связан с выходом первого разряда счетчика, счетный вход которого подключен к выходу первого эле- 20 мента ИЛИ, а вход сброса - к выходу формирователя импульсов, вход которого соединен с выходом второго элемента ИЛИ, установочный вход регистра допустимых отклонений является 25 пятым информационным входом устройства, выход регистра уставки и выход регистра допустимых отклонений соединены соответственно с вторым и третьим информационными входами второго блока сравнения, выход которого связан с первым входом четвертого элемента И, выход которого является третьим выходом устройства, а второй вход подключен к выходу инвертора, вход которого соединен с выходом.первого элемента И, служащим в качестве второго выхода устройства. 2. Устройство по П.1, о т л ивый выход первого регистра подключен к первому входу первого сумматора, второй вход которого и информационный вход второго регистра соединены с вторым выходом первого регистра, выход первого сумматора связан с вторым входом второго суммато- ра, третий вход которого и информационный вход третьего регистра подключены к выходу второго регистра, выход третьего регистра соединен с четвертым входом второго сумматора.
30
3, Устройство по П.1, о т л и- чающееся тем, что каждый блок сравнения содержит преобразователь в дополнительный код, сумматор, узел выделения модуля и схему сравнения, выход которой является выходом блока, первый вход - вторым входом блока, а второй вход соединен с выходом узла выделения модуля, вход которого связан с выходом сумматора, первый вход которого является первым входом 4Q блока, а второй вход подключен к ходу преобразователя в дополнительный код, вход которого служит треть им входом блока.
чающееся тем, что блок прогноза содержит первый, второй и третий регистры, первый, второй и третий элементы задержки и первый и второй
424812
сумматоры, выход второго сумматора является вьпсодом блока, а первый вход соединен с информационным входом блока, связанным с информационным входом первого регистра, управляющий вход которого подключен к выходу третьего элемента задержки, вход которого и управляющий вход 1Q второго регистра соединены с выходом второго элемента задержки, вход которого и управляющий вход третьего регистра связаны с выходом первого элемента задержки, вход которого является управляющим входом блока, пер-
вый выход первого регистра подключен к первому входу первого сумматора, второй вход которого и информационный вход второго регистра соединены с вторым выходом первого регистра, выход первого сумматора связан с вторым входом второго суммато- ра, третий вход которого и информационный вход третьего регистра подключены к выходу второго регистра, выход третьего регистра соединен с четвертым входом второго сумматора.
ляется управляющим входом блока, пер-
3, Устройство по П.1, о т л и- чающееся тем, что каждый блок сравнения содержит преобразователь в дополнительный код, сумматор, узел выделения модуля и схему сравнения, выход которой является выходом блока, первый вход - вторым входом блока, а второй вход соединен с выходом узла выделения модуля, вход которого связан с выходом сумматора, первый вход которого является первым входом блока, а второй вход подключен к ходу преобразователя в дополнительный код, вход которого служит треть им входом блока.
&
iff- t/r-z ffi-t ff
34
| Устройство для контроля системы автоматической стабилизации технологических параметров | 1976 |
|
SU614441A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для контроля за системой автоматической стабилизации параметров | 1980 |
|
SU875393A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
