Изобретение относится к автоматизации производственных процессов на открытых горных разработках, а именно к автоматизации рабочего процесса роторного экскаватора, работающего в условиях сложноструктурных забоев.
Цель изобретения - повышение производительности работы и срока службы роторного экскаватора.
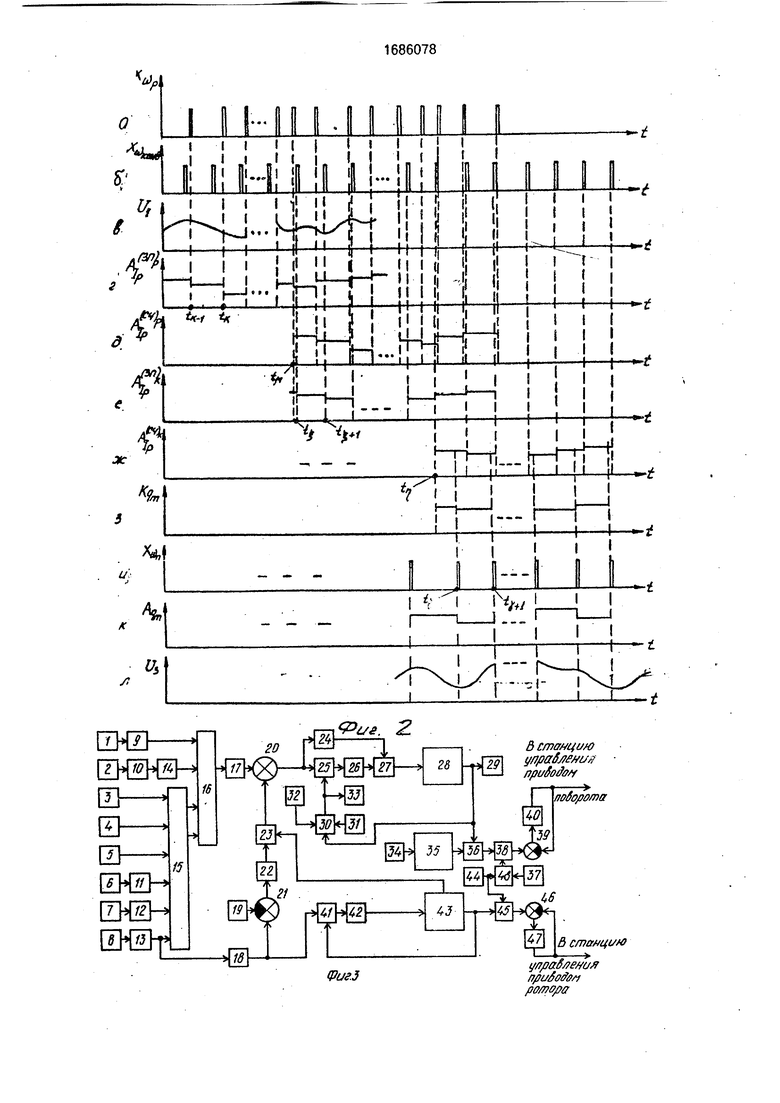
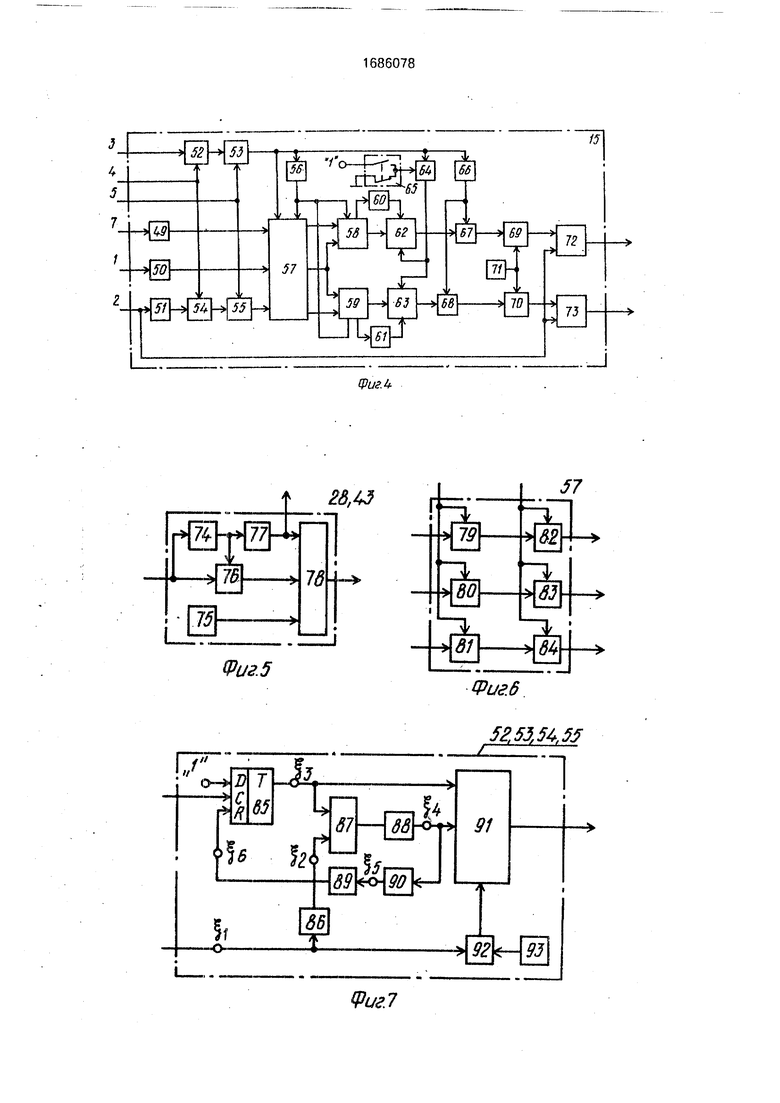
На фиг. 1 показана схема отработки сложноструктурного забоя роторным экскаватором; на фиг. 2 - эпюры, иллюстрирующие принцип формирования пространственных распределений коэффициентов прогноза; на фиг. 3 - структурная схема автоматизированной системы управления рабочим процессом роторного экскаватора; на фиг. 4 - структурная схема формирователя сигнала прогноза; на фиг. 5
-структурная схема корректирующего блока формирователя сигнала прогноза; на фиг. 6 - функциональная схема интегратора формирователя сигнала прогноза; на фиг. 7
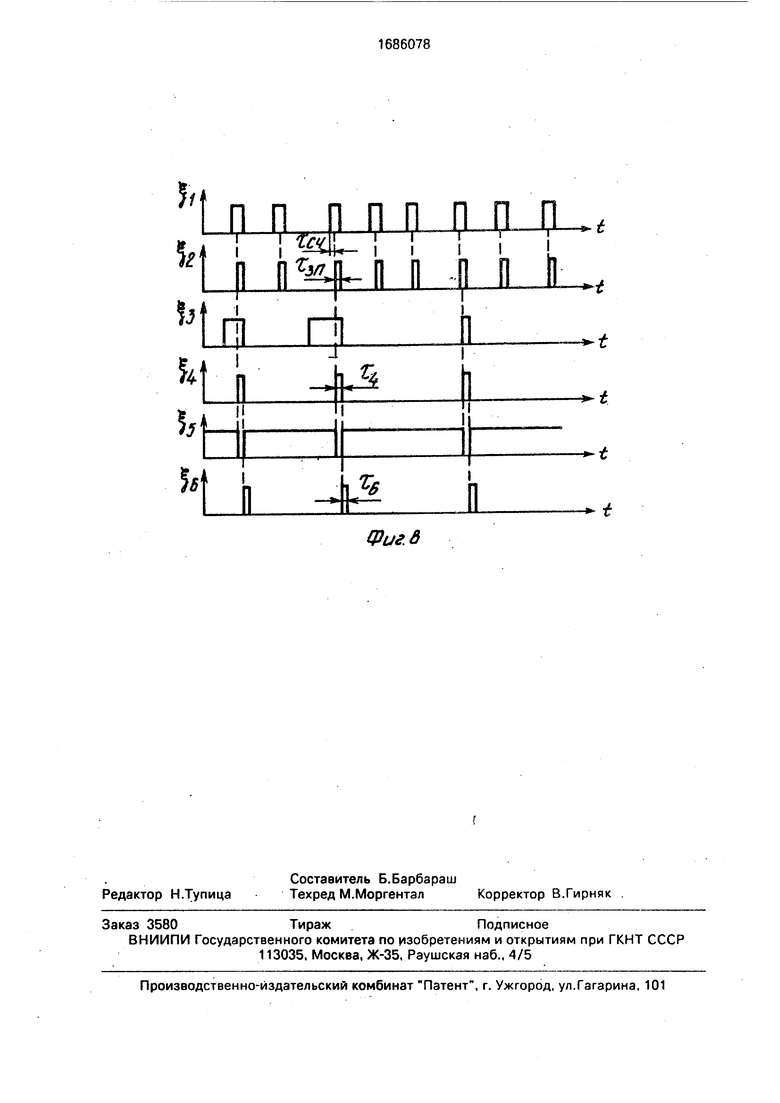
-структурная схема блока задержки формирователя сигнала прогноза; на фиг. 8 - эпюры, поясняющие работу блока задержки формирователя сигнала прогноза.
Для отражения сущности способа в качестве параметров, характеризующих интенсивность нагружения экскаватора, выбирают, например, текущие значения нагрузок приводов ротора и поворота, текущие значения производительности по массе, объемной производительности и уровня вибраций металлоконструкций экскаватора. Значения выбранных параметров представляют в масштабах, выбранных по критерию равноинтенсивного воздействия на оборудование, агрегаты и металлоконструкции экскаватора, в соответствии с выражением
KiUip(H)(t)K2U.),(H)K3uUH)
K4UqJH)K5UBA,
(1) 45
40
где Ki, «2, Кз. Кз и Kg - масштабные коэффициенты;
. UI(H), Uin(H) ), Uqv(H). ивд - сигналы на выходах измерителей текущих значений нагрузки привода ротора, нагрузки привода поворота, производительности по массе, объемной производительности и уровня вибраций металлоконструкций, соответствующие номинальным значениям измеряемых параметров.
Обозначим через Kilk,(t) Ui(t), toUdt) - U2(t), КзУцДг) Ua(t), K4Uq,(t) U4(t), K5Ue(t) - Us(t) (масштабы выбраны так, что при работе всегда Ui(t) U2(t) и L)2(t) Ui(t) возможно только при непредусмотренном режиме поворота) сигналы, соответствующие текущим значениям нагрузки привода ротора, нагрузки привода поворота, производительности по массе, объемной производительности и уровне вибраций металлоконструкций экскаватора.
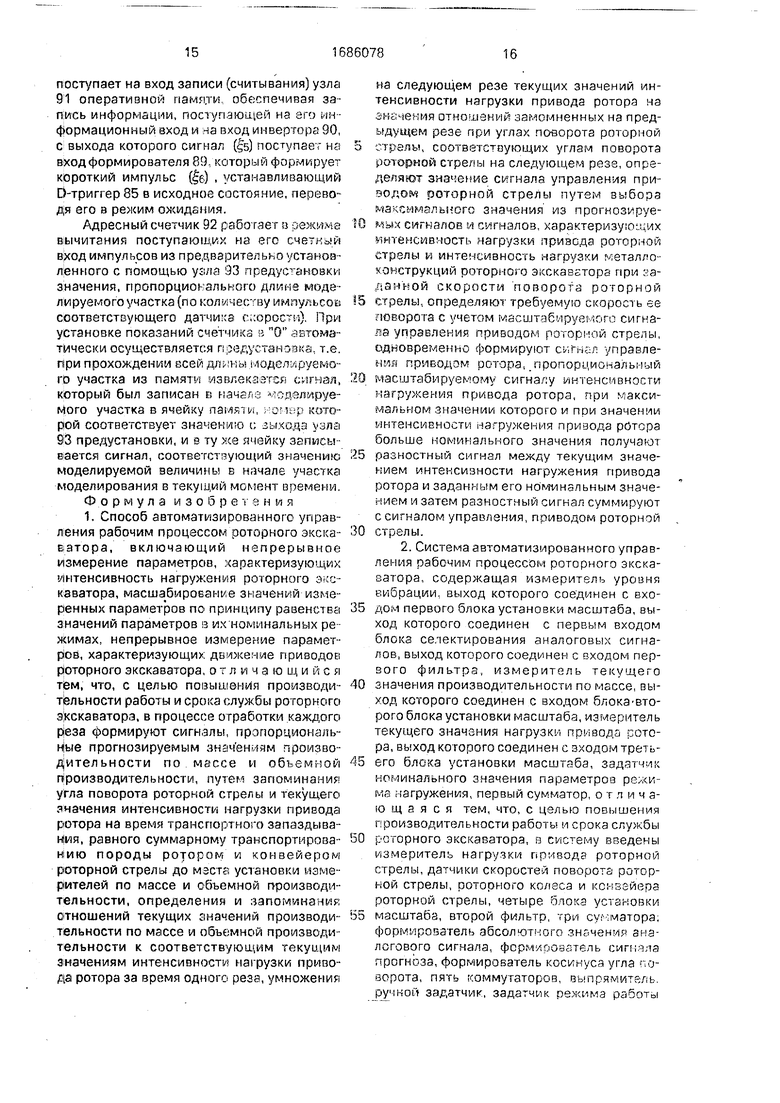
На резе, предшествующем отрабатываемому, формируют пространственные распределения по углу поворота верхнего строения экскаватора сигналов, пропорциональных отношениям текущих значений производительности по мяссе и объемной производительности к значению нагрузки
привода ротора, сдвинутому по модели дуги окружности ротора за время, равное времени транспортирования ископаемого от забоя к месту выгрузки из ковшей роторного колеса на конвейер роторной стрелы, определяемому скоростью вращения ротора, и по модели участка конвейера роторной стрелы за время, равное времени транспортирования ископаемого по конвейеру роторной стрелы к участку измерения
производительности по массе и объемной производительности, определяемому скоростью движения конвейера роторной стрелы (фиг, 1),
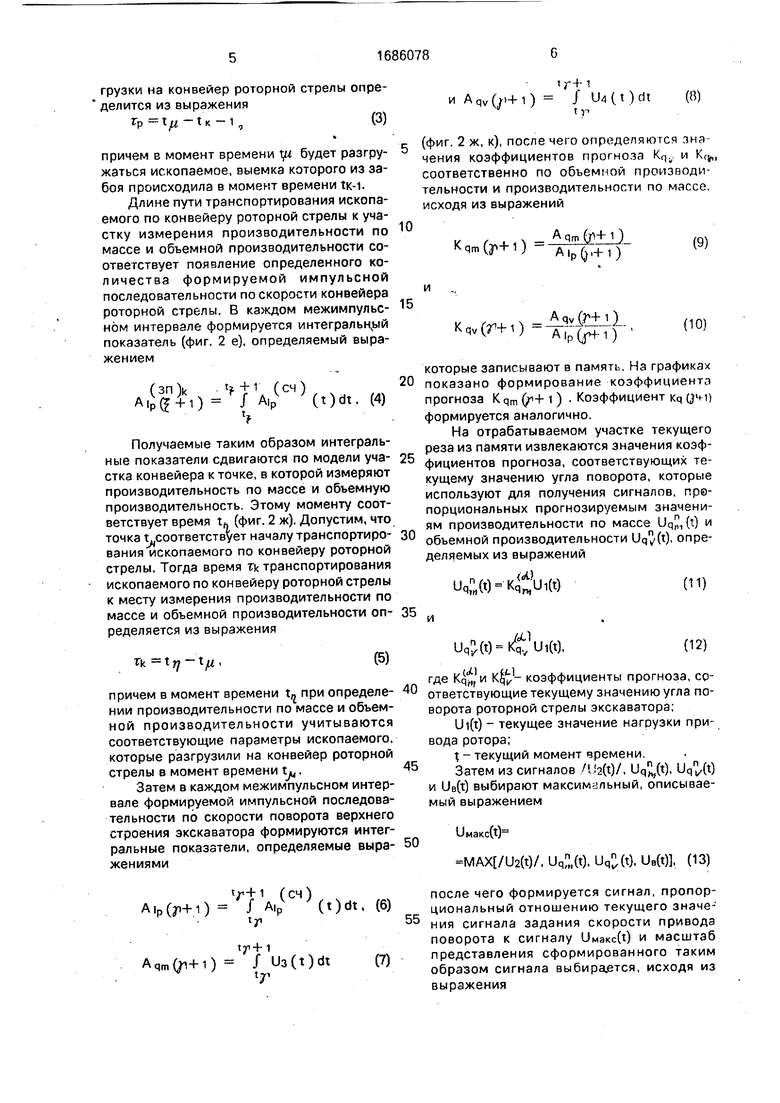
Принцип формирования распределений наглядно иллюстрируется графиками на фиг. 2. На графиках а, б и и показаны сформированные импульсные последовательности, периоды следования импульсов которых отражают соответственно скорости
ротора, конвейера роторной стрелы и поворота верхнего строения экскаватора.
Длине пути транспортирования ископаемого по дуге окружности ротора соответствует появление определенного
количества импульсов формируемой импульсной последовательности по скорости ротора, В каждом межимпульсном интервале формируется интегральный показатель (фиг. 2 г), определяемый выражением
A,J3n)P /Ui(t)dt.
IK -1
(2)
Получаемые таким образом интегральные показатели сдвигаются по модели дуги окружности ротора к точке, соответствующей месту выгрузки ископаемого на конвейер роторной стрелы. Этому моменту
соответствует время t (фиг. 2 д). Допустим, что точка tK-1 соответствует началу транспортирования ископаемого в ковшах ротора. Тогда время гр транспортирования ископаемого в ковшах ротора к месту выгрузки на конвейер роторной стрелы определится из выражения
Р t// - t к - 1 ,(3)
причем в момент времени yi будет разгружаться ископаемое, выемка которого из забоя происходила в момент времени тк-1
Длине пути транспортирования ископаемого по конвейеру роторной стрелы к участку измерения производительности по массе и объемной производительности соответствует появление определенного количества формируемой импульсной последовательности по скорости конвейера роторной стрелы. В каждом межимпульсном интервале формируется интегральный показатель (фиг. 2 е), определяемый выражением
t r + , и Aqv()+ i ) J U/j (t )dt
()
t г
(фиг. 2 ж, к), после определяются тна чения коэффициентов прогноза Kq и К,, соответственно по объемной производи тельности и производительности по массе исходя из выражений
10
Kqmfr+i) - )(9)
qv
Гуч.п Ач-(н-0
(Г+ AinUHO
(Ю)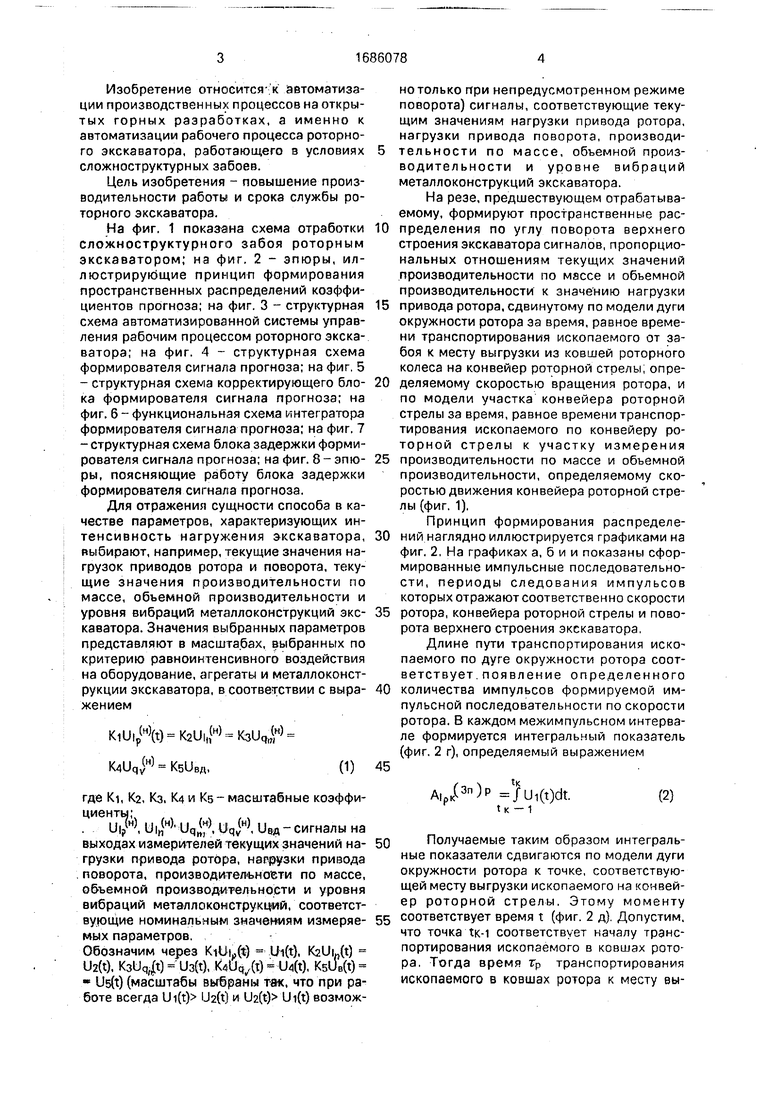
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная система управления рабочим процессом роторного экскаватора | 1985 |
|
SU1703797A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU899763A1 |
| Устройство для автоматического управления роторным экскаватором | 1981 |
|
SU988987A1 |
| Система автоматизированного управления роторным экскаватором | 1983 |
|
SU1164374A1 |
| Устройство для автоматического управления роторным экскаватором | 1987 |
|
SU1434039A1 |
| Устройство для контроля и учета работы добычного роторного экскаватора | 1983 |
|
SU1145089A1 |
| Система автоматизированного управления роторным экскаватором | 1985 |
|
SU1266942A2 |
| Устройство программного управления роторным экскаватором | 1979 |
|
SU870596A1 |
| Устройство диагностики состояния рабочего органа роторного экскаватора | 1987 |
|
SU1479574A1 |
| Устройство для автоматического управления поворотом роторной стрелы экскаватора | 1980 |
|
SU899761A1 |
Изобретение относится к автоматизации производственных процессов на открытых горных разработках. Цель - повышение произв-сти в работе и срока службы роторного экскаватора. Способ основан на непрерывном измерении параметров, характеризующих движение приводов экскаватора и интенсивность их нагрузки (ИН). Значения масштабируют по принципу равенства значений параметров в их номинальных режимах. В процессе отработки каждого реза формируют сигналы, пропорциональные -прогнозируемым значениям произв-сти (П) по массе и объемной П. Для чего запоминают угол поворота роторной стрелы (PC) и текущее значение ИН привода ротора на время транспортного запаздывания, равного суммарному транспортированию породы ротором и конвейером PC до места установки измерителей П по массе и объемной П. Определяют и запоминают отношения текущих значений П по массе и объемной П к соответствующим текущим значениям ИН привода ротора за время одного реза. На следующем резе умножают текущие значения ИН привода ротора на значения отношений, запомненных на предыдущем резе при углах поворота PC , соответствующих углам поворота PC наследующем резе. Затем определяют значение сигнала управления приводом PC путем выбора максимального значения из прогнозируемых сигналов и сигналов, характеризующих ИН привода PC и ИН металлоконструкций экскаватора при заданной скорости поворота PC Определяют требуемую скорость поворота PC с учетом масштабируемого сигнала управления приводом PC. Одновременно формируют сигнал управления приводом ротора-, пропорциональный масштабируемому сигналу ИН привода ротора. При его максимальном значении и при значении ИН привода ротора больше номинального значения получают разностный сигнал между текущим значением ИН привода ротора и заданным его номинл„ным значением. Суммируют разностный сигнал с сигналом управления приводом PC. Способ осуществляется автоматизированной системой управления, реализованной на элементах вычислительной техники и автоматики. 2 с. и 2 з.п.ф-лы, 8 ил. сл с ON 00 О О VI 00
( зп )k + 1 ( сч )
А р(+0 / А Р (t)dt.
Получаемые таким образом интегральные показатели сдвигаются по модели участка конвейера к точке, в которой измеряют производительность по массе и объемную производительность. Этому моменту соответствует время t,. (фиг. 2 ж). Допустим, что точка соответствует началу транспортирования ископаемого по конвейеру роторной стрелы. Тогда время гк транспортирования ископаемого по конвейеру роторной стрелы к месту измерения производительности по массе и объемной производительности определяется из выражения
причем в момент времени т.„ при определении производительности по массе и объемной производительности учитываются соответствующие параметры ископаемого которые разгрузили на конвейер роторной стрелы в момент времени т,,.
Затем в каждом межимпульсном интервале формируемой импульсной последовательности по скорости поворота верхнего строения экскаватора формируются интегральные показатели, определяемые выражениями
1Г+1 (сч) А рО+1) / А|р (t)dt, (6)
Г
tjf+i
AqmO-vM) / U3(t)dt 17
(7)
25
30
20
которые записывают в памятч На графиках показано формирование коэффициента
ПрОГНОЗа Kqm(p+l) . Коэффициент Kq У 1)
формируется аналогично
На отрабатываемом участке текущего реза из памяти извлекаются значения коэффициентов прогноза, соответствующих текущему значению угла поворота, которые используют для получения сигналов, пре- порциональных прогнозируемым значениям производительности по массе Uq() и объемной производительности Uq(t) определяемых из выражений
Uq,1,(t)
01)
35
Uq(t)KtW),
(12)
40
45
50
55
где Kqm и Kqy- коэффициенты прогноза, соответствующие текущему значению угла поворота роторной стрелы экскаватора.
Ui(t) - текущее значение нагрузки при вода ротора;
- текущий момент чремени
Затем из сигналов i(t)/. Uq(t). Uq(t) и UB(t) выбирают максим пьный, описываемый выражением
UMaKc(t)
(t)/, LOt). Uq, Ue(t), (13)
после чего формируется сигнал, пропорциональный отношению текущего значения сигнала задания скорости привода поворота к сигналу имакс(х) и масштаб представления сформированного таким образом сигнала выбирается, исходя из выражения
Uan(t) UH
Kn U3n ( t ) ,
где U3n(t) - текущее значение сигнала задания скорости привода роторной стрелы;
UH - номинальное значение параметров режимов нагружения;
Кп - масштабный коэффициент.
Требуемый сигнал задания скорости привода роторной стрелы на отрабатываемом участке реза определяется из выражения
Usn (t )
U
тп
Кп.
Затем формируется скорректированный по
косинусу угла поворота требуемый сигнал Озптр (t) задания скорости привода ротор-
ной стрелы для компенсации серповидно сти реза в соответствии с выражением
треб,
W
треб Uan (t)
cosct
Одновременно с формированием сигнала U3nTpe6(t) формируется требуемый сигнал задания скорости привода ротора, определяемый как произведение текущих значений сигнала нагрузки привода ротора и текущего сигнала задания скорости привода ротора, а масштаб представления сформированного таким образом сигнала выбирается, исходя из выражения
U3p(t)-UH-KP U3p(t).
где U3p(t) - текущее значение сигнала задания скорости привода ротора;
Кр - масштабный коэффициент.
Требуемый сигнал U3pTpe6(t) задания скорости привода ротора на отрабатываемом участке реза определяется из выражения
U3pTpe6(t) U3p(t)-Ui(t)-Kp.
Учитывая, что сигналы задания скоростей приводов ротора и роторной стрелы должны измениться со скоростями не выше допустимых для каждого из названных приводов ввиду их инерционности, сигналы U3nTpe6(t) и U3pTpe6(t) преобразуются в соответствии с выражениями
треб,
W
1
1 +Tip
треб
изр (t)
(14)
10
20
U
эр
тре6(г)
1
1 +Т2р требм
треб изр (t).
(20)
где (t) и U3pTpeo(t) - итоговые сигналы задания скоростей ротора и роторной стрелы;
Ti и Т2 - постоянные времени соответственно приводов роторной .стрелы и ротора (например, для роторных экскаваторов типа ЭРШРД-5000 производительностью 5000 м3/ч Ti 5 с и Т2 Т с);
р - оператор Лапласа.
15 В случае, когда при наибольшей скорости ротора сормакс сигнал нагрузки его привода UI(T) превышает номинальное значение UH параметров режима нагружения экскаватора, т.е. Ui(t) UH, разностный сигнал между текущим значением сигнала нагрузки привода ротора Ui(t) и номинальным значением параметров режима нагружения экскаватора UH
(16)
25
Us M-Ui(tHJH
(21)
30
суммируют с максимальным сигналом имакс(т), обеспечивая тем самым снижение скорости поворота до тех пор, пока сигнал не станет равным UH.
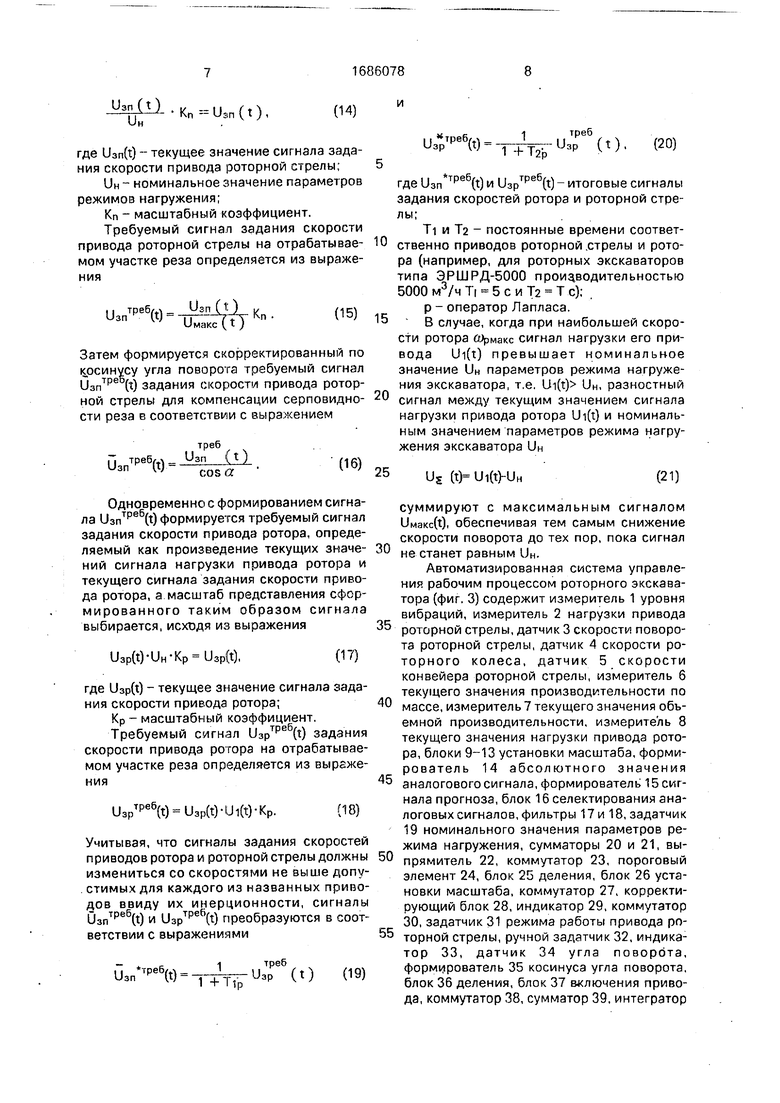
Автоматизированная система управления рабочим процессом роторного экскаватора (фиг. 3) содержит измеритель 1 уровня вибраций, измеритель 2 нагрузки привода
35 роторной стрелы, датчик 3 скорости поворота роторной стрелы, датчик 4 скорости роторного колеса, датчик 5 скорости конвейера роторной стрелы, измеритель 6 текущего значения производительности по
массе, измеритель 7 текущего значения объемной производительности, измеритель 8 текущего значения нагрузки привода ротора, блоки 9-13 установки масштаба, формирователь 14 абсолютного значения
45 аналогового сигнала, формирователь 15 сигнала прогноза, блок 16селектирования аналоговых сигналов, фильтры 17 и 18, задатчик 19 номинального значения параметров режима нагружения, сумматоры 20 и 21, вы50 прямитель 22, коммутатор 23, пороговый элемент 24, блок 25 деления, блок 26 установки масштаба, коммутатор 27, корректирующий блок 28, индикатор 29, коммутатор 30, задатчик 31 режима работы привода ро55 торной стрелы,ручной задатчик 32, индикатор 33, датчик 34 угла поворота, формирователь 35 косинуса угла поворота, блок 36 деления, блок 37 включения привода, коммутатор 38, сумматор 39, интегратор
40, блок 41 умножения, блок 42 установки масштаба, корректирующий блок 43, блок 44 включения привода, коммутатор 45 сумматор 46, интегратор 47 и элемент И 48. Выход интегратора 47 является выходом задания скорости привода ротора
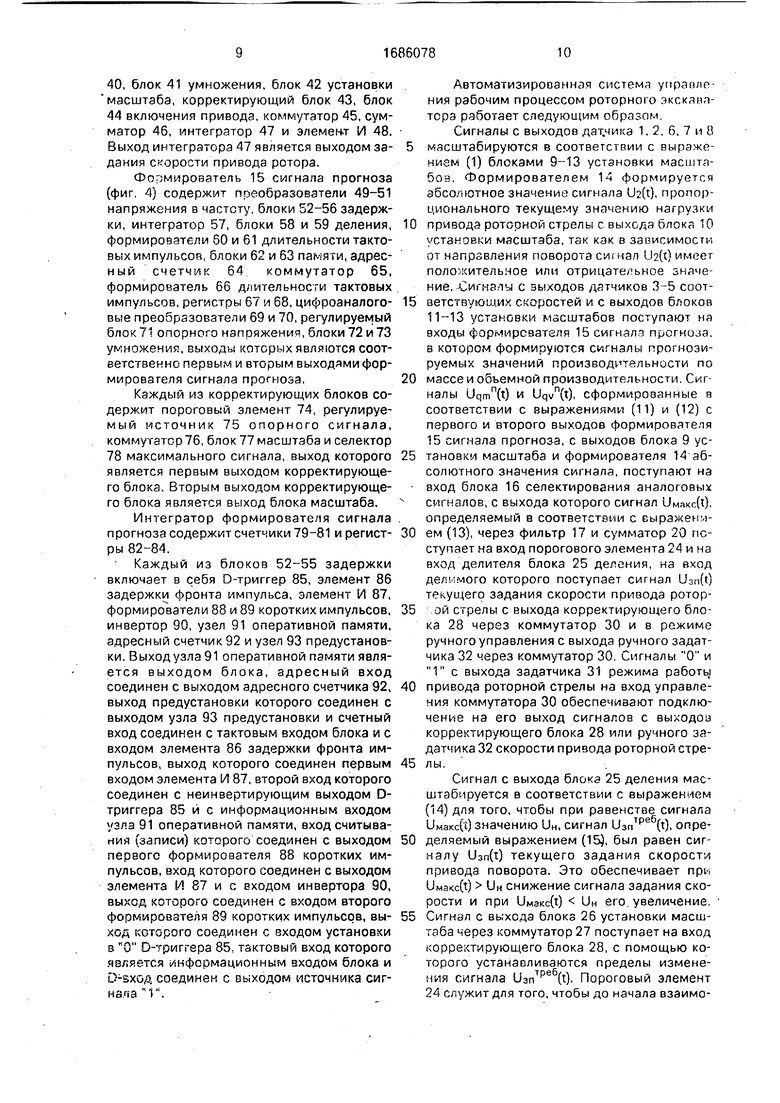
Фтмировятель 15 сигна ы прогноза (фиг А) содержит роеобразор.чтели 49-51 напряжения в чагтсту блоки ri l -56 задержки, интегратоо 57, блоки 58 и Ь9 деления, формирователи 50 и 61 длительности тактовых импульсог, блоки 62 и 63 nai Я|И адррс- ный счетчик 64 коммутатор 65, формирователь 66 длительное и тактовых импульсов, регистры 67 и 68. циороаналого- оые преобразователи 69 и 70, регулируемый блок 71 опорного напряженно, Ппоки 72 и 73 умножения, выходы котор и яьляются соответственно первым и вторым вь-ходями формирователя сигнала прогноза.
Каждый из корректирующих блоков содержит пороговый элемент 74 регулируемый источник 75 опорного сигнала, коммутатор 76, бпок 77 масштаба и селектор 78 максимального сигнала, выход которого является первым выходом корректирующе го блока. Вторым выходом корректирующего блока является выход блока масштаб.
Интегратор формировать я сигнала прогноза содержит счетчики 79-81 и регистры 82-84,
Каждый из блоков 52-55 задержки включает в себя D-триггер 85, элемент 86 задержки фронта импульса, элемент И 87, формирователи 88 и 89 коротких импульсов инвертор 90, узел 91 оперативной памяти, адресный счетчик 92 и узел 93 предустанов ки. Выход узла 91 оперативной памяти является выходом блока, адресный вход соединен с выходом адресного счетчика 92, выход предустановки которого соединен с выходом узла 93 предустановки и счетный вход соединен с тактовым входом блока и с входом элемента 86 задержки фронта импульсов, выход которого соединен первым входом элемента И 87. второй вход которого соединен с неинвертирующим выходом D- триггера 85 и с информационным «ходом узла 91 оперативной памяти, вход считывания (записи) которого соединен с выходом первого формирователя 88 коротких импульсов, вход которого соединен с выходом элемента И 87 и с входом инвертора 90, выход которого соединен с входом второго формирователя 89 коротких импульсов, вы ход которого соединен с входом установки в О D-триггера 85. тактовый вход которою является нфоомациониым входом блока и D-зход соединен с выходом источника сигнала V.
Автомагизироозннлч система упрлнле ния рабочим процессом роторною якскдпл тора работает следующим образом
Сигналы с выходов дат.чика 1.2 6. 7 и В масштабируются в соответствии с ниом (1) блоками 9 13 установки масштл бон. Формироватепем 14 формируется абсолютное значени сигнала Ui-(t), пропор ционального текущему значению нагрузки
0 привода ротоонои стрелы г выхода олокг, 10 установки масштаба, как в зависимости от направления поворота си, пап ()ft) имеет положительное или отрицательное зилче ние. Сигнгпм с эыкодов датчиков 3 5 соот
5 ветствующих скоростей и с выходов блоков 11-13 установки масштабов поступлю1 на входы формирочатч/ я 1Ь сигнал т пра.гниал в котором формиг ютгя cm налы прогнозируемых значений производи льнисти по
U массе и объемной производительности Cm налы Uqmn(t) и Uqvn(t) сформированные и соответствии с выражениями (11) и (12) с первого и второго формирователя 15 сигнала прогноза, с выходов блока 9 vc
Ь тановки масштаба и формирователя 14 абсолютного значения сигнала, поступают на вход блока 16 селектирования аналоговых сигналов, с выхода которого сигнал UM;iK(t) определяемый в соответствии с выра.р л
0 ем (13), через фильтр 17 и сумматор 20 иг, ступает на вход порогового элемента 24 и -м вход делителя блока 25 деления, на вход делгмого которого поступает сигнал LL,i(t) текущего задания скорости поииодэ ротор
5 ой стрелы с выхода корректирующего бло ка 28 через коммутатор 30 и в режима ручного управления с выхода ручното задат чика 32 через коммутатор 30 Сигналы О и 1 с выхода задатчика 31 режима работы
0 привода роторной стрелы на вход управления коммутатора 30 обеспечивают подключение на его выход сигналов с вы„одоз корректирующего блока 28 или ручного я- датчика 32 скорости причода роторной стре5 лы
Сигнал с выхода бли«-- 25 деления масштабируется в соответствии с выражением (14) для того, чтобы при равенстве сигнала UMaKc(t) значению UH, сигнал U3nTpefl(t), опре0 деляемый выражением (15), был равен сиг налу U3n(t) текущего задания скорости привода поворота, Это обеспечивает npi UMaxc(t) UH снижение сигнала задания скорости и при 11макс(т.) DH его увеличение
5 Сигнал с выхода блокз 26 установки масш таба через коммутатор 27 поступает на вход корректирующего блока 28, с помощью которого устанавливаются пределы изменения сигнала изптре (t). Пороговый элемент 24 служит для того, чтобы до начала взаимодействия ротора с забоем сигнал с выхода блока 26 установки масштаба не поступал на вход корректирующего блока 28, так как сигнал U3nTpe6(t) задания скорости до этого момента будет максимальным из-за очень малой величины UwaxcW ввиду работы экскаватора без нагрузки.
Как только величина UMaicc(t) становится равной или больше заданному пороговому значению, разрешающий сигнал с выхода порогового элемента замыкает цепь коммутатора 27, обеспечивая прохождение сигнала с выхода блока 26 установки масштаба на вход корректирующего блока 28. Выход блока 28, связанный с выходом блока 77 масштаба, не используется. В режиме ручного управления значения сигналов Uan(t) и U3nTpe6(t) индицируются соответственно на индикаторах 33 и 29. Задачей машиниста является установление показаний индикатора 33 равными показаниям индикатора 29, т.е. установление рекомендуемой скорости поворота. Сигнал 11зптре (t) поступает на вход делимого блока 36 деления, на вход делителя которого поступает сигнал с выхода формирователя 35 косинуса угла поворота, входным сигналом которого является сигнал с выхода датчика 34 угла поворота. На выходе блока 36 деления получают сигнал, определяемый выражением (16), который через коммутатор 38 поступает на вход замкнутой цепочки автоматического регулирования, состоящей из сумматора 39 и интегратора 40, на выходе которого формируется сигнал, определяемый выражением (19) и являющийся итоговым сигналом задания скорости привода роторной стрелы.
Сигнал задания на привод ротора формируется следующим образом. Сигнал с выхода блока 13 установки масштаба через фильтр 18 поступает на второй вход блока
41умножения, на второй вход которого поступает сигнал с выхода корректирующего блока 43, который масштабируется блоком
42установки масштаба в соответствии с выражением (17) для того, чтобы при равенстве сигнала Uap(t) значению UH сигнал 1)зртре (t), определяемый выражением (18), был равен сигналу Uap(t). Это обеспечивает при Ui(t) UH увеличение сигнала задания скорости ротора и при Ui(t) UH его снижение. Сигнал 1)зртреб(х) через коммутатор 45 поступает на вход замкнутой цепочки автоматического регулирования, состоящей из сумматора 46 и интегратора 47, на выходе которого формируется сигнал, определяемый выражением (20) и являющийся итоговым сигналом задания скорости привода ротора. Если при максимальном значении
скорости Wwaicc ротора сигнал Lh(t) станет больше сигнала UH, поступающего с выхода задатчика 19 номинального значения параметров нагружения на инвертирующий вход
сумматора 21, на неинвертирующий вход которого поступает сигнал с выхода сумматора 21, определяемый выражением (21), через выпрямитель 22 и коммутатор 23 поступает на второй неинвертирующий
вход сумматора 20, так как в этом время с второго выхода корректирующего блока 43 поступает сигнал 1 на вход управления коммутатора 23. В сумматоре 20 сигнал Uj (t), определяемый выражением (21), складывается с сигналом имакс(х), чем достигается снижение скорости поворота до значения, пока сигнал Ui(t) не станет равным сигналу ин.
Блоки 37 и 44 используются для включения соответственно приводов роторной стрелы и ротора путем выдачи сигналов 1 на входы управления коммутаторов 38 и 45. Исключение включения привода роторной стрелы при выключенном приводе ротора
достигается введением элемента И 48. так как, пока не будет включен привод ротора, сигнал 1 с выхода блока 37 включения привода поворота не поступит через элемент И 48 на вход коммутатора 38.
Формирователь 15 сигнала прогноза работает следующим образом (фиг. 4). Сигналы, поступающие на его входы, преобразуются в преобразователях 49-51 в частотно-импульсные сигналы. Сигнал с выхода преобразователя 51, пропорциональный нагрузке привода ротора, и частотно-импульсный сигнал, пропорциональный текущему значению скорости привода поворота, сдвигаются соответственно
в блоках 54 и 52 задержки импульсами, поступающими на один вход формирователя 15 сигнала прогноза, частота которых соответствует текущему значению скорости ротора, и затем соответственно в блоках 55 и
53 задержки импульсами, поступающими на другой вход формирователя 15 сигнала прогноза, частота следования которых соответствует текущему значению скорости конвейера роторной стрелы, т.е. блоки 5255 задержки имитируют транспортный тракт перемещения ископаемого от забоя к месту установки измерителей производительности по массе и обьемной производительности. Сигналы с выходов
преобразователей 49 и 50 и с выхода блока 55 задержки поступают соответственно на входы интегратора 57, в котором по фронту импульсов с выхода блока 53, поступающих на первый тактовый вход интегратора 57,
формируются интегральные показатели, оп- ределяемые выражениями (6)-(8). Импульсом с выхода блока 56 задержка фронта импульса, на вход которого поступает сигнал с выхода блока 53 задержки, поступающим на второй тактовый вход интегратора 57 и входы синхронизации блоков 58 и 59 деления, измерительная часть интегратора 57 устанавливается в О и в блоках 5В и 59 деления, на входы делимых которых покупают сигналы соответственно с первого и второго выходов интегратора 57 и ча объединенные входы делителей поступает сигнал с третьего выхода интегратора 57, начинается определение коэффициентов прогноза в соответствии с выражениями (9) и (10).
Одновременно осуществляется считывание информации из заданных адоесным счетчиком 64 ячеек памяти блоков 62 и 63 памяти, которая по сигналу с выхода формирователя 66 длительности тактовых импульсов записывается в регистры 67 и 68, с выходов которых коды, соответствующие коэффициентам прогноза на данном участке реза, полученным на предыдущем резе, поступают на входы цифроаналоговых преобразователей 69 и 70, с выходов которых сигналы поступают на вторые аходы Блоков 72 и 73 умножения. Сигналы на выходах блоков 72 и 73 умножения будут соответствовать прогнозируемым значениям производительности по массе и объемной производительности, определяемым согласно выражениям (11) и (12), После окончания определения коэффициентов прогноза в блоках 58 и 59 деления сигналы с их логических выходов готовности результата поступают на входы формирователей 60 и 61 длительности тактовых импульсов, которые формируют импульсы записи, поступающие на входы записи (считывания) блоков 62 и 63 памяти.
Записанные на данном участке отрабатываемого реза коэффициенты прогноза будут использоваться на том же участке последующего реза.
Регулируемый блок 71 опорного напряжения используется для установки масштаба преобразования цифроаналоговых преобразователей 69 и 70. Коммутатор 65 направления поворота переключается резервными контактами командоаппарата управления реверсом, входящим в состав оборудования роторного экскаватора, и определяет режим работы адресного счетчика 64 (сложение или вычитание поступающих на его счетный вход импульсов), определяя наличие сигнала О или Т на входе разрешений сложения (вычитания) счетчика 64.
Каждый из корректирующих блоков 28 и 43 работает следующим образом (фиг. 5). Сигнал, поступающий на первый вход селектора 78 максимального сигнала с выхода
регулируемого источника 75 опорного сигнала, соответствует нижнему пределу сигнала задания скорости. Пока сигнал на входе блока не превышает заданного поро- :ового уровня, соотпетствующего моменту
достижения максимальной скорости, сигнал О с выхода порогового элемента 74 обеспечивает замкнутое состояние коммутатора 76, и сигнал с входа блока проходит на второй селектора 78 максимального сигнала. При достижении входным сигналом порогового уровня -гозбятывает пороговый элемент 71, обеспечивал размыкание цепи коммутатора 76 и выдачу сигнапа через блок 77 масштаба на третий вход селг-ктора 78.
на вход которого поступает наибольший из сигналов поступающих на его входы. Сигнал с выхода порогового элемента при наличии 1 на выходе блока 77 масштаба равен сигналу заданного порогового значения.Таким образом, данный нелинейный блок обеспечивает прохождение иго входного сигнала, когда последний-находится в заг данных пределах его изменения.
Интегратор 57 работает следующим oft
разом (фиг. 6). Импульсы, поступающие на входы блока, накапливаются в счетчиках 79 81. При поступлении тактового сигнала на первый тактовый вход блока информация г выходов счетчиков записывается в регист. 1 82-84, с выходов которых она поступает на выходы блока. При поступлении тактово го сигнала на второй тактовый вход блока счетчики 79-81 срабатываются в ноль.
Работу блоков задержки (фиг. 7) удобно
рассматривать, используя импульсные временные диаграммы его работы (фиг. 8).
Сигнал, поступающий на информационный вход блока, переводит D-триггер 85 в единичное состояние и единица с его неинверсного выхода (Јз) поступает на информационный вход 91 оперативной памяти и на второй вход элемента И 87. При поступлении сигнала на тактовый вход блока (Јi) на выходе адресного счетчика 92 устанавливается адрес необходимой ячейки памяти, из которой считывается ранее записанная информация, которея поступает на выход блока. По истечении времени задержки элемента 86 задержки фронта импульса, которое равно по величине (гсч) , сигнал с его выхода (Ј2) поступает на первый вход элемента И 87, с выхода которого сигнал поступает на вход формирователя 88 коротких импульсов, сигнал с выхода которого)
поступает на вход записи (считывания) узла 91 оперативной памяти, обеспечивая запись информации, поступающей на его информационный вход и на вход инвертора 90, с выхода которого сигнал (ЈБ) поступает на вход формирователя 89, который формирует короткий импульс (Јб) , устанавливающий D-триггер 85 в исходное состояние, переводя его в режим ожидания
Адресный счетчик 92 работает в режима вычитания поступающих на его счетный вход импульсов из предварительно установленного с помощью узла 93 предустановки значения, пропорционального длине моделируемого участка (по коли 1еству импульсов соответствующего датчика скорости) При установке показаний счетчика в О агтома- тически осуществляется предустановил т е. при прохождении всей длины моделируемого участка из памяти извлекается сигнал, который был записан в начале делируе- мого участка в ячейку памяти ч которой соответствует значению с зыкодл узла 93 предустановки, и в ту же ячейку записывается сигнал, соответствующий значению моделируемой величины в начале участка моделирования в текущий момент времени Формула изобретения 1. Способ автоматизированного управления рабочим процессом роторного экскаватора, включающий непрерывное измерение параметров, характеризующих интенсивность нагружения роторного з z- каватора, масшабирование значений измеренных параметров по принципу равенства значений параметров в их номинальных ре жимах, непрерывное измерение параметров, характеризующих движение приводов роторного экскаватора, отличающийся тем, что, с целью повышения производительности работы и срока службы роторного экскаватора, в процессе отработки каждого реза формируют сигналы, пропорциональные прогнозируемым значениям производительности по массе и объемной производительности, путем запоминания угла поворота роторной стрелы и текущего значения интенсивности нагрузки привода ротора на время транспортного запаздывания, равного суммарному транспортированию породы роуором и конвейером роторной стрелы до места установки измерителей по массе и объемной производительности, определения и запоминания отношений текущих значений производительности по массе и объемной производительности к соответствующим текущим значениям интенсивности нагрузки привода ротора за время одного реза, умножения
на следующем резе текущих значений интенсивности нагрузки привода ротора ча jKc if ия отношений запомненных на предыдущем резе при углах поворота роторной
стропы соответствующих углам поворота роторной стрелы на следующем резч опре делают значение сигнала управления приводом роторной стрелы путем выбора ма- Јимг 1ьногс значения из прогноз ируе0 м-, сигналов и сигналов характеризую цих интениивчость нагрузки привода роторной стрелы и интенсивность нагрузки четалло конструкций роторною экскарстора при rja- данмой скорости поворота роторной
5 стрелы определяют требуемую скорость ее поворота с учетом м гштабчруемог -1 гигнэ- лэ управления приводом псчорн и стрелы одновременно формируют ct hi - управление приводом ротора пропорциональный
0 масштабируемому сигналу интенсивности нагружения привода ротора, при акси- ма/юном значении которого и при значении интенсивности нагружения привода ротора больше номинального значения получают
5 разностный сигнал между текущим значением интенсивности нагружения привода ротора и заданным его номмнзпьным значением и затем разностный сигнал суммируют с сигналом управления приводом роторной
0 стрелы
5 дом первого блока установки масштаба, выход которого соединен с первым входом блока се актирования аналоговых сигналов выход которого соединен с пходом пер- фильтра измеритель текущего
0 значения производительности по массе выход которого соединен с входом блока второго блока установки масштаба, измеритель текущею значения нагрузки привода ротора, выход которого соединен с входом треть5 егс о л ока установки масштаба, задятчик нпминального значения параметров мя нагружения, первый сумматор, о т п и ч а- ю щ а я с я тем, что с ЦРЛЬЮ повышения производительности работы и срока службы
0 | п орного экскапатора, и систему введены измеритель нагрузки привода роторной прелы, датчики скоростей поворота роторной стрелы, роторного колеса и кс ; сйРпа роторной стрелы, четыре опока установки
5 масштаба, второй фильтр три cv мэтора формирователь абсолютного значени знз лсювого сигнала фгрм юовг.тель сигыла прогноза, формироватеть косинуса угла о- ворота, пять коммутаторов выпрями 1 рупои задатчик ре има работы
привода роторной стрелы, датчик угла пово- рота, два блока деления, пороговый элемент, блок умножения, два корректирующих блока, элемент И, два интегратора, два блока включения приводов, два индилатора и измеритель текущего значения объемной производительности, выход которого соединен с гходом четвертого блока установки масштаба, выход которого соединен с первым входом формирователя сигнала прогноза, первый и второй выходы которого соединены с вторым и -. ре i ьим входами блока селектировзния анапотвых сигналов, выход первого фильтра соединен с первым входом второго сумматора, выход которого соединен с входом порогового элемента и входом первого деления, выход которого соединен с РХОДОМ первого индикатора, первым входом второго блока деления и первым входом второго коммутатора, выход которого соединен с вторым входом первого блока деления и входом второго индикатора, выход третье о блока установки масштаба соединен с вторым входом формирователя сигнала прогноза и входом второго фильтра, выход которого соединен с первым входом первого сумматора и первым входом блока умножения, выход которого соединен с входом .гого блока установки масштаба, выход которого соединен с входом второго корректирующего блока, первый выход которого соединен с вторым входом блока умножения и первым входом третьего коммутатора, выход которого соединен с первым входом третьего сумматора, выход которого соединен с входом первого интегратора, выход которого соединен с вторым входом третьего сумматора и приводом ротора, выход задатчика режима работы привода роторной стрелы соединен с вторым входом первого сумматора, выход которого соединен с входом выпрямителя, выход которого соединен с первым входом четвертого коммутатора, выход которого соединен с вторым входом второго сумматора, выход датчика угла поворота соединен с входом формирователя косинуса угла поворота, выход которого соединен с вторым входом второго блока деления, выход которого соединен с первым входом пятого коммутатора, выход которого соединен с первым входом четвертого сумматора, выход которого соединен с входом второго интегратора, выход которого соединен с вторым входом четвертого сумматора и приводом роторной стрелы, выход измерителя нагрузки привода роторной стрелы соединен с входом седьмого блока у: ганов- ки масштаба, выход которого соединен с входом формирователя абсолютного значения аналогового сигналя, выход которого соединен с четвертым входом блока селектирования аналоговых сигналов, выходы датчиков скоростей поворота роторной стрелы, роторного колеса и конвейера роторной стрелы соединены с третьим, четвертым и пятым входами соответственно формирователя сигнала прогноза, выход второго блока установки масапаба соеди0 нен с седьмым входом формирователя сигнала прогноза второй выход второго корректирующего блока соединен с вторым входом четвертого коммутатора, выходы ручного задатчикя и зздатчикэ режима ра5 боты привода роторной стрелы соединены с вторым и третьим УОДЯМИ вторе о коммута тора, выход порогового элемента соединен с вторым входом nepbrjro коммутатора, выходы первого и второго блоков включения
0 приводов сое чинены с первым и вторым входами элемента И, выход которого соединен с вторым входом пятого коммутатора, выход первого блока включения привода соединен с вторым входом третьего коммута5 тора.
5 г тулируемый блок опорного напряжения, зыход которого соединен с первыми входами первого и второго цифроаналоговых преобразователей, выходы которых соединены с льрвыми входами первого и второго бло;
0 ков умножения соответственно, вторые входы которых обьединены и подключены к второму входу формирователя сигнала прогноза и входу первого преобразователя напряжения в частоту, выход которого
5 соединен с первым входом блока задержки, выход которого соедине.- с первым входом интегратора, первый и второй выходы кото рого соединены с первыми входами первого и второго блоков деления соответственно,
0 первые выходы которых соединены с первыми входами первого и второго блоков памяти, выходы которых соединены с первыми входами первого и второго регистров соответственно, выходы которых соединены с
5 вторыми входами первого и второго цифро- аналоговых преобразователей соответственно, выход третьего блока задержки соединен с первым входом четвертого блока задержки, выход которого соединен с входом первого формирователя длительности
тактовых импульсов, первым входом адресного счетчика, первым входом пятого блока задержки и вторым входом интегратора, третий выход которого соединен с вторыми входами первого и второго блоков деления, вторые выходы которых через второй и третий формирователи длительности тактовых импульсов соединены с вторыми входами блоков памяти соответственно, выход коммутатора соединен с вторым входом адресного счетчика, выход которого соединен с третьими входами первого и второго блоков памяти, выход первого формирователя длительности тактовых импульсов соединен с вторыми входами первого и второго регистров соответственно, выход пятого элемента задержки соединен с третьими выходами интегратора, первого и второго блоков деления, выходы второго и третьего преобразователей напряжения в частоту соединены с четвертым и пятым входами интегратора, а их входы подключены к первому i седьмому входам формирователя сигнала прогноза, третий вход которого подключен первому входу третьего блока задержки и подключен
Фиг.1
к четвертому входу формирователя сигнала прогноза, пятый вход которого подключен к вторым входам второго и четвертого блоков задержки, выходы формирователя сигнала прогноза подключены к выходам первого и второго блоков умножения.
Тр
Измеритель объемной
роизбойитем - jfocmu
/иг/мер
щ/пель
npoutfodu/nejwocmts по яассе
ФигЗ
улрабления
n/tufotfff/i
ро/п0/ а
8109891
Фиг. 6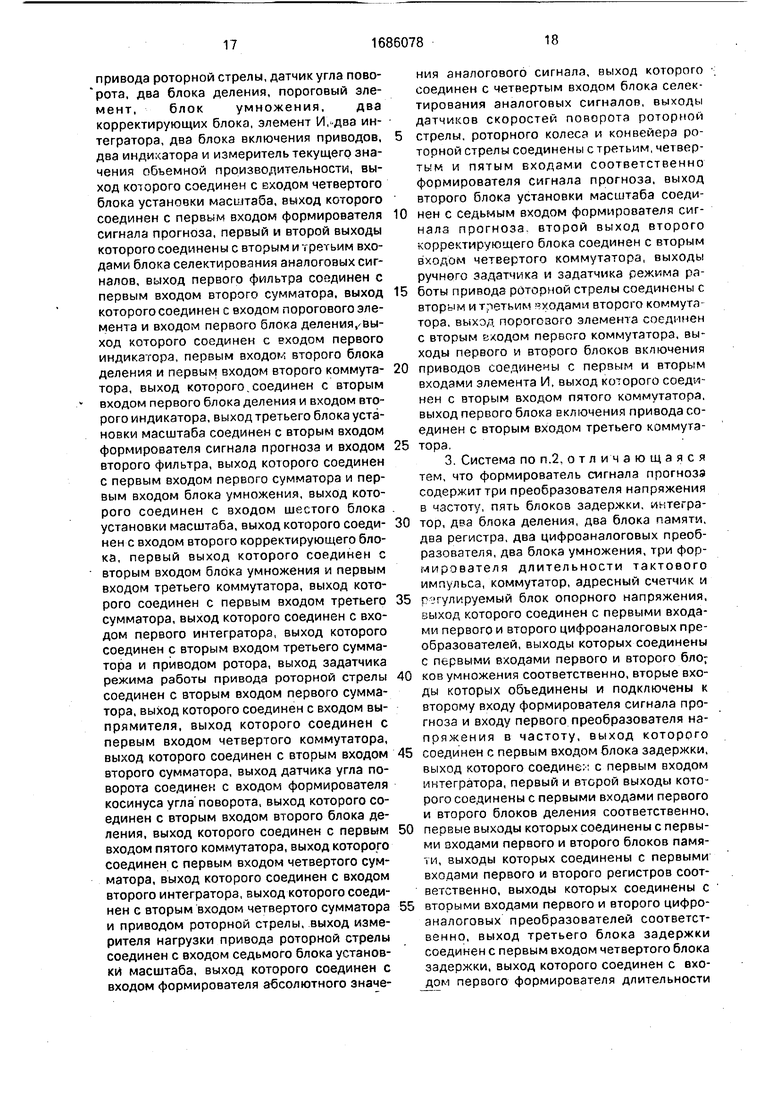
| Способ формирования управляющего воздействия на привод поворота роторной стрелы роторного экскаватора и устройство для его осуществления | 1984 |
|
SU1469030A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ задания скорости поворотного механизма роторного экскаватора | 1979 |
|
SU910942A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
