со
СП
СЛ
4 to
Изобретение относится к разгрузочным устройствам, преимущественно, легкоповреждаемых грузов из тары (фруктов, овощей).
Цель изобретения - расщирение функциональньк возможностей и повышение безопасности.
На фиг.1 изображен опрокидьшатель, вид сбоку (исходное положение) ю образом.
гайка им вдоль бо нение ус водного ровочног разует ш ханизмы
Опрок
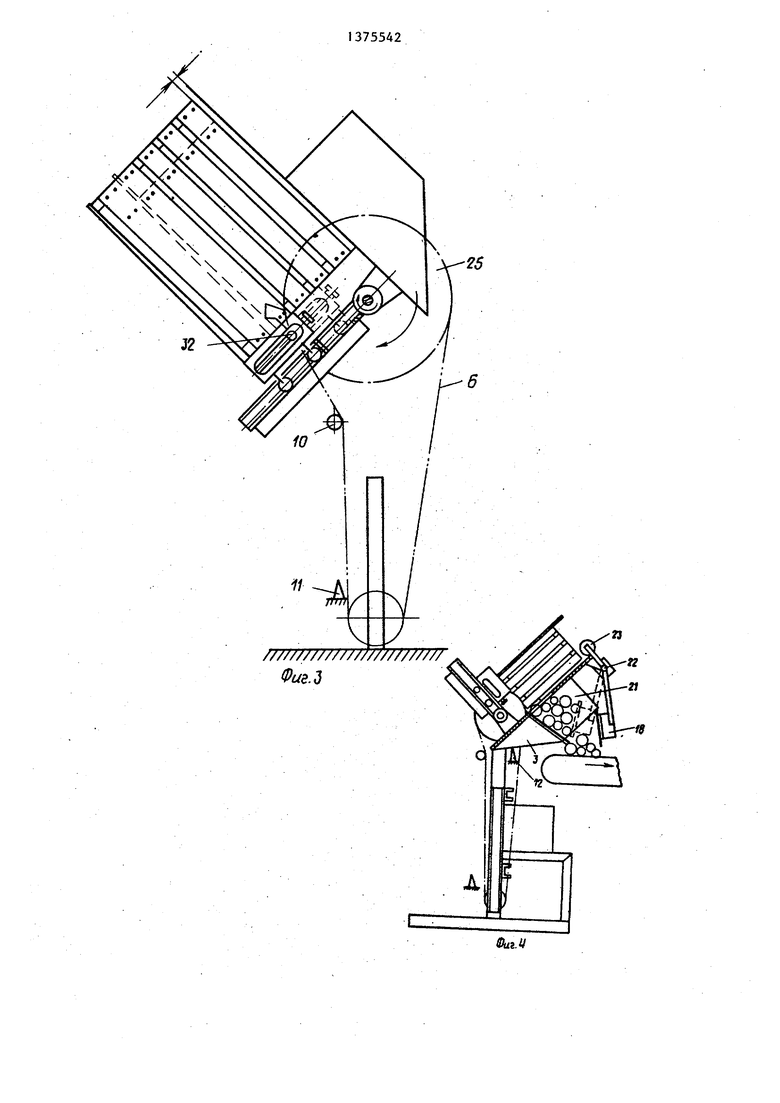
на фиг.2 - то же, вид спереди; на фиг.З - подъем контейнера вверх; на фиг.4 - разгрузка контейнера; на фиг.5 - опрокидьшатель, отрегулированный на работу с контейнерами для по дъема на минимальную высоту; на фиг. 6 - то же, при работе с контейнерами для подъема на максимальную высоту ; на фиг. 7- вид А на фиг. 6 . Опрокидьшатель содержит основание 1, раму 2, крьшжу 3, привод 4, приводной вал 5, приводной контур 6 и платформу 7. Основание 1 представяет собой металлоконструкцию, соВ исх каретка- упор 1I, обеспечи
15 ное поло опущены, щения на направля 18 закрыв
20 ребра 28 тельно в тейнеры вод опро движение
20 ребра 28 устанавливается предвари тельно вскрытая тара, например ко тейнеры с плодами. Включается при вод опрокидьшателя, от которого движение через приводной вал 5 и
держащую вертикальные стойки 8, нап- 25 ведущие элементы 25 передается на
равляющие 9, обводные элементы 10 и упоры 11 и 12 с конечными выключате- . лями. В средней части основания 1 установлен привод 4, а на вертикальных стойках 8 - приводной вал 5. На приводной вал 5 с возможностью вращения вокруг него установлена рама 2, в направляющих 13 которой имеются пазы, обеспечивающие свободное перемеприводной контур 6. Приводной кон 6, с которым связана платформа 7, перемещает ее по направляющим 9 и переводит в направляющие 13. Пос 30 перехода платформы 7 в направляющи 13 ее ролики 27, воздействуя на вы тупы 14 фиксаторов 15, вьшодят фик сатор из зацепления с направляющей обеспечивая возможность вращения
образом.
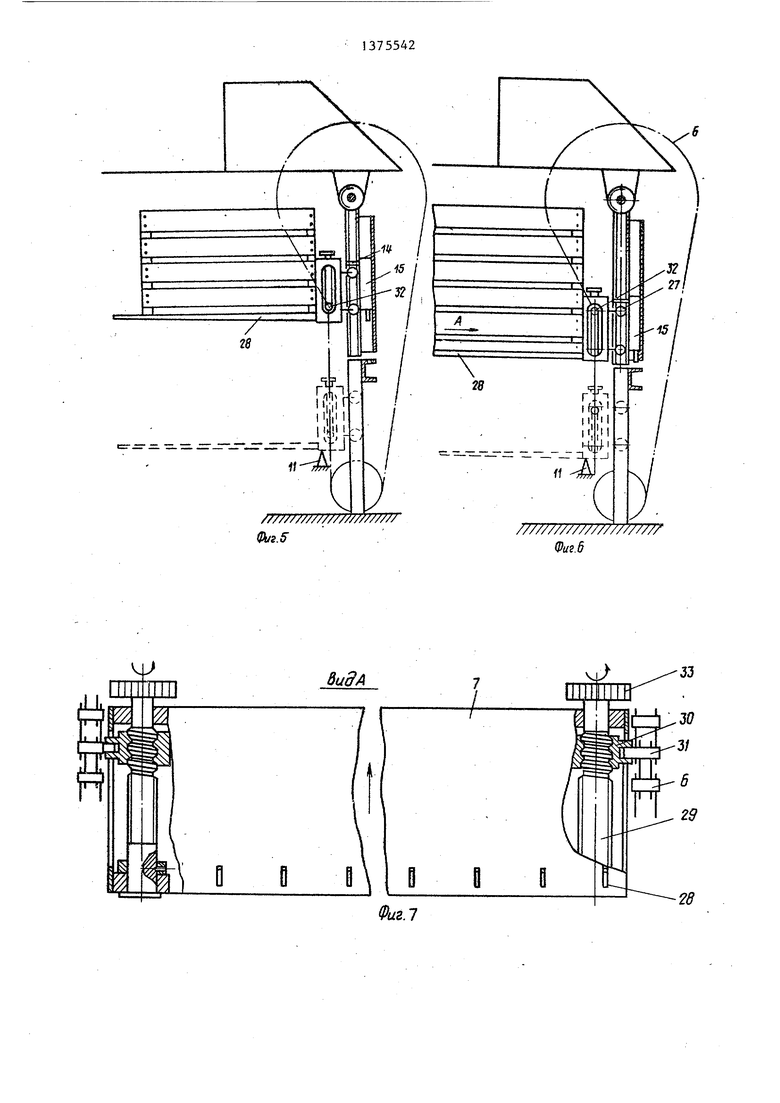
гайка имеет возможность перемещения вдоль боковых пазов каретки. Соединение установочного пальца 31 приводного контура 6 и гайки 30 регулировочного механизма платформы 7 образует шарнир 32. Регулировочные механизмы снабжены рукоятками 33.
Опрокидыватель работает следующим
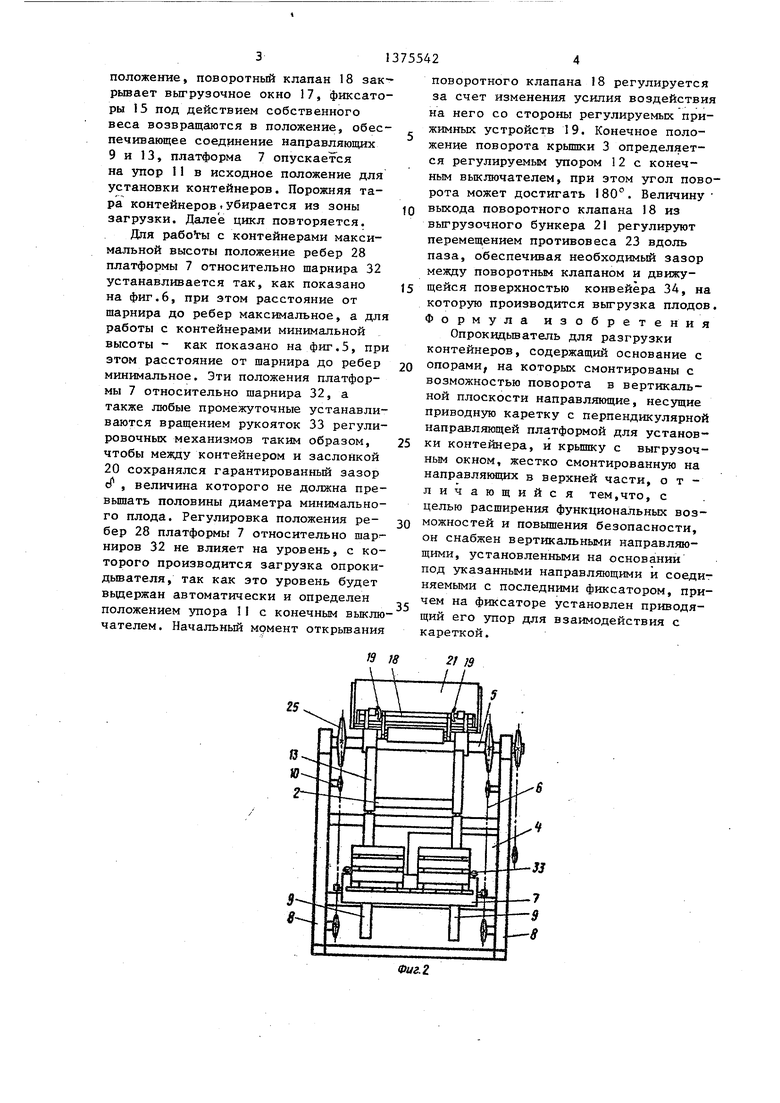
В исходном положении, при котором каретка- 26 платформы 7 опущена на упор 1I, рама 2 упирается в упор 24, обеспечивая устойчивое горизонтальное положение крьппки 3, фиксаторы 15 опущены, препятствуя возможности смещения направляющих 13 относительно направляющих 9, и поворотный клапан 18 закрывает выгрузочное окно 17,на/
ребра 28 устанавливается предварительно вскрытая тара, например контейнеры с плодами. Включается приод опрокидьшателя, от которого вижение через приводной вал 5 и
ведущие элементы 25 передается на
приводной контур 6. Приводной контур 6, с которым связана платформа 7, перемещает ее по направляющим 9 и переводит в направляющие 13. После 30 перехода платформы 7 в направляющие 13 ее ролики 27, воздействуя на выступы 14 фиксаторов 15, вьшодят фиксатор из зацепления с направляющей У, обеспечивая возможность вращения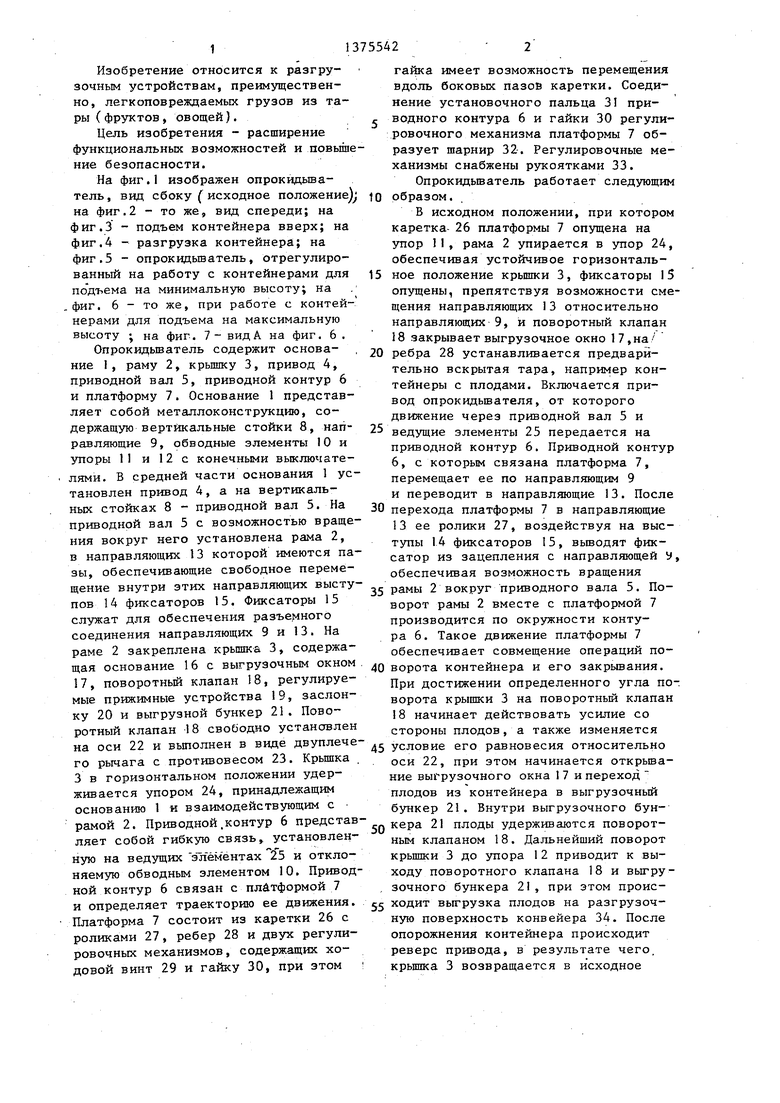
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство опрокидывания контейнеров для разгрузки | 1987 |
|
SU1498679A1 |
| Плодоуборочная машина | 1983 |
|
SU1143340A1 |
| Устройство для опорожения контейнеров с плодами | 1976 |
|
SU569487A1 |
| Машина для уборки томатов | 1990 |
|
SU1819523A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ СТРОИТЕЛЬНЫХ БЛОКОВ ПРЕССОВАНИЕМ, ПРЕСС-ФОРМА И ЛИНИЯ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1995 |
|
RU2087307C1 |
| Устройство для выгрузки легкоповреждаемых грузов из транспортных средств | 1990 |
|
SU1794841A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ КОНТЕЙНЕРОВ | 2024 |
|
RU2831750C1 |
| АГРЕГАТ ДЛЯ ВЫБОРОЧНОЙ УБОРКИ ПЛОДОВ ОВОЩНЫХ И БАХЧЕВЫХ КУЛЬТУР | 2010 |
|
RU2428831C1 |
| Станок для сборки щитов деревянной тары | 1982 |
|
SU1117215A1 |
| ШИРОКОЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
RU2019949C1 |
Изобретение относится к разгру- зочньв4 устройствам, используёмьм для работы с легкоповреждаемыми грузами (тары(фруктов, овощей). Цель изобретения - расширение функциональных возможностей и повышение безопасности, Опрокидьгоатель содержит основание 1, сочлененные вертикальные направляющие 9 и 13, закрепляемые между собой фиксатором 15, каретку 26 с платформой 7, крышку 3 с выгрузочным окном 17. Контейнеры устанавливаются на платфо1 у 7 и поднимаются , вверх, при этом каретка перемещает фиксатор 15 и разъединяет направляющие 9 и 13. При дальнейшем подъеме контейнер соединяется с крышкой и поворачивается вместе с направляющей 13 вокруг вала 5 для последующей разгрузки на рядом стоящий конвейер, 7 ил. сл
щение внутри этих направляющих высту- 5 рамы 2 вокруг приводного вала 5. Попов 14 фиксаторов 15. Фиксаторы 15 служат для обеспечения разъемного соединения направляющих 9 и 13. На раме 2 закреплена крьппка 3, содержащая основание 16 с выгрузочным окном. Q ворота контейнера и его закрывания.
ворот рамы 2 вместе с платформой 7 производится по окружности контура 6. Такое движение платформы 7 обеспечивает совмещение операций по17, поворотньй клапан 18, регулируемые прижимные устройства 19, заслонку 20 и выгрузной бункер 21. Поворотный клапан 18 свободно установлен
При достижении определенного угла поворота крышки 3 на поворотный клапан 18 начинает действовать усилие со стороны плодов, а также изменяется на оси 22 и выполнен в виде двуплече- условие его равновесия относительно го рычага с противовесом 23. Крьшка . 22, при этом начинается открьша- 3 в горизонтальном положении удер- выгрузочного окна 1 7 и переход живается упором 24, принадлежащим плодов из контейнера в выгрузочный основанию 1 и взаимодействующим с бункер 21. Внутри выгрузочного бун- рамой 2. Приводной,контур 6 представ- 21 плоды удерживаются поворот. «ч -г тттл г ТЭСТОТ- ТГГ Т ЯН Л И.,.-.. .-- 1О ТТ- ™ .-.J-L .... А,р«
ляет собой гибкую связь установленную на ведущих э11ём ентах и отклоняемую обводным элементом 10. Приводной контур 6 связан с платформой 7 и определяет траекторию ее движения. Платформа 7 состоит из каретки 26 с роликами 27, ребер 28 и двух регулировочных механизмов, содержащих ходовой винт 29 и гайку 30, при этом .
ным клапаном 18. Дальнейший поворот крышки 3 до упора 12 приводит к выходу поворотного клапана 18 и вьп ру- зочного бункера 21, при этом проис- 55 ходит выгрузка плодов на разгрузочную поверхность конвейера 34. После опорожнения контейнера происходит реверс привода, в результате чего. крыЕзка 3 возвращается в исходное
рамы 2 вокруг приводного вала 5. Поворота контейнера и его закрывания.
ворот рамы 2 вместе с платформой 7 производится по окружности контура 6. Такое движение платформы 7 обеспечивает совмещение операций поПри достижении определенного угла поворота крышки 3 на поворотный клапан 18 начинает действовать усилие со стороны плодов, а также изменяется условие его равновесия относительно 22, при этом начинается открьша- выгрузочного окна 1 7 и переход плодов из контейнера в выгрузочный бункер 21. Внутри выгрузочного бун- 21 плоды удерживаются поворот,.-.. .-- 1О ТТ- ™ .-.J-L .... А,р«
ным клапаном 18. Дальнейший поворот крышки 3 до упора 12 приводит к выходу поворотного клапана 18 и вьп ру- зочного бункера 21, при этом проис- 5 ходит выгрузка плодов на разгрузочную поверхность конвейера 34. После опорожнения контейнера происходит реверс привода, в результате чего. крыЕзка 3 возвращается в исходное
ТтЩ/
/7/7 ////////////////////
Фиг.
п
///////////////////////// Фаг.5
ВидА
Q О
/////////////////////// %г.5
33
б О
Фиг.1
28
| Проспект Rovesciatori Turvo- Bins фирмы Costruzione maccine agricole, mod Rov F/B (Италия). |
