2.Машина по п. 1, отличающаяся тем, что подъемно-поворотный механизм выполнен в виде трубы, которая имеет вырез и фигурный паз, причем в зоне подъема и спуска паз выполнен по образующим цилиндра и по винтовой линии в зоне поворота, а внутри трубы размещен цилиндр, установленный с возможностью осевого и радиального перемещений относительно трубы и жестко закрепленный с вильчатым подхватом, при этом цилиндр имеет ролик, размещенный в фигурном пазу.
3.Машина по пп. 1 и 2, отличающаяся тем, что на трубе в зоне сопряжения прямолинейных участков паза с криволинейными закреплены две подпружиненные защелки и рь1чаг включения кулачковой муфты подъемно-поворотного механизма, а устройство для выгрузки контейнеров выполнено в виде по крайней мере двух рольгангов, соединенных площадкой для опускания контейнеров, выполненной в виде подпружиненного параллелограммного механизма, причем первый рольганг установлен наклонно под углом к раме и имеет фиксатор, а второй щарнирно соединен с рамой и установлен на опорные колеса, которые соединены с его рамой при помощи подпружиненных рычагов и фиксаторов.
4. Машина по пп. 1-3, отличающаяся тем, что, с целью уменьшения габаритов, первый рольганг расположен над движителем рамы.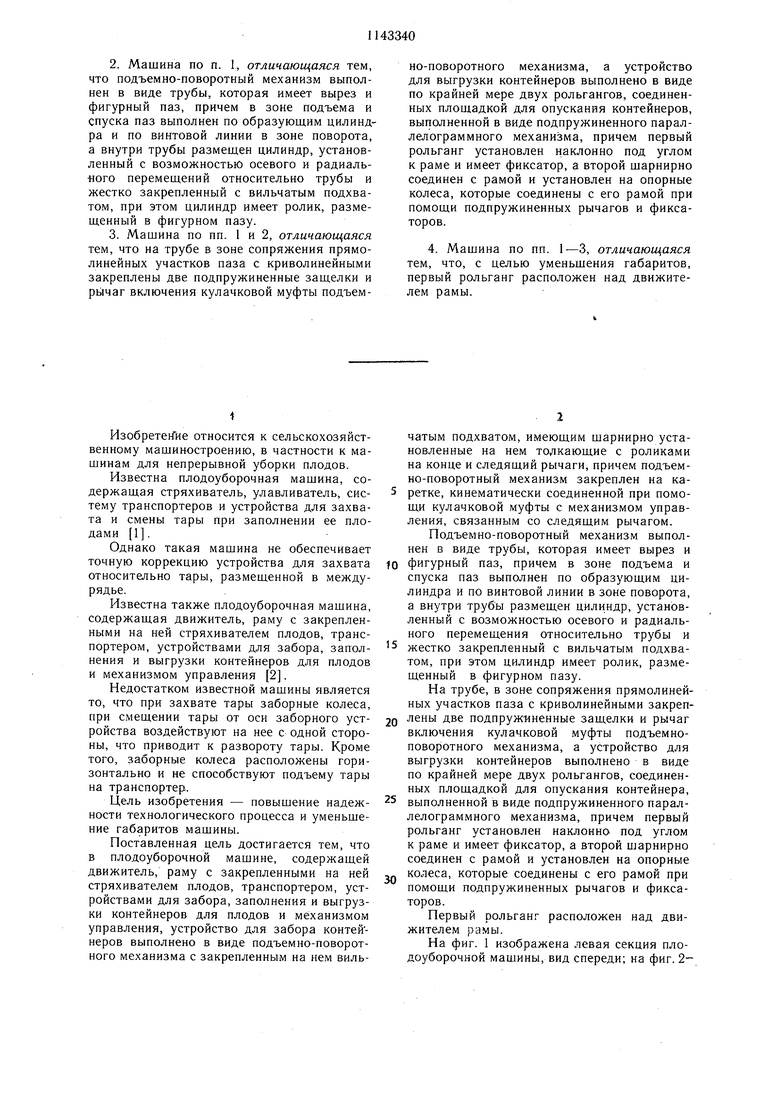
| название | год | авторы | номер документа |
|---|---|---|---|
| Плодоуборочная машина | 1986 |
|
SU1419583A1 |
| Улавливатель плодоуборочной машины | 1982 |
|
SU1055399A1 |
| Улавливатель плодов | 1982 |
|
SU1101196A1 |
| Плодоуборочная машина | 1987 |
|
SU1604226A1 |
| Автоматическая линия для производства керамических изделий | 1986 |
|
SU1369898A1 |
| Плодоуборочная машина | 1983 |
|
SU1123584A1 |
| Приспособление для выгрузки заполненной тары на плодоуборочной машине | 1989 |
|
SU1713479A1 |
| Плодоуборочная машина | 1979 |
|
SU990124A1 |
| Машина для сбора плодов | 1985 |
|
SU1335172A1 |
| МНОГОФУНКЦИОНАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2641951C1 |
1. ПЛОДОУБОРОЧНАЯ МАШИНА, содержащая движитель, раму с закрепленными на ней стряхивателем плодов, транспортером, устройствами для забора, заполнения и выгрузки контейнеров для плодов и механизмом управления, отличающаяся тем, что, с целью повышения надежности технологического процесса, устройство для забора контейнеров выполнено в виде подъемно-поворотного механизма с закрепленным на нем вильчатым подхватом, имеющим шарнирно установленные на нем толкающие с роликами на конце и с,;едящий. рычаги, причем подъемно-поворотный механизм закреплен на каретке, кинематически соединенной при помощи кулачковой муфты с механизмом управления, связанным со спедящим рычагом.
Изобретение относится к сельскохозяйственному машиностроению, в частности к машинам для непрерывной уборки плодов.
Известна плодоуборочная машина, содержащая стряхиватель, улавливатель, систему транспортеров и устройства для захвата и смены тары при заполнении ее плодами 1.
Однако такая машина не обеспечивает точную коррекцию устройства для захвата относительно тары, размещенной в междурядье.
Известна также плодоуборочная машина, содержащая движитель, раму с закрепленными на ней стряхивателем плодов, транспортером, устройствами для забора, заполнения и выгрузки контейнеров для плодов и механизмом управления 2.
Недостатком известной машины является то, что при захвате тары заборные колеса, при с.мещении тары от оси заборного устройства воздействуют на нее с одной стороны, что приводит к развороту тары. Кроме того, заборные колеса расположены горизонтально и не способствуют подъему тары на транспортер.
Цель изобретения - повыщение надежности технологического процесса и уменьшение габаритов машины.
Поставленная цель достигается тем, что в плодоуборочной машине, содержащей движитель, раму с закрепленными на ней стряхивателем плодов, транспортером, устройствами для забора, заполнения и выгрузки контейнеров для плодов и механизмом управления, устройство для забора контейнеров выполнено в виде подъемно-поворотного механизма с закрепленным на нем вильчатым подхватом, имеющим шарнирно установленные на нем толкающие с роликами на конце и следящий рычаги, причем подъемно-поворотный механизм закреплен на каретке, кинематически соединенной при помощи кулачковой муфты с механизмом управления, связанным со следящим рычагом.
Подъемно-поворотный механизм выполнен в виде трубы, которая имеет вырез и
фигурный паз, причем в зоне подъема и спуска паз выполнен по образующим цилиндра и по винтовой линии в зоне поворота, а внутри трубы размещен цилиндр, установленный с возможностью осевого и радиального перемещения относительно трубы и
жестко закрепленный с вильчатым подхватом, при этом цилиндр имеет ролик, размещенный в фигурном пазу.
На трубе, в зоне сопряжения прямолинейных участков паза с криволинейными закреплены две подпружиненные защелки и рычаг включения кулачковой муфты подъемноповоротного механизма, а устройство для выгрузки контейнеров выполнено в виде по крайней мере двух рольгангов, соединенных площадкой для опускания контейнера, выполненной в виде подпружиненного параллелограммного механизма, причем первый рольганг установлен наклонна под углом к раме и имеет фиксатор, а второй шарнирно соединен с рамой и установлен на опорные
колеса, которые соединены с его рамой при помощи подпружиненных рычагов и фиксаторов.
Первый рольганг расположен над движителем рамы.
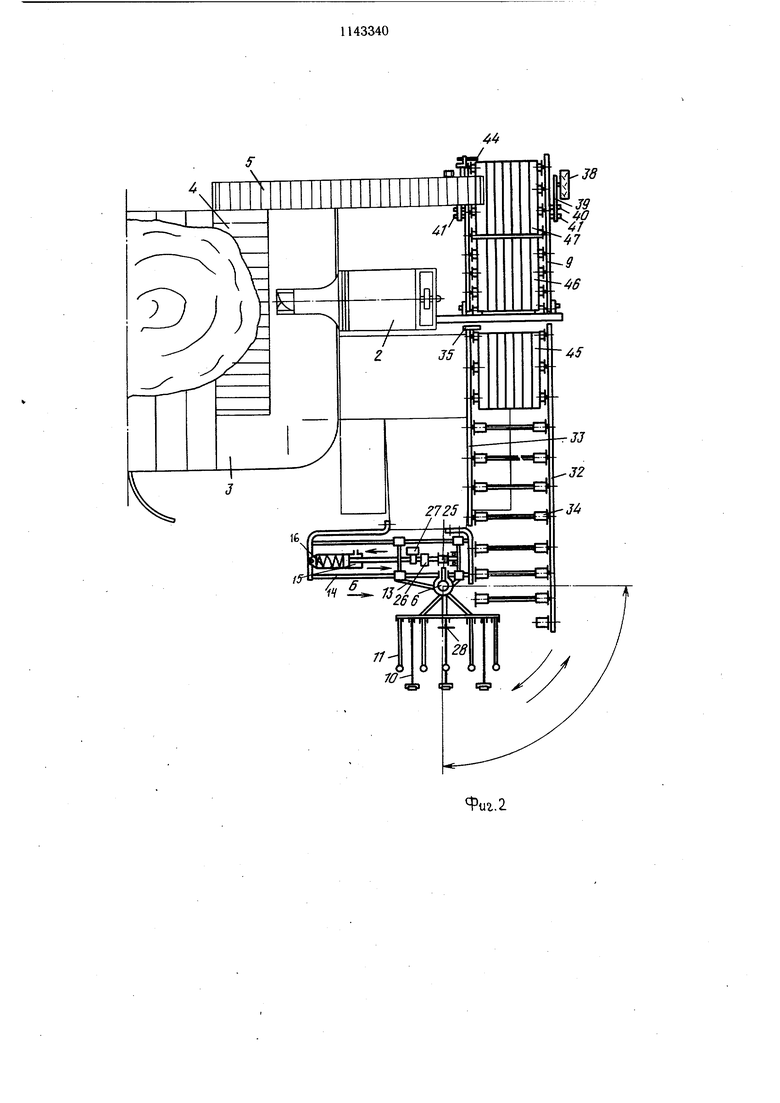
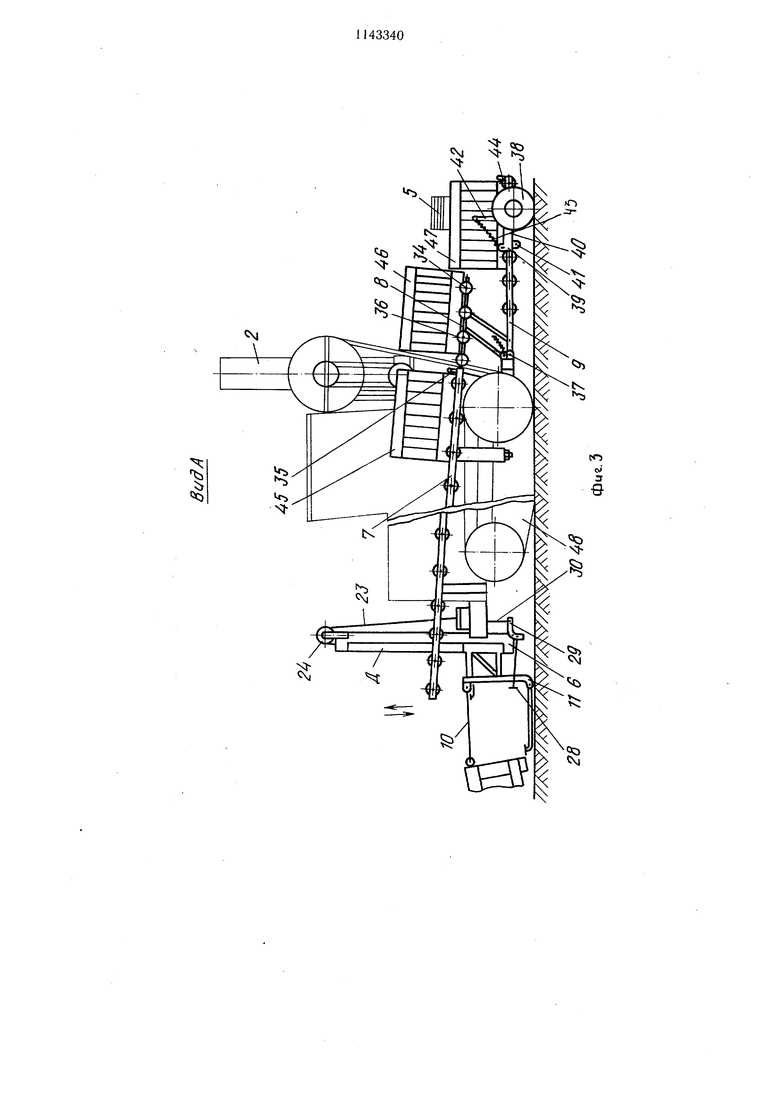
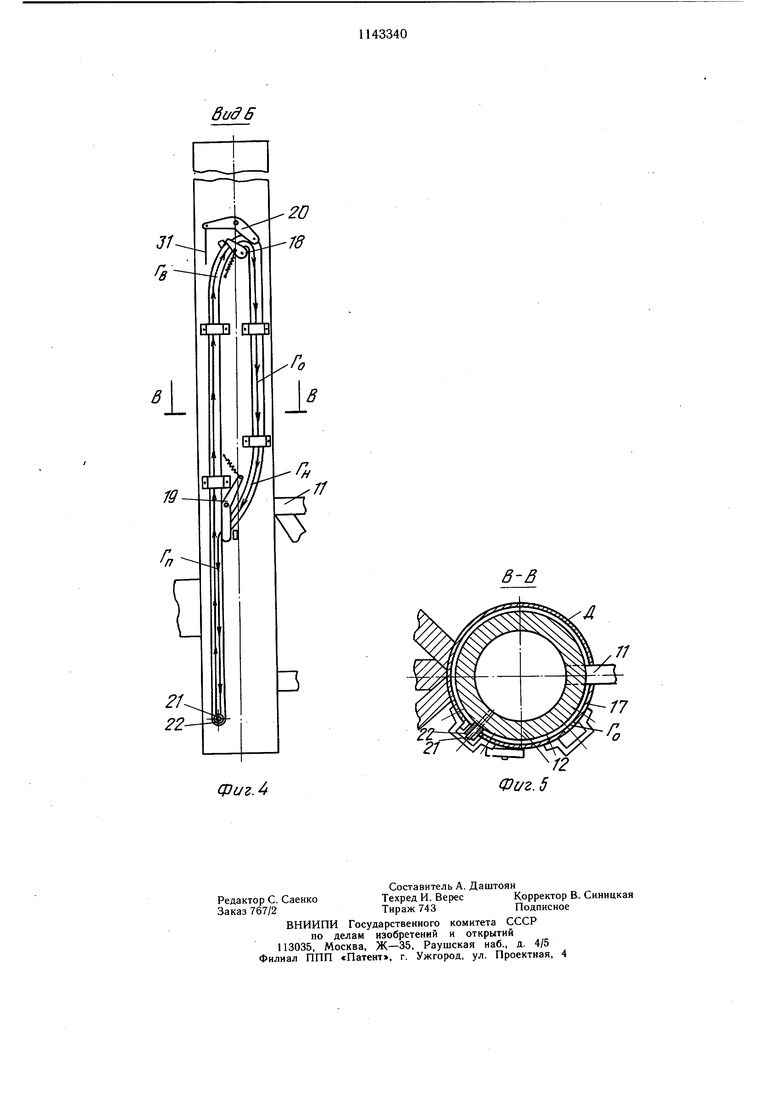
На фиг. 1 изображена левая секция плодоуборочной машины, вид спереди; на фиг. 2то же, вид сверху; на фиг. 3 - вид А на фиг. 1; на фиг. 4 - вид Б на фиг. 2; на фиг. 5 - разрез В-В на фиг. 4.
Плодоуборочная машина состоит из двух одинаковых секций, правой и левой, получающих привод от вала отбора мощности тракторов и гидромоторов. Каждая секция навешена на раму трактора 1 и состоит из пневматического стряхивателя 2 плодов, установленного на раме сзади трактора, улавливателя 3 плодов, размещенного на раме, шарнирно установленной сбоку трактора, системны транспортеров 4 и 5 для передачи плодов с улавливателя 3 в контейнеры, установленного спереди трактора устройства 6 для забора контейнеров с земли и подъема их на рольганг 7, размещенный сбоку трактора и передающий контейнеры на площадку 8 для опускания контейнеров, которая является продолжением рольганга 7 устройства 9 для выгрузки контейнеров в междурядье.
Устройство 6 для забора контейнеров состоит из толкающих рычагов 10 с роликами, вильчатого подхвата 11, закрепленного на внутреннем цилиндре 12, подъемно-поворотного механизма; Последний закреплен на каретке 13, которая по направляющим 14 при помощи гидроцилиндра 15 и возвратной пружины 16 может перемещаться перпендикулярно движению машины.
Подъемно-поворотный механизм состоит из наружной трубы 17, закрепленной к каретке 13 и имеющей четвертной вырез Д и фигурный паз Гп - Га - Го-Г. На трубе 17 установлены две подпружиненные защелки 18 и 19 и двуплечий рычаГ 20, выключения кулачковой муфты подъемного устройства.
Внутри трубы 17 с возможностью перемещения вдоль ее оси и поворота на 90° установлен цилиндр 12, с которым жестко соединяется вильчатый подхват 11. На цилиндре 12 закреплена ось 21 с роликом 22, который входит в фигурный паз Гд - ГБ-Го - Гн трубы ,17.
Подъем вильчатого подхвата осуществляется блочно-тросовой системой. Трос 23 (фиг. 3) закреплен на цилиндре 12 подъемного механизма, перекинут через блок 24 и намотан на барабан 25, который кулачковой муфтой 26 соединяется и разъединяется с гидромотором-редуктором 27. Включение кулачковой муфты производится следящим рычагом 28 через двуплечий рычаг 29 и тягу 30, выключение - рычагом 20 и тягой 31. Следящий рычаг 28 служит также для открытия сливного клапана гидроцилиндра 15.
Рольганг 7 с целью уменьшения габаритов мащины смонтирован над движителем трактора, состоит из двух параллельных брусьев 32 и 33, к которым закреплены оси с роликами 34. В передней части рольганга оси роликов закреплены консольно к брусу 32 с целью свободного прохода вильчатого
под.хвата 11 через рольганг при установке контейнера на рольганг. В задней части рольганга 7 смонтирован фиксатор 35, удерживающий контейнер от скатывания с рольганга.
Продолжением рольганга 7 является площадка 8 для опускания контейнера, выполненная в виде рамки с роликами 36 и соединенная при помощи подпружиненного параллелограммного механизма 37 с рамой роль0 Ганга устройства для выгрузки контейнеров. Устройство для выгрузки контейнеров состоит из рольганга передней частью шарнирно связанного с рамой трактора, задней - опирающегося на два колеса 38, оси
, которых закреплены на рычагах 39, установленных с возможностью поворота на осях 40. От поворота рычаги 39 удерживают фиксаторы 41. С рычагом 39 и жестко закрепленным на раме устройства 9 кронштейном 42 соединена пружина 43. В задней
0 части устройства 9 установлен фиксатор 44, который удерживает контейнер от скатывания с рольганга. Положение фиксатора изменяется из кабины трактора. На машине устанавливаются контейнеры 45-47 и имеется движитель 48.
Машина работает следующим образом.
Двигаясь с двух сторон убираемого ряда деревьев, правая и левая секции машины пневматическими стряхивателями 2 производят съем плодов, которые падают на улавливатель 3 и транспортерами 4 и 5 подаются в контейнер.
Подача контейнеров под загрузку и смена их при загрузке плодами производятся в следующей последовательности. Пустые
5 контейнеры предварительно расставляются в междурядье. Перед началом движения три контейнера 45-47 (фиг. 3) загружаются на машину. При движении плодоуборочной .машины по междурядью тракторист с помощью гидроцилиндра 15 корректирует положение вильчатого подхвата 11 перемещением по направляющим 14 так, что середина подхвата попадает на середину контейнера. Толкающие рычаги 10 (фиг. 2 и 3), имея большую длину, чем лапки вильчатого подхвата 11, первыми упираются в верхнюю часть контейнера, производя наклон его вперед по ходу движения машины. Поднятое над поверхностью почвы дно контейнера позволяет лапкам вильчатого подхвата 11 подхватить контейнер. При дальнейшем движении машины толкающие рычаги 10, имея на концах свободно вращающиеся ролики, соскальзывают со стенки контейнера, который, перемещаясь по подхвату 11, нажимает на следящий рычаг 28 включения кулачковой муфты 26 привода подъемно-поворотного механизма вильчатого подхвата, что приводит к соединению гидромотора-редуктора 27 с барабаном 25. Одновременно с соединением кулачковой муфты 26 следящий рычаг 28 открывает сливной клапан гидроцилиндра 15 и усилием пружины 16 через поршень и шток гидроцилиндра каретка 13 по направляющим 14 смещается в крайнее левое положение. Барабан 25, вращаясь, наматывает на себя трос 23, который через блок 24 перемещает вверх цилиндр 12, жестко связанный с подхватом 11. Кронштейн подхвата перемещается в четвертном вырезе Д трубы 17, а ролик 22 - по пазу Гп. В верхней части трубы 17 паз Гб выполнен по винтовой линии, что заставляет ролик 22, перемещаясь в пазу Г, поворачивать цилиндр 12 относительно его оси на 90°. Вместе с цилиндром 12 на 90° поворачивается и подхват 11 с контейнером. Когда ролик 22 доходит до верхней точки паза Гв, он поворачивает рычаг 20, который через тягу 31 выводит кулачковую муфту 26 из зацепления с барабаном 25, предоставляя ему возможность свободно вращаться на своей оси. Под действием силы тяжести подхват 11 вместе с контейнером опускается вниз, при этом ролик 22 перемещается по пазу Го, контейнер устанавливается на рольганг, а лапки вильчатого подхвата 11 проходят между консольно закрепленными на брусе 32 роликами 34. После того, как лапки подхвата опускаются ниже рольганга, начинается разворот подхвата в обратном направлении, так как ролик 22 в это время попадает в винтовой паз IH. Повернувшись на 90°, подхват продолжает опускаться до тех пор, пока не занимает исходное положение, ролик 22 при этом перемешается и доходит до нижней части паза Г. Защелки 18 и 19 не позволяют при подъеме подхвата ролику 22 попасть в паз Гя, а при опускании - в паз Гв.
Контейнер, поставленный подхватом 11 на рольганг 7, скатывается по нему до упора в контейнер 45 или при его отсутствии в фиксатор 35.
При наполнении контейнера 47 плодами
тракторист убирает фиксатор 44 контейнера
47 и фиксаторы 41, удерживающие рычаги 39
опорных колес 38. Г1од действием силы веса
заполненного контейнера 47 рычаги 39 с
О установленными на них колесами 38, преодолевая усилие пружин 43, поворачиваются относительно осей 40. Это позволяет рольгангу занять наклонное положение, повернувшись относительно оси присоединения
j его к трактору. Контейнер 47 скатывается с рольганга. Под действием силы веса контейнера 46 площадка 8, преодолевая усилие пружины, начинает опускаться вниз и перемещаться назад, сохраняя контакт с контейнером 47. Когда площадка 8 совмещается
0 с рольгангом устройства 9 для выгрузки, контейнер 46 скатывается на место контейнера 47. При сходе последнего с устройства 9 фиксатор 44 занимает исходное положение и задерживает контейнер 46. Освободившись
, от массы заполненного контейнера, устройство 9 действием пружин 43 на рычаги 39 возвращается в горизонтальное положение. Подпружиненный параллелограм.мный механизм 37 перемещает в исходное положение площадку 8, которая, дойдя до верхнего
0 положения, поворачивает фиксатор 35 и прижимает на себя следующий контейнер с рольганга 7.
Изобретение повышает надежность технологического процесса плодоуборочной машины.
Фиг.2
в-в
Л
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент ГДР № 146885, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Jong А | |||
| Р | |||
| М | |||
| Nieuwe ontwikkelingen bij de oogstverzamelaar-Fruitteelt, 1980 70, № 3 | |||
| p | |||
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
