Изобретение относится к строительному и дорожному машиностроению и может быть использовано, например, в землеройных машинах.
Целью изобретения является повьш1е- ние производительности и надежности работы машины при рытье траншей шириной больше, ширины рабочего органа.
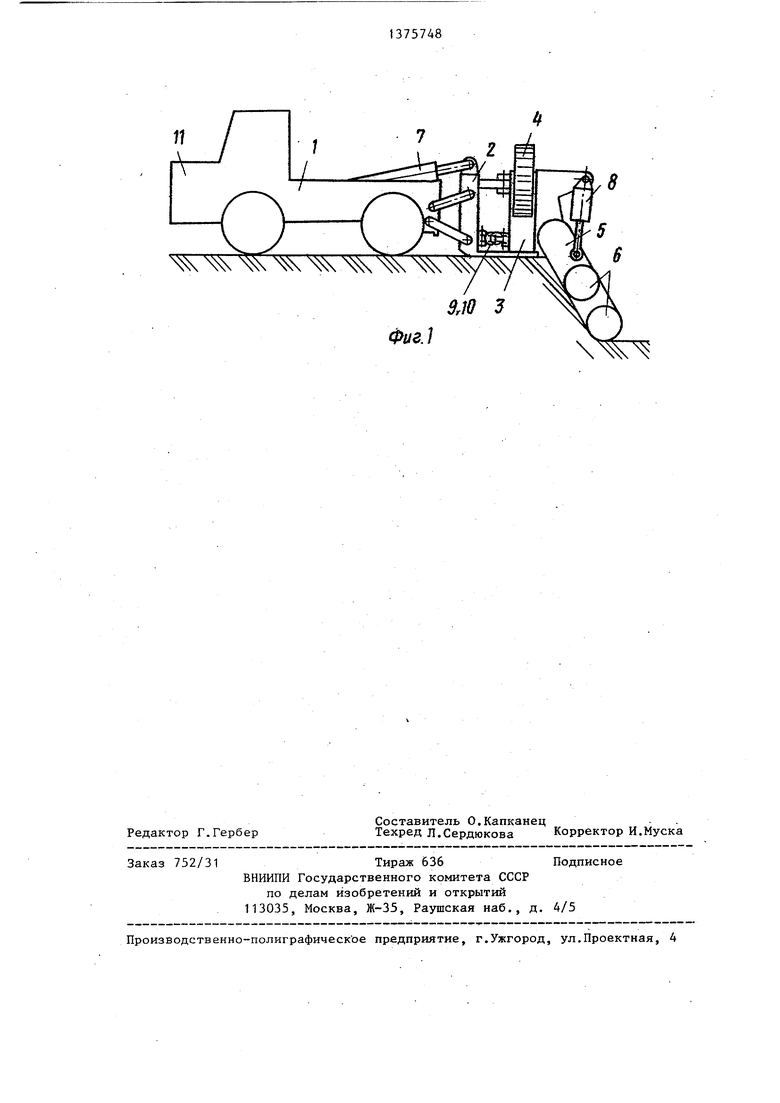
На фиг. 1 представлена машина для рытья траншей на фиг. 2 - принципиальная схема машины.
Машина 1 для рытья траншей (фиг.1) имеет укрепленную на ней промежуточную раму 2, поворотную раму 3 с метателем 4 грунта и цепным рабочим органом 5 с фрезами 7, гидроцилиндр 7 для перевода рамы из транспортного положения в рабочее, гидроцилиндр -8 заглубления рабочего органа, гидроцилиндры 9 и 10 качания рабочего органа. Приводной двигатель 11 (фиг, 2) через кинематическую цепь 12 и раздаточные редукторы 13 и 14 соединен с насосом 15, метателем 4 и рабочим органом 5 с фрезами 6. Гидропривод, кроме насоса 15, содержит гидробак 16, предохранительный клдпан 17,трех- позициопные четырехлинейные распределители 18 и 19 механизмов заглубления и качания рабочего орган I, установленные параллельно в гидролинии четырехлинейный распределитель 18 - поршневая полость гидроцилиндра 8 заглубления дроссель 20 и двухПо- зиционный двухлинейный распределитель 21, гидромеханизмы 22. Гидроцилиндр 8 заглубления снабжен линейкой 23.
Система управления содержит флажок 24, установленньй на линейке 23 и взаимодействующий с конечным выключателем 25, связанным с органом 26 управления гидрораспределителя 18 через последовательно включенные логические элементы И-НЕ 27 и ЗАЛРЕТ 28, и датчики 29 и 30 давления. Датчик 29 давления подключен в поршневую полость гидроцилиндра 8 заглубления и связан с вторым входом логического элемента И-НЕ 27. Флажки 31 и 32 взаимодействуют с конечными выключателями 33 и 34, связанными с органами 35 и 36 управления распределителя 19 Рабочие полости гидроцилиндров 9 и 10 качания череЗ обратные клапаны 37 и 38 соединены с датчиком 30 давления, вход которого через дроссель 39 соединен с гидробаком 16. Выход
5
0
5
0
5
0
5
0
5
датчика 30 давления связан с органом 40 управления распределителя 21, с органом 41 управления распределителя 18 и вторым входом логического элемента ЗАПРЕТ 28. Полости гидроцилиндра 8 заглубления соединены между собой через последовательно установленные дроссель 42 и двухпозиционный трехлинейный распределитель 43, орган 44 управления которого связан с выходом датчика.29 давления через логический элемент ЗАПРЕТ 45. На второй вход этого элемента воздействует сигнал с датчика 30 давления.
Машина работает следующим образом.
Устанавливают флажок 24 относительно линейки 23 на заданную глубину разрабатываемой траншеи, флажки 31 и 32 - на заданную ширину разрабатываемой траншеи, включают приводы рабочего органа, метателя, механизмы заглубления и качания рабочего органа 5 с фрезами 6. Врашающий момент от приводного двигателя 11 через кинематическую цепь 12 и раздаточные редукторы 13 и 14 .подводится к метателю 4, рабочему органу 5 и насосу 15. Насос подает рабочую жидкость из гидробака 16 через распределитель 18, включенный в правую по схеме позицию, в штоковую Полость гидроцилиндра 8, а поршневая полость этого цилиндра через установленньй в правую по схе-, ме позицию распределитель 21 и распределитель 18 соединена с п-здроба- ком, в результате чего осуществляется заглубление рабочего органа. Одновременно включается, например, в верхнюю (фиг. 2) позицию распределитель 19 и рабочая жидкость от насоса 15 поступает в штоковую полость гидроцилиндра 10 и поршневую полость гидроцилиндра 9, поворачивая- рабочий орган. Флажок 31 воздействует на ко- нечный выключатель 33, который снимает сигнал с органа 35 управления и подает его на орган 36 управления. Распределитель 19 переключается в нижнюю по схеме позицию, рабочий орган поворачивается в другую сторону, пока флажок 32 не воздействует на конечньш выключатель 34, и т.д. Таким образом, происходит заглубление и возвратно-поворотное движение рабочего органа, пока флажок 24 не нажмет конечный выключатель 25. Сигнал X;, 1 поступает на вход логического элемента И-НЕ 27. Так как на втором
его входе был сигнал X „ О, то на его выходе появится сигнал Y , О, а на выходе логического элемента ЗАПРЕТ 28 - сигнал У2 О, Под действием пружины распределитель 18 установится в среднее положение, и заглубление рабочего органа заканчивается. Включают привод передвижения маши75748
бочего органа 5
ление, например,
то повышается дав- в поршневой полости цилиндра 9 и штоковой полости цилиндра 10 качания, замыкаются контакты датчика 30 давления, сигнал Х} 1 поступает на органы 40 и 41 Управления и вход элементов ЗАПРЕТ 28 и 45, распределители 21 и 18 переключают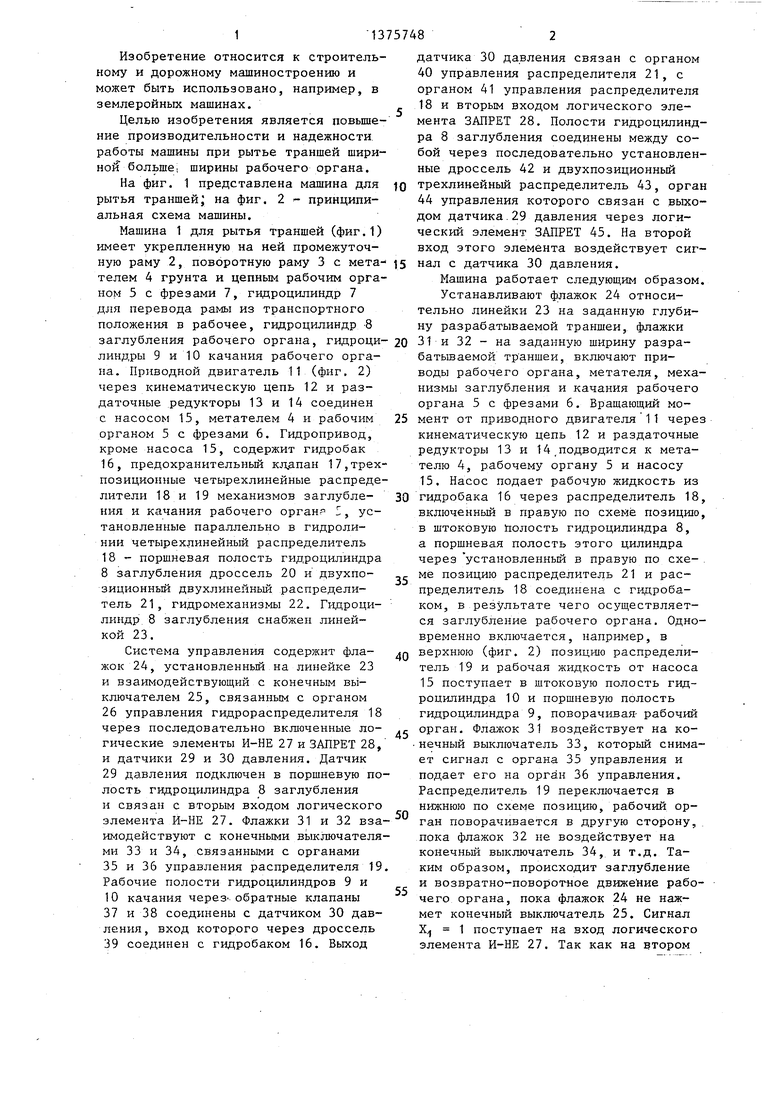
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для рытья траншей | 1985 |
|
SU1257137A1 |
| Машина для рытья траншей | 1983 |
|
SU1198169A1 |
| Гидропривод шагового толкателя | 1987 |
|
SU1523746A1 |
| Гидравлический привод автомобильного подъемника | 1991 |
|
SU1789787A1 |
| Гидропривод землеройной машины | 1989 |
|
SU1649048A1 |
| Рулевое управление транспортного средства | 1988 |
|
SU1558757A1 |
| Электрогидравлическая система управления выносными опорами самоходной площадки обслуживания высокорасположенных объектов | 1991 |
|
SU1837125A1 |
| Пневмогидравлический привод | 1983 |
|
SU1114821A2 |
| Гидропривод кабелеукладочной машины | 1989 |
|
SU1640307A1 |
| Гидросистема грузоподъемного крана | 1991 |
|
SU1765542A1 |
Изобретение относится к строительному и дорожному машиностроению. Цель - повьшение производительности и надежности работы машины при рытье траншей шириной, большей ширины ра- 0очего органа. Для этого система равления гидроприводом органа 5 включает дополнительно второй датчик 30 давления, двухлинейный распределитель (Р) 21, дроссели 20 и 39, обратные клапаны 37 и 38 и логические элементы ЗАПРЕТ 28 и 45. Датчик 30 подключен через клапаны 37 и 38 к штоковым полостям грщроцилиндров (ГЦ) 9 и 10 качания,а через дроссель 39 - к баку 1 6. Дроссель 20 и Р21 установлены в гидролинию четырехлинейныйР 18 - поршневая полость ГЦ8 заглубления рабочего органа. Б поршневую полость ГЦ8 подключен датчик 29 давления. Посредством соответствующе го переключения Р 1 8 ,1 9 и 43 при подаче сигнала с одного или одновременно с двух датчиков 29иЗОс помощью логических элементов ЗАПРЕТ 28 и45 иИ-НЕ 27 машина может в автоматическом цикле обходить препятствия в случае их воздействия на цепь и на фрезы 6 либо на фрезы 6 и на цепь рабочего органа 5 одновременно. 2 ил. 5 ж, 1/ / i (Л 25 С СП 00 Фиг.г
ны и начинают разработку траншеи. Me-JQ ся в левые (фиг. 2) позиции, а сигтатель 4 эвакуирует подаваемый рабочим органом грунт. Если по пути разработки попалось труднопреодолимое, препятствие, воздействующее на цепь рабочего органа 5, давление в поршне- вой полости гидроцилиндра 8 за.глубле- ния возрастает, замыкаются контакты датчика 29 давления, сигнал Хд 1, а X о О, в результате чего сигнал
нал на органе 44 управления Y, 0. Рабочая жидкость от насоса 15 поступает в штоковую полость цилиндра 8 заглубления, а из поршневой полости через дроссель 20 жидкость уходит на слив, благодаря чему рабочий орган медленно поднимается, осуществляя одновременно частичную разработку труднопреодолимого препятствия боковыми фрезами 6. Так как при этом сигнал X . О, флажок 24 освобождает конечный выключатель 25 X 2 О, то сигнал на выходе элемен а 27 Y 1. Очевидно так как сигнал X 1, то Y г, О и включения органа 26 управления распределителя 18 не произойдет. Как только давление в поршневой полости цилиндра 9 и штоковой полости цилиндра 10 уменьшится, обратный клапан 38 закроется и часть жидкости из органа управления датчика 30 давления уйдет через дроссель 39 на слив, благодаря чему контакты датчика разомкнутся. Сигнал X. .0 поступит на органы 40 и 41 управления распределителей 18 и 21, а также на вход элемента ЗАПРЕТ 28. Так как при этом сигналы Х., X g О, то Y 0, а так ка;к Х 0, то Y 1. Распределители 18 и 21 переключаются в правые (фиг. 2) позиции. Благодаря этому будет осуществляться заглубление рабочего органа, пока флажок 24 не воздействует на конечный выключатель 25
на выходе элемента ЗАПРЕТ 45 Y , 1 и орган 44 управления переключает распределитель 43 в левую по схеме позицию. Рабочая жидкость из поршневой полости гидроцилиндра 8 через дроссель 42 и распределитель 43 поступает в штоковую полость этого гидроцилиндра.. Так как эти полости имеют разные эффективные площади, избыток рабочей жидкости от распределителя 43 поступает также в гидробак 16. Установка в систему дросселя 42 обеспечивает плавный обход и частичную разработку труднопреодолимого препятствия при давлении в поршневой полости гидроцилиндра, близком к максимально допустимому. Как только давление в поршневой полости гидроцилиндра 8 уменьшится, контакты датчика 29 давления разомкнутся и на обоих входах элемента И-НЕ 27 появятся сигналы
В рЕзультате этого сиг- выходе Y . 1 при сигнале с выхода элемента .ЗАПРЕТ 28
20
25
30
35
х, .
нал на его
X 2 О
будет подан сигнал
40
2
1, орган 26
нал на органе 44 управления Y, 0. Рабочая жидкость от насоса 15 поступает в штоковую полость цилиндра 8 заглубления, а из поршневой полости через дроссель 20 жидкость уходит на слив, благодаря чему рабочий орган медленно поднимается, осуществляя одновременно частичную разработку труднопреодолимого препятствия боковыми фрезами 6. Так как при этом сигнал X . О, флажок 24 освобождает конечный выключатель 25 X 2 О, то сигнал на выходе элемен а 27 Y 1. Очевидно так как сигнал X 1, то Y г, О и включения органа 26 управления распределителя 18 не произойдет. Как только давление в поршневой полости цилиндра 9 и штоковой полости цилиндра 10 уменьшится, обратный клапан 38 закроется и часть жидкости из органа управления датчика 30 давления уйдет через дроссель 39 на слив, благодаря чему контакты датчика разомкнутся. Сигнал X. .0 поступит на органы 40 и 41 управления распределителей 18 и 21, а также на вход элемента ЗАПРЕТ 28. Так как при этом сигналы Х., X g О, то Y 0, а так ка;к Х 0, то Y 1. Распределители 18 и 21 переключаются в правые (фиг. 2) позиции. Благодаря этому будет осуществляться заглубление рабочего органа, пока флажок 24 не воздействует на конечный выключатель 25
управления переключит распределитель . и продолжится разработка полного про18 в правую по схеме позицию. Одновременно сигнал Yg 1 поступит на вход органа 44 управления и распределитель 43 переключится в левую по схеме позицию. Рабочая жидкость от насоса 15 поступит в поршневую полость цилиндра 8, рабочий орган начнет заглубляться, пока флажок 24 не нажмет конечный выключатель 25 и распределитель 18 под действием пружин переключится в среднее положение.
Если по пути разработки попалось труднопреодолимое препятствие, воздействующее на торцовые фрезы 6 ра50
филя траншеи на заданную ширину.
Если по пути разработки попалось труднопреодолимое препятствие, воздействующее одновременно на цепь и торцовые фрезы 6 рабочего органа 5, то замыкаются контакты датчиков 29 и 30 давления, сигналы Х2 Х„ 1, сигналы Y ., Yg Y.J 0 и машина будет работать так же, как в случае воздействия труднопреодолимого препятствия только на фрезы. Здесь сигнал на вхо- . де органа 44 управления Y О, распределитель 43 под действием пружины останется в левой (фиг. 2) позиции.
ся в левые (фиг. 2) позиции, а сиг
нал на органе 44 управления Y, 0. Рабочая жидкость от насоса 15 поступает в штоковую полость цилиндра 8 заглубления, а из поршневой полости через дроссель 20 жидкость уходит на слив, благодаря чему рабочий орган медленно поднимается, осуществляя одновременно частичную разработку труднопреодолимого препятствия боковыми фрезами 6. Так как при этом сигнал X . О, флажок 24 освобождает конечный выключатель 25 X 2 О, то сигнал на выходе элемен а 27 Y 1. Очевидно так как сигнал X 1, то Y г, О и включения органа 26 управления распределителя 18 не произойдет. Как только давление в поршневой полости цилиндра 9 и штоковой полости цилиндра 10 уменьшится, обратный клапан 38 закроется и часть жидкости из органа управления датчика 30 давления уйдет через дроссель 39 на слив, благодаря чему контакты датчика разомкнутся. Сигнал X. .0 поступит на органы 40 и 41 управления распределителей 18 и 21, а также на вход элемента ЗАПРЕТ 28. Так как при этом сигналы Х., X g О, то Y 0, а так ка;к Х 0, то Y 1. Распределители 18 и 21 переключаются в правые (фиг. 2) позиции. Благодаря этому будет осуществляться заглубление рабочего органа, пока флажок 24 не воздействует на конечный выключатель 25
. и продолжится разработка полного про50
филя траншеи на заданную ширину.
Если по пути разработки попалось труднопреодолимое препятствие, воздействующее одновременно на цепь и торцовые фрезы 6 рабочего органа 5, то замыкаются контакты датчиков 29 и 30 давления, сигналы Х2 Х„ 1, сигналы Y ., Yg Y.J 0 и машина будет работать так же, как в случае воздействия труднопреодолимого препятствия только на фрезы. Здесь сигнал на вхо- . де органа 44 управления Y О, распределитель 43 под действием пружины останется в левой (фиг. 2) позиции.
513
благодаря чему гидроцилиндр 8 заглубления будет работать в том же режиме что и ранее.
Таким образом, предлагаемая машина при рытье траншей шириной, большей ширины рабочего органа позволяет в автоматическом цикле обходить препятствия в случае воздействия их на цепь, на фрезы, либо на цепь и фрезы рабочего органа одновременно. Это снижает утомляемость водителя и повышает надежность работы машины. Здесь при рытье траншей шириной больше ши
рины рабочего органа не требуется за- раллельно установлены первый дополнимены срезных штифтов, нет вызванных этим простоев, что дает возможность повысить производительность машины.
Формула изобретения20
Машина для рытья траншей, включающая прицепную раму с метателем и цепным рабочим органом, механический привод рабочего органа, гидропривод 25 с насосом и предохранительным клапаном, напорными и сливными гидролиниями, гидроцилиндры качания рабочего органа, гидравлически соединенные через второй четырехлинейный распределитель с наливной и сливной гидролиниями,, гидроцилиндр заглубления, к поршневой полости которого подключены дроссель и датчик давления, а што- ковая полость подключена к трехлинейному распределителю, при этом концевой выключатель, установленный в што30
35
тельный дроссель и двухлинейный распределитель, штоко вые полости гидроцилиндров качания через два обратных клапана соединены с вторым датчиком давления и через второй дополнительный дроссель - с гидробаком, а выход датчика давления соединен с вторым органом управления первого четырехлинейного распределителя гидроцилиндра заглубления с органом управления двухлинейного распределителя гидроцилиндра заглубления, вторыми входами первого и второго логических элементов ЗАПРЕТ, при этом выход логического элемента И-НЕ подключен к пер--- вому входу первого логического элемента ЗАПРЕТ, а датчик давления соединен с первым входом второго логического элемента ЗАПРЕТ, выход первого логического элемента ЗАПРЕТ соединен с первым органом управления первого чётырехлинейного распределителя, а выход второго логического элемента ЗАПРЕТ соединен с органом управления трехлинейного распределителя.
динены через логический элемент И-НЕ с первым органом управления первого четырехлинейного распределителя,
отличающаяся тем, что, с целью повышения производительности машины при рытье траншей шириной больше ширины рабочего органа, в систему управления гидроприводом рабочего органа машины включены дополнительно второй датчик давления, двухлинейный распределитель, два дополнительных дро.сселя, два обратных клапана и два логических элемента ЗАЛРЕТ, причем в гидролинию первый четырехлинейный распределитель - поршневая полость гидроцилиндра заглубления па
тельный дроссель и двухлинейный распределитель, штоко вые полости гидроцилиндров качания через два обратных клапана соединены с вторым датчиком давления и через второй дополнительный дроссель - с гидробаком, а выход датчика давления соединен с вторым органом управления первого четырехлинейного распределителя гидроцилиндра заглубления с органом управления двухлинейного распределителя гидроцилиндра заглубления, вторыми входами первого и второго логических элементов ЗАПРЕТ, при этом выход логического элемента И-НЕ подключен к пер--- вому входу первого логического элемента ЗАПРЕТ, а датчик давления соединен с первым входом второго логического элемента ЗАПРЕТ, выход первого логического элемента ЗАПРЕТ соединен с первым органом управления первого чётырехлинейного распределителя, а выход второго логического элемента ЗАПРЕТ соединен с органом управления трехлинейного распределителя.
N$ yW
/
yW
/
Фиг. 1
Ж
| Машина для рытья траншей | 1985 |
|
SU1257137A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 755966, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
