Изобретение относится к области гид- рэавтоматики и может быть использовано в конструкциях грузоподъемных машин.
Цель изобретения - повышение безопасности и технологичности работы.
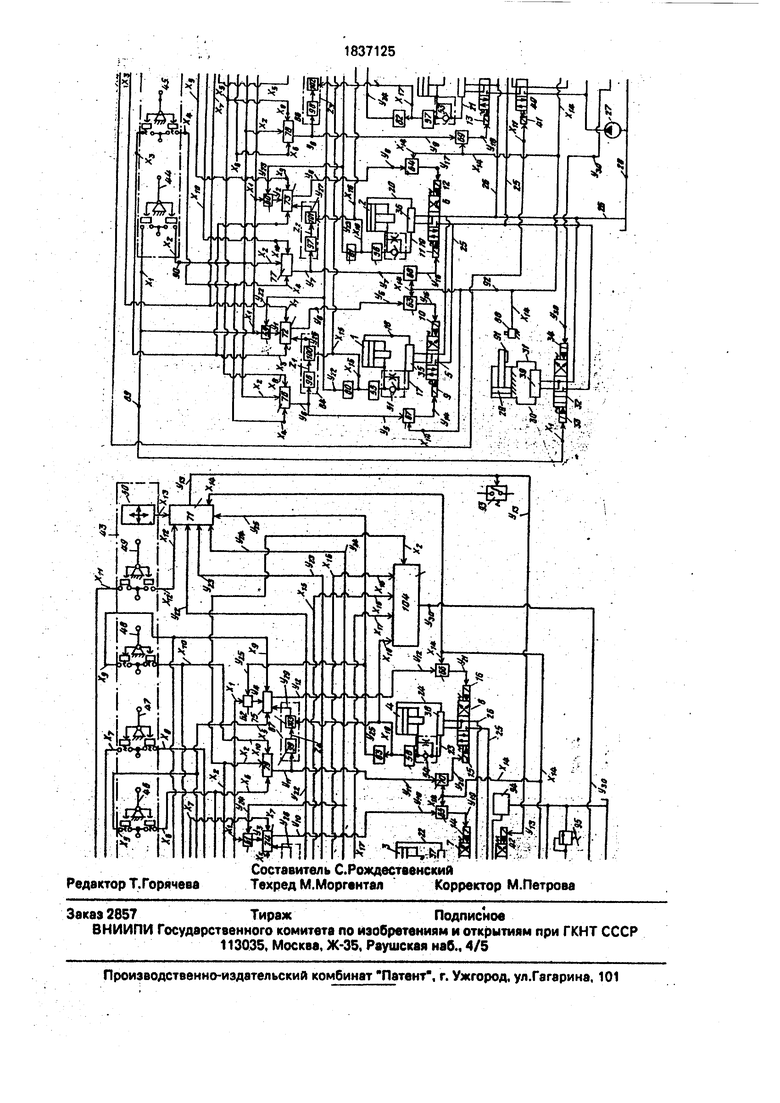
На чертеже изображена схема электрогидравлической системы управления выносными опорами самоходной площадки обслуживания высокорасположенных объектов.
Система содержит гидроцилиндры 1, 2, 3, 4 выдвижения и убирания опор (не изображены), связанные с управляемыми гид- р распределителями 5, 6, 7, 8, имеющими входы 9,10,11,12,13,14,15,16управления выдвижением и убиранием опор, подключенные гидролиниями 25, 26 к гидробаку 28 и через управляемый гидрораспределитель
40 вида работ-к напорной гидролинии (не обозначена) насоса 27. Гидроцилиндр 29 блокировки рессор {не изображены) гидролиниями 30, 31 соединен с управляемым гидрораспределителем 32, имеющим входы 33,34 управления. В гидролиниях 17,18,19, 20, 21, 22, 23, 24, 31. 32 установлены гидрозамки 35, 36, 37, 38, 39. Гидрораспределитель 40 имеет входы 41, 42 управления.
Пульт 43 управления содержит переключатель 44 блокировки рессор, переключатели 45, 46, 47, 48 опор ереключатель 49 вида работ, датчик50 уровня и выключатель 93 питания переключателей 45-48.
Гидроцилиндры 5, 6. 7, 8 снабжены дросселями (не обозначены), шунтированными обратными клапанами 51, 52, 53, 54 и реле 55, 56, 57, 58 давления. Система вклю00СА V4
ГО (Л
чает двухвходовые логические элементы И 59, 60. 61, 62, 63, 64. 65, 66. 67, 68, 69, 70, семивходовый логический элемент И 71, логические элементы НЕ 80,81,82,83, логические элементы Запрет 84, 85, 86, 87, конечный выключатель 88 гидроцилиндра 29. трехвходовые логические элементы ИЛИ 76, 77, 78, 79, четырехвходовые логические элементы ИЛИ 72,73.74,75 и пятивходовый логический элемент И 104. Штоки и полости гидроцилиндров на чертеже не обозначены.
Линия 89 связи переключателя 44 соединена с входом 33 управления и через логические элементы И 59,...62, четырехвходовые логические элементы ИЛИ 72 ...75, логические элементы И 63...66 связана с входами 10,12,14,16 управления выдвижением опор, а линия 90 связи переключателя 44 соединена с входом 34 управления и через трехвходовые логические элементы ИЛИ 76 ...79 и логические элементы И 6770 связана с входами 9,11,13,15
управления убирания опор. Каждый из переключателей 45...48 связан с одним из трехвходовых 76...79 и одним их четырех- входовых 72...75 логических элементов ИЛИ. Реле 55-58 давления через логические элементы ЗАПРЕТ 84.„87 связан с четвертыми входами логических элементов ИЛИ 72.„75, а через логические элементы НЕ 80...83 и семивходовый логический элемент И 71 связаны с входом 42 управления гидрораспределителем 40 вида работ.
Четырехвходовые логические элементы ИЛИ 72...75 связаны со вторыми входами логических элементов ЗАПРЕТ 84.„87. Конечный выключатель 86 взаимодействует с гидроцилиндром 29 блокировки рессор посредством флажка 91, закрепленного на его штоке (не обозначен) и связан линией 92 со вторыми входами логических элементов И 63...70 и семивходовым логическим элементом И 71, один вход которого связан с датчиком 50 уровня. Выходы логических элементов НЕ 80...83 связаны со вторыми входами логических элементов И 59...62. Выход семивходового логического элемента И 71 связан с выключателем 93 питания переключателей 45...48. Система содержит блок 94 управления гидромеханизмами поворота и подъема самоходной площадки об- служивания (не изображено) и предохранительный клапан 95.
Элементы ЗАПРЕТ 84...87 могут включать логические элементы НЕ 96, 97, 98, 99, логические элементы И 100,101, 102,103.
В линию 90 связи переключателя 44 с входом 34 управления 34 может быть включен пятивходовый логический элемент И
0
5
104, входы которого связаны с реле 55...58 давления.
На выходах переключателей 44.„49 датчика 50, конечного выключателя 88, реле
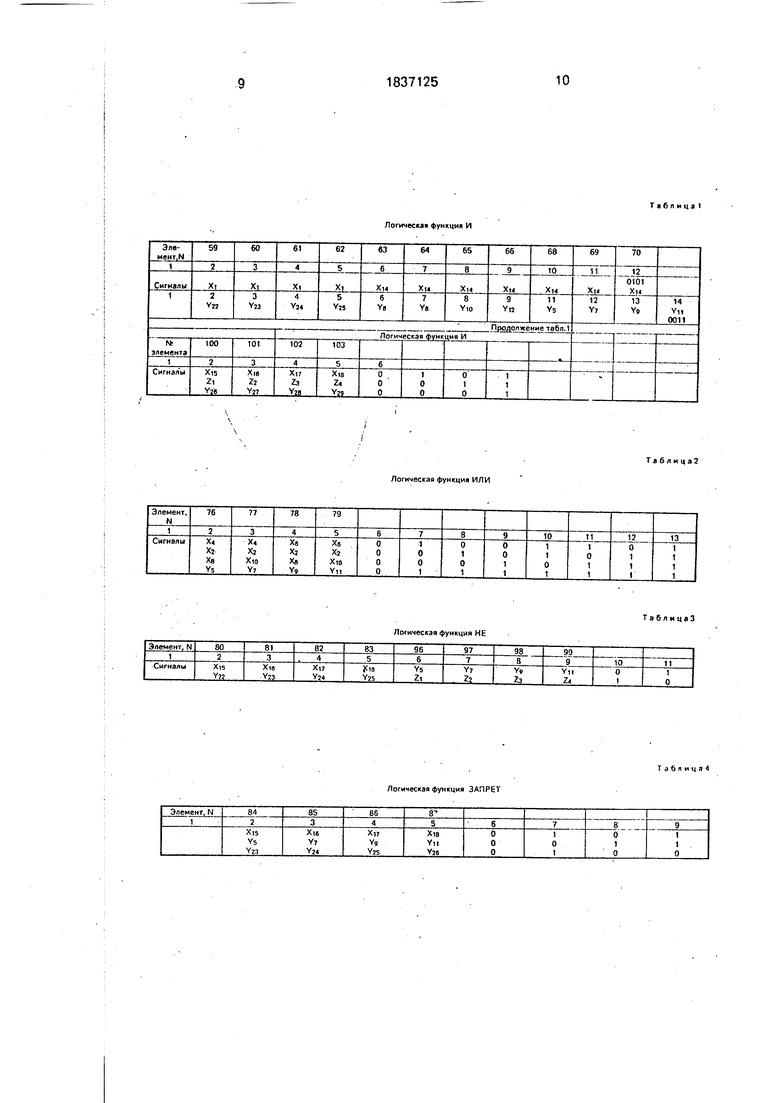
55...58 обозначены сигналы XI...XIB, на выходе логических элементов И 59.„62, ИЛИ 76, 72, 77. 73, 78, 74. 79. 75, И 71, 67, 63, 68, 64,69, 65,70. 66, НЕ 80...83, ЗАПРЕТ В4...87, И 104 - сигналы Yi... Y3o- На выходе логических элементов НЕ 96.„99 - сигналы Zi...Z4. Сигналы Xi...Xi8, Yi...Y30, Zi...Z4 могут принимать два уровня значений 0 и 1.
В табл. 1-4 приведены виды состояний логических элементов И, ИЛИ, НЕ, ЗАПРЕТ. На выходах логических элементов И 71 и 104 выходные сигналы равны 1 лишь в случае, когда все входные сигналы их равны единице. Вор всех остальных случаях сигна- лы на их выходе равны нулю.
На выходе логических элементов ИЛИ 72...75 сигналы будут равны нулю при всех входных сигналах, равных нулю. Во всех остальных случаях сигналы на их выходах будут равны единице.
Электрогидравлическая система управления выносными опорами самоходной пло- . щадки обслуживания высокорасположенных объектов работает следующим образом.
п После установки самоходной площадки обслуживания на месте работы оператор включает питание электрической, гидравлической части системы и осуществляет выпуск опор. Для этого оператор поворачивает переключатель 49 против часовой стрелки. Сигнал поступает на вход 41 управления, который переключает гидрораспределитель 40 в левую позицию. Рабочая жидкость из гидробака 28 насосом 27 по
п гидролинии 25 подается к гидрораспреде0 лителям 5...8,32.
Далее оператор поворачивает против часовой стрелки переключатель 44 пульта 43. Сигнал no линии 89 подводится к логическим элементам И 59,...,62 и входу 33 управления гидрораспределителя 32 блокировки рессор. Гидрораспределитель 32 переключается в левую позицию. Рабочая жидкость по гидролинии 30 подводится в поршневую полость гидроцилиндра 29. Шток гидроцилиндра 29 выдвигается, осуществляя блокировку рессор. Одновременно, так как сигналы на выходах реле 55..58 Xis-Xie- Xir XiaH), сигналы на выходе логических элементов НЕ 80...83
Y22 Y23mY24 Y25™1 (см. табл.3) подводятся ко вторым входам логических элементов И 59...62. На выходе последних сигналы Y1-Y2-Y3 Y4 1 (см. табл.1). Эти сигналы поступают на входы логических элементов ИЛИ 72„.75, в результате чего на их выходах
появляются сигналы , поступающие к логическим элементам И 63...66. На их вторых входах сигналы лишь после того, как флажок 81, закреплен- к ый на штоке гидроцилиндра 29, нажмет на конечный выключатель 88, что произойдет только после блокировки рессор. Благодаря этому осуществляется в автоматическом L икле последовательная работа блокировки рессор и перемещения опор.
После блокировки рессор сигналы на е ыходах логических элементов И 63...66 (см. табл.1) Yi5 Yi7™Yi9arY2i 1 поступают к вхо- 10, 12, 14, 16 управления гидрораспре- ;елителей 5...8. Гидрораспределители 5-8 г ереключаются в правые позиции. Рабочая жидкость под давлением по гидролиниям 25, 18, 20, 22, 24 подается в поршневые голости гидроцилиндров 1...4. Осуществляется выдвижение опор. Одновременно ра- Еочая жидкость из штоковых полостей мдроцилиндров 1...4 по гидролиниям 17, 19,21,23,26 отводится в гидробак 28. Однако, так как в гидролиниях. 17, 19, 21, 23 установлены дроссели 51...54, давление пе- ред ними повышается, контакты реле 54..58 замыкаются и сигналы гоступают на входы элемента ЗАПРЕТ {4...87. Так как при этом сигналы на их вто- р ых входах . сигналы на их выходах Y26-Y27 Y28 Y29 1 (см. таблицу 4). J ти сигналы поступают на четвертые входы четырехвходовых логических элементов .ИЛИ 72...75. Благодаря этому на выходах этих элементов поддерживаются сигналы 6-Y8± Yio Yi2 1 независимо от значения сигналов Yi, Y2. Ya, Y4, которые становятся равными нулю после замыкания контактов реле 55...58, так как сигналы N (см. табл.3). Выдвижение о пор продолжается независимо от значения с лгнала Xi и положения переключателя 44 до т jx пор, пока все опоры не упрутся в препятст- вле. Движение штоков гидроцилиндров 1-4 замедлится, противодавление в их штоковых полостях понизится, контакты реле 55...58 ра- зэмкнутся. Сигналы , сигна- ribi (см. таблицу 4). Сигналы на выходах логических элементов ИЛИ Т2...75 V , сигналы (( м. таблицу 1). Гидрораспределители S...8 воз- вэащаются в средние позиции. Гидроцилиндры 1...4 остановятся, дроссели 51...54 обеспечивают одновременное движение гид- роцилиндров 1-4, выполняя функции делите- лей потока.
После того, как гидроцилиндры 1-4 выдвинуты до упора в грунт, оператор по показанию датчика 50 уровня осуществляет при помощи переключателей 45...48 корректировку положения самоходной площадки обслуживания так, чтобы она была строго горизонтальна,Например,при необходимости осуществить дальнейший подъем передних опор, оператор поворачивает против часовой стрелки переключатель 45. Сигнал подводится к логическим элементам ИЛИ 72 и 73. Сигналы поступают к логическим элементам И 63, 64. Откуда сигналы (см. таблицу 1, ) подводятся к входам 10, 12 управления гидрораспределителей 5 и 6. Гидрораспределители 5, 6 переключаются в правые позиции и осуществляется подъем передней части площадки. Сигналы на выходе реле 55...S8 Xi5 Xi6 0, так как опоры при этом находятся в контакте с грунтом.
Для опускания передней части площадки переключатель 45 поворачивают по часовой стрелке. Сигнал подводится к логическим элементам ИЛИ 76 и 77 сигналы (см. табл.2) подводятся ко входам логических элементов И 67, 68. Сигналы (см. табл.1) поступают к входам 9, 11 управления гидрораспределителей 5, 6. Аналогично при воздействии оператора на переключатели 46, 47, 48 осуществляется подъем и опускание задней, правой, левой части площадки.
После установки строго горизонтального положения площадки сигнал на выходе уровня 50 подается на вход логического элемента И 71. Так как движение гидроцилиндров 1-4 прекращено, то сигналы на выходах реле 55...58 Xi5 Xi6 Xi7 Xi8riO. Благодаря этому на выходах логических элементов НЕ 80...83 вырабатываются сигналы (см. табл.3), которые подаются на входы логического элемента И 71.
Оператор поворачивает переключатель 49 по часовой стрелке. Сигнал подается на вход логического элемента 71. Сигнал на его выходе переключает гидрораспределитель 40 вида работ в правую позицию. Рабочая жидкость от насоса 27 поступает к блоку 94 подъема и поворота самоходной площадки обслуживания. Гидрозамки 35...39 обеспечивают стабильное положение гидроцилиндров 1...4, 29.
После окончания работы всех гидромеханизмов площадки и возвращения их в исходное положение оператор, поворачивая переключатель 49 против часовой стрелки, отключает эти гидромеханизмы и включает гидромеханизмы выносных опор. Сигнал Xn-l переключает гидрораспределитель 40 в левую позицию. Далее оператор поворачивает переключатель 49 по часовой стрелке. Сигналы X2 X5 Y7 Y9 Yii-1 (см, табл.2), сигналы Yi4 -Yi6-Yi8 Y20 1 (см. табл.1) под
водятся к входам 9, 11, 13, 15 управления ино числу опор, логическими элементами гидрораспределители 5...8 переключаются Запрет, число которых равно числу опор, в левые позиции. Осуществляется убираниеи конечным выключателем положения гид- опор в транспортное положение.. роцилиндра блокировки, а также ПОДКЛЮЕТ конце хода гидроцилиндров 1...4 дав-5 ценными к гидроцилиндрам опор ление в их штоковых полостях возрастает,дросселями, шунтированными обратными замыкаются контакты реле 55...59, Сигналыклапанами и подключенными к выходам по- Xis Xie-Xir-Xis-l поступают на входы ло-следних реле давления, при этом, одна ли- гического элемента И 104. Так как сигналния связи пульта управления соединена с ,, то вход 34 управления переключает10 первым входом управления гидрораспреде- гидрораспределитель 32 в правую позицию,лителя блокировки и через первые двухвхо- обеспечивая разблокировку рессор. Само-довые элементы И, четырехвходовые ходная площадка обслуживания готова к пе-элементы ИЛИ и вторые двухвходовые эле- реезду на новое место работы.менты И связана с входами управления вы- Обратные клапаны 51...54 обеспечива-15 движением гидрораспределителей опор, а ют убирание опор в транспортное положе-другая линия связи соединена с вторым вхо- ние с максимальной скоростью. Клапан 95дом управления гидрораспределителя бло- защищает систему от перегрузки.кировки, и через трехвходовые элементы Формула изобретенияИЛИ и третьи двухвходовые элементы И 1. Электрогидравлическая система уп-20 связана с входом управления уборкой гид- равления выносными опорами самоходнойроцилиндров опор, каждый переключатель площадки обслуживания высокорасполо-управления гидрораспределителем опор жённых объектов, содержащая гидроцилин-связан с одним трехвходовым и одним четы- дры выдвижения и убирания опор,рехвходовым элементами ИЛ И, а каждое ре- связанные с управляемыми гидрораспреде-25 ле давления связано через элемент лителями, имеющими входы управления вы- Запрет с одним входом соответствующего движением и убиранием опор, ичетырехвходового элемента ИЛИ, а через подключенные к гидробаку и через управля-элементы НЕ и семивходовый элемент И емый гидрораспределитель вида работ -ксвязано с входом управления гидрораспре- напорной гидролинии насоса, гидроци-30 делителей вида работ и выключателем пита- линдр блокировки рессор с подключеннымния, причем трехвходовые элементы ИЛИ к нему управляемым перераспределите-связаны с входами элементов Запрет, колем, а также пульт управления с выключате-нечный выключатель соединен с входами лем питания и переключателями сигналов ввторых и третьих двухвходовыхэлементов И линиях связи 6 входами управления гидро-35 и с семивходовым элементом И, другой вход распределителей и датчик уровня, о т л и ч а-которого связан с датчиком уровня, а выхо- ю щ а я с я тем, что, с целью повышенияды элементов НЕ подключены к вторым вхо- безопасности и технологичности работы, онадам первых двухвходовых элементов И. снабжена семивходовым логическим элементов И, двухвходовым и логическими эле-40 2. Система по п. 1,отличающаяся ментами И, число которых равно числу опор,тем, что она снабжена пятивходовым логи- трехвходовыми логическими элементамическим элементом И, четыре входа которого ИЛИ, число которых равно числу опор, четы-соединены с линиями связи переключате- рехвходовыми логическими элементамилей, один вход с реле давления, а выход с ИЛИ. число которых равно числу опор, логи-45 одним входом управления гидрораспреде- ческими элементами НЕ, число которых рев-лителя вида работ.
Таблица 1
Логическая функция И
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический привод автомобильного подъемника | 1991 |
|
SU1789787A1 |
| Гидросистема грузоподъемного крана | 1991 |
|
SU1765542A1 |
| Электрогидравлическая система поворота платформы самоходного транспортного средства | 1990 |
|
SU1732011A1 |
| Машина для рытья траншей | 1986 |
|
SU1375748A1 |
| Автогидроподъемник | 1990 |
|
SU1758295A1 |
| Устройство для управления гидравлическим экскаватором | 1989 |
|
SU1778249A1 |
| САМОЗАГРУЖАЮЩИЙСЯ РАЗБРАСЫВАТЕЛЬ УДОБРЕНИЙ | 2008 |
|
RU2363133C1 |
| ФРОНТАЛЬНЫЙ ПОГРУЗЧИК С ЭНЕРГОСБЕРЕГАЮЩИМ ГИДРОПРИВОДОМ ПОГРУЗОЧНОГО ОБОРУДОВАНИЯ | 2005 |
|
RU2306389C2 |
| Гидропривод кабелеукладочной машины | 1989 |
|
SU1640307A1 |
| Гидросистема грузоподъемного крана | 1991 |
|
SU1789788A1 |
Та б л и ц а 2
Логическая функция ИЛИ
Табли цвЗ
Логическая функция НЕ
Таблица
Логическая функция ЗАПРЕТ
Ј SSiV
Составитель С.Рождественский Редактор Т.ГорячеваТехред М.МоргвнталКорректор М.Петрова
Заказ 2857ТиражПодписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., 4/5
| Зайцев Л.В | |||
| и Полосин М.Д, Автомобильные краны | |||
| М.: Высшая школа, 1987, 81, рис.65 | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Сущность изобретения: гидроцилиндры перемещения опор связаны с гидрораспределителями, подключенными к гидробаку и через управляемый гидрораспределитель вида работ к напорной гидролинии насоса | |||
| Гидроцилиндр блокировки рессор соединен с гидрораспределителем | |||
| Пульт управления имеет переключатель блокировки рессор, переключатели опор, переключатель вида работ, датчик уровня и выключатель питания переключателей | |||
| Гидроцилиндры снабжены дросселями, шунтированными обратными клапанами, а также реле давления | |||
| Система включает логические элементы И, элементы НЕ, элементы Запрет, конечный выключатель гидроцилиндра и элементы ИЛИ, Элементы Запрет могут состоять из элементов НЕ и элементов И | |||
| Входы элемента И связаны с реле давления | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ф.-лы,.1 ил, 4 табл | |||
| : У te | |||
