Изобретение относится к области машиностроения, а именно к гидроприводам грузовых гидравлических кранов и является дополнением к изобретению по заявке № 4678047/29 (051977), положительное решение от 28 июня 1990 г.
Цель - повышение надежности и расширение функциональных возможностей гидропривода грузоподъемного крана.
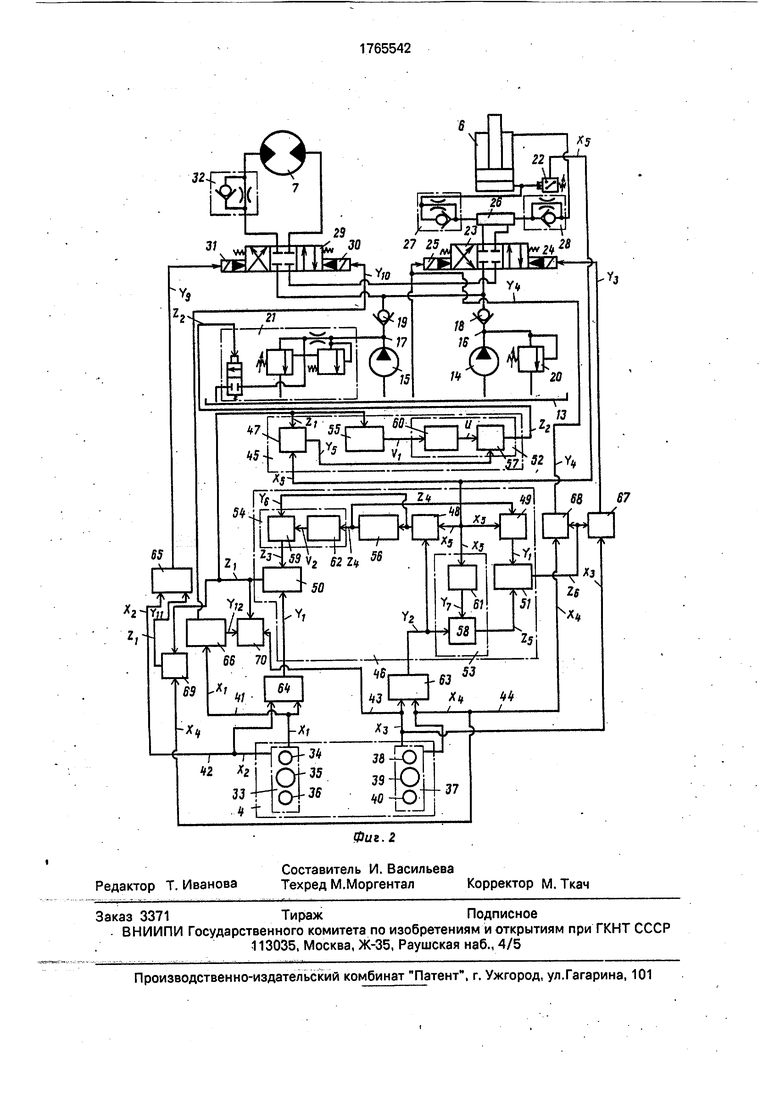
На фиг.1 представлен общий вид крана; на фиг.2 - принципиальная схема гидросистемы крана.
Грузовой гидравлический кран содержит самоходное шасси 1 (см. фиг.1), грузовую лебедку 2 и стрелу 3, пульт управления 4, установленный внутри кабины 5 самоходного шасси 1, гидроцилиндр 6 подъема стрелы, систему управления (на фиг. не . обозначена). Грузовая лебедка включает гидромотор 7, редуктор 8, барабан 9 с тросом 10. Трос при помощи системы блоков 11 связан с грузом 12.
Гидропривод крана включает гидробак 13 (см. фиг.2), насосы 14 и 15 с напорными гидролиниями 16 и 17, в которых установлены обратные клапаны 18 и 19, а также предохранительный клапан 20, автомат разгрузки 21, гидравлические механизмы подъема стрелы и груза (на чертеже не обозначены). Гидравлический механизм подъема стрелы кроме гидроцилиндра 6 включает датчик давления 22, выполненный в виде реле давления, трехпозиционный четырехлинейный гидрораспределитель 23 с органами управления 24 и 25, гидрозамок 26, дроссели с обратными клапанами 27 и 28. Гидравлический механизм подъема груза, кроме гидромотора 7 привода грузовой лебедки 2, включает трехпозиционный четырехлинейный, гидрораспределитель 29 с
XI
О СЛ
сл
4 Ю
Ю
органами управления 30 и 31, дроссель с обратным клапаном 32.
Пульт управления 4 имеет кнопочную станцию 33 управления грузовой лебедкой с кнопками 34 (Подъем груза), 35 Стоп, 36 опускание груза, а также кнопочную станцию 37 управления механизмом подъема стрелы с кнопками 38 (подъем стрелы, 39 стоп, 40 опускание стрелы. Пульт управления 4 также снабжен элементами памяти, не показанными на фиг.2. Кнопочные станции 33 и 37 линиями управления 41,42 и 43,44 связаны соответственно с органами управления 30,31 и 24,25 трехпозиционных гидрораспределителей 29,23.
Система управления краном включает логические блоки 45 и 46 которые содержат
логические элементы И 4749, ИЛ И 50,51,
ЗАПРЕТ 5254, элементы выдержки времени 55,56. Логические элементы ЗАПРЕТ
5254 состоят из логических элементов И
5759, и НЕ 6062.
Кроме того, система управления краном включает логические элементы ИЛИ 6366, И 6770.
Датчик давления 22 связан со входами логических блоков 45 и 46. Выход логического блока 46 связан с входами логического элемента И 47, и элемента выдержки времени 55, а датчик давления 22 связан со вторым входом логического элемента И 47 логического блока 45. Выходы этого логического элемента и элемента выдержки времени 55 связаны со входами логического элемента ЗАПРЕТ 52, а выход последнего связан с органом управления автомата разгрузки 21 и насоса 1 5.
Станции 33 и 37 связаны органами управления 30,31 и 24,25 механизмом подъема груза и стрелы. В линию управления 41 грузовой лебедки 2 установлен логический элемент ИЛИ 50 блока управления 46, а в линии управления подъемом стрелы установлены последовательно логические элементы ЗАПРЕТ 53 и ИЛИ 51.
Станция 37 через логический элемент И 48, элемент выдержки времени 56 и логический элемент ЗАПРЕТ 54 связана со вторым входом логического элемента ИЛИ 50.
Датчик давления 22 связан со входами логических элементов И 48,49 и ЗАПРЕТ 53. Выход элемента выдержки времени 56 связан со вторым входом логического элемента И 49, а его выход - с вторым входом логического элемента ИЛИ 51 логического блока 46.
Станции 37 и 33 управления гидромеханизмами стрелы и лебедки через логические элементы ИЛИ 63,64 связаны с логическим блоком управления 46. В линиях 43,44 управления гидромеханизмом стрелы установлены логические элементы И 67.68. Их входы связаны со вторым выходом логического блока управления 46 и станцией 37
управления гидромеханизмом стрелы.
В линиях 41 и 42 управления гидромеханизма лебедки установлены логические элементы ИЛИ 65 и 66. Их вторые входы связаны с логическими элементами И 69,70.
0 Входы логических элементов И связаны с первым выходом логического блока управления 46 и станциями 33,37 управления гид- ромеханизмами грозовой лебедки и стрелы.
5 На выходе пульта управления в линиях 41 ,...44 и датчика давления 22 вырабатываются сигналы Xi,...X5, на выходе логических элементов ИЛИ 64, И 67, 68, 47, 48, НЕ 61, И 49, ИЛИ 65, 66, И 69, 70 - сигналы
0 У12, на выходе логических элементов ИЛИ 50, И 57,59, элемента выдержки времени 56, логического элемента И 58, ИЛИ 51, сигналы Zi,...,Z6, на выходе элемента выдержки времени 55 и логического элемента НЕ 62 5 сигналы Vi,V2, на выходе логического элемента НЕ 610 - сигналы U. Сигналы Xi,...,X5,
YIYi2, Zi,...,Ze, Vi,V2, U могут принимать
два дискретных значения 0 и 1. Таблицы состояний логических элементов ИЛИ 64, 63,
0 50,51, 65,66, И 67,68, 4749, 57,...,59„69,70,
НЕ 6062, ЗАПРЕТ 5254 представлены
соответственно в таблицах 14.
Привод лебедки снабжен самотормозящейся механической передачей (червячным
5 редуктором).
Гидромотор 7 механизма подъема груза может быть выполнен нерегулируемым и регулируемым, например, регулируемым по давлению. На выходе датчика давления 22
0 вырабатывается сигнал Xs 1 при наличии груза 12, вес которого больше или равен заданному настройкой датчика давления и X 0, если вес груза меньше заданного. На выходе элементов выдержки времени 55 и
5 56 появляются сигналы Vi ZA 1 лишь через время ti и t2 выдержки времени после подачи на их вход соответственно сигналов Zi Ye 1, причем время t2 больше времени ti. В гидравлически грузоподъемном кране
0 может быть использовано устройство для
защиты от перегрузки по авт. св. №
1299954., МКИ В 66 С 23/58, Б.И. № 12,1987.
Органы управления 24,25,30,31 трехпозиционными гидрораспределителями 23,29,
5 а также автомата разгрузки 21 могут представлять собой электромагниты. Автомат разгрузки может быть выполнен в виде предохранительного клапана непрямого действия с разгрузочным гидрораспределителем (см., например, Свешников В.К., Усов А.А
Станочные гидроприводы, Машиностроение,-М., 1988, с 129, рис. 5.7). Логические элементы И, ИЛИ, НЕ, ЗАПРЕТ могут быть выполнены, например, электрическими по известным схемам (Энциклопедию современной техники Автоматизация производства и промышленная электроника, М., Сов. энциклопедия, т.2, 1963, слово Логический элемент , с. 205,...208, рис. 4...,13).
Элементы вдержки времени 55,56 могут представлять собой реле времени, элементы задержки сигнала и пр. (см. Энциклопедию современной техники. Автоматизация производства и промышленная электроника, т.З, М., Сов. энциклопедия, 1964, Реле времени, с. 248, 249, рис. 1,...4).
Гидросистема грузоподъемного крана работает следующим образом.
Устанавливают под требуемым углом стрелу 3 (фиг.1). Для этого включают насосы 14 и 15 (см. фиг.2) и для подъема стрелы нажимают кнопку 38. Подъем стрелы кнопочной станции 37 пульта управления 4. Сигнал Хз 1 по линии управления 43 поступает ко входам логических элементов И 67, ИЛИ 63. Сигнал Y2 1(см. табл.1) поступает ко входам логических элементов И 48 и 58 логического блока управления 46. Так как нагрузка на крюке отсутствует, контакты датчика давления 22 разомкнуты и сигнал Xs 0. Благодаря этому сигналы на выходах логических элементов И 48 Ye О (см. таблицу 2), НЕ 61 Y 1 (см. табл.3), И 58 Z5 - 1 (см. табл.2), ИЛИ 51 Ze 1 (см. табл.1). Так как Хз 1, то Уз - 1 (см. табл.2). Орган управления 24 переключает гидрораспределитель 23 в правую по схеме фиг.2 позицию. Шток гидроцилиндра 6 выдвигается, осуществляя подъем стрелы. При нажатии на кнопку 39 Стоп сигналы в линиях управления 43 и 44 Хз Хз 0, благодаря чему подъем стрелы прекращается.
Если требуется осуществить опускание стрелы, нажимают кнопку 40 Опускание стрелы пульта управления 4. Сигнал Х4 1 по линии управления 44 поступает ко входам логических элементов ИЛИ 63 и И 68. Так как нагрузка на крюке отсутствует, контакты датчика давления 22 разомкнуты и Xs О, У2 1 (см. табл.1). По аналогии с предыдущим Уу 1 (см. таблицу 3), Zs 1 (см. табл.2)2б 1 (см. табл.1), У4 1. Гидрораспределитель 23 переключается в левую по схеме фиг.2 позицию. Рабочая жидкость от насосов 14 и 15 поступает в штоковую полость гидроцилиндра 6, который осуществляет опускание стрелы 3) см. фиг.1).
После этого опускают ключ. Оператор нажимает кнопку 36 Опускание груза на пульте управления 4 (см. фиг.2), сигнал Х2
1 по линии управления 42 поступает к логическому элементу ИЛИ 65. Сигнал Уд 1 (см. табл.1) поступает к органу управления 31. Гидрораспределитель 29 переключает в
левую по схеме фиг.2 позицию, благодаря чему гидромотор 7 через редуктор 8 вращает барабан 9 грузовой лебедки и осуществляется опускание крюка (см. фиг.1).
Все указанные движения осуществля0 ются при скоростях, определяемых суммарной подачей насосов 14 и 15 (см. фиг.2). Действительно, так как груз на крюке отсутствует, то сигнал Xs О (контакты датчика давления 22 разомкнуты). Поэтому сигналы
5 на выходе логических элементов И 47 и 57 Vs - Za 0 (см. таблицу 2) и автомат разгрузки 21 не осуществляет разгрузку насоса 15 .
Далее закрепляют на крюке груз и на0 жимают кнопку 34 Подъем груза на пульте управления 4 (см. фиг.2).
Сигнал Xi 1 по линии управления 41 поступает к логическому элементу ИЛИ 66. С выхода этого элемента сигнал Ую 1 (см.
5 таблицу 1) поступает к органу управления 30. Гидрораспределитель 29 переключается в правую по схеме фиг.2 позицию. Рабочая жидкость от насосов 14 и 15 поступает к гидромотору 7, который начинает наматы0 вать трос на барабан 9 грузовой лебедки 2, пока не повысится давление в поршневой полости гидроцилиндра 6 стрелы 3 (см. фиг.1). Одновременно сигнадХ1 1 поступает на вход логического элемента ИЛИ 64.
5 Сигнал YI 1 поступает на вход логического элемента ИЛИ 64. Сигнал YI 1 (см. таблицу 1) поступает на вход логического элемента ИЛИ 50 логического блока 46, а сигнал Zi 1 (см. фиг.2) поступает на входы логическо0 го блока 45. &
Если вес груза (см, фиг.1), закрепленного на крюке, незначителен, то на выходе датчика давления 22 (см. фиг.2) сигнал Xs О, на выходах логических элементов И 47 и
5 57 сигналы Ys Za 0 (см. табл.2). Автомат разгрузки 21 не разгружает насос 15 от давления и подъема груза осуществляется при подводе к гидромотору 7 суммарной подачи насосов 14 и 15.
0 Если же вес груза 12 (фиг.1), таков, что замыкаются контакты датчика давления 22 (см. фиг.2), то сигнал Xs 1 поступает на второй вход логического элемента И 47, сигнал Уз 1 (см. таблицу 2) подводится ко
5 входу логического элемента И 57. Так как на выходе элемента выдержки времени 55 сигнал Vi 1 появляется лишь через время ti, после подачи сигнала Zi 1, сигналы Vi О, Y 1 (см. таблицу 3), Z2 1 (см. таблицу 2) и автомат разгрузки 21 соединяет напорную
гидролинию 17 насоса 15 с гидробаком 13 в момент наччл н- - подъема груза 12 грузовой лебедкой 2. Осуществляется плавное трогание с места и подъем груза с начальной малой скоростью. Через время ti сигнал V 1, сигналы U 0 (см. табл.3), 2.г 0 (см. табл.2). Отключается разгрузка насоса 15, благодаря чему суммарная подача насосов 14 и 15 подводится к гидромотору 7, осуществляя дальнейшее плавноеувеличениеско- рости подъема груза. Если гидромотор 7 выполнен регулируемым, например, регулируемом по давлению, то он обеспечивает дополнительное регулирование скорости движения в зависимости от веса груза, а следовательно, еще большую плавность движения.
Остановка и опускание груза обеспечивается при нажатии кнопок 35 (Стоп и 36 Опускание груза на пульте управления 4. При этом в линии управления 41 и 42 поступают соответственно сигналы Xi Ха 0 и Xi X2 1.
При выходе логического элемента ИЛИ 65сигнал соответственноУ9 ОиУд 1 (см, табл.1). Гидрораспределитель 29 под действием пружины устанавливается в среднюю позицию, а при нажатии кнопки 36 (Yg 1) - переключается в левую по схеме фиг.2 позицию.
Если вес груза 12 незначителен, то Xs 0 (контакты датчика давления 22 разомкнуты). При опускании груза сигнал Х2 1. YI Zi 1 (см. табл.1), YB 2.2 0 (см, табл.2) и опускание груза происходит со скоростью, определяемой суммарной подачей насосов 14 и 15.
Если же груз значителен, то сигнал Хз 1, сигнал на выходе элемента И 47 Y5 1 (см. табл.2). Как и ранее элемент еыдержки времени 55 задерживает передачу сигнала Vi 1 на время t. Поэтому в начальный момент Vi О, U 1 (см. табл.3), Z2 1 (см. таблицу 2) и автомат 21 разгружает насос 15. Осуществляется плавное опускание груза 12. Через время tiVi 1, U 0, и обеспечивается опускание груза с большей скоростью.
Если требуется осуществить подъем или опускание груза гидромеханизмом подъема стрелы, то нажимают кнопку Подъем стрелы 38 или Опускание стрелы 40 пульта управления 4. Если вес груза невелик, то на выходе датчика давления 22 вырабатывается сигнал Xs 0, и работа механизма подъема стрелы осуществляется также, как это было описано выше.
Если же вес груза значителен, на выходе датчика давления 22 вырабатывается сигнал Хб 1, который поступает на входы логических элементов И 48, 49 и НЕ 61 логического блока управления 46. Так как сигнал Хз 1, или Х4 1, сигнал Y2 1 (см. табл.1), то сигнал Ye 1 (см. табл.2) поступает на входы логического элемента И 59 и элемент
5 выдержки времени 56. В начальный момент сигнал ТА 0, сигнал Ye 0 (см. табл.2), V2 1 (см. табл.3), 2з 1 (см. табл.2). Сигнал Z 1 (см. табл.1) с выхода логического элемента ИЛИ 50 логического блока управления 46
0 поступает к логическим элементам И 69 и 70. Так как при этом нажата кнопка 38 Подъем стрелы или 40 Опускание стрелы, сигналы 33 1 или Х 1 сигналы Yi2 1 или YH 1(см. табл.2) поступает на входы логи5 ческих элементов ИЛИ 66 или 65, а сигналы УЮ 1 или Yg 1 (см. табл.1) Zi 1 подводятся к органам управления 30 и 31 гидрораспределителя 29 и на вход логического блока управления 45, благодаря чему осуще0 ствляется подъем или опускание круза 12 грузовой лебедкой 2 в режиме подхода к гидромотору 7 подачи сначала насоса 14, а затем суммарной подачи насосов 14 и 15, который был описан выше. Так как сигнал
5 Xs 1, сигнал Y 0 (см. табл.3) Zs О (см. табл.2), поскольку при этом сигнал YS 0, то сигнал Ze 0 (см. табл. 1) и гидрораспределитель 23 находится под действием пружин в средней по схеме фиг.2 позиции.
0 Через время t2 настройки элемента выдержки времени 56 сигнала ТА - 1 подается на входы логических элементов НЕ 62 и И 49. Сигналы V2 0 (см. табл.3) 2з 0 (см. табл.2) Zi 0 (см, табл.1). Под действием
5 пружин гидрораспределитель 29 переключается в среднюю по схеме фиг.2 позицию, а гидромотор 7 останавливается одновременно, так как сигналы Xs ZA 1, сигналы Ye 1 (см.табл,2), Ze 1 (см. табл.1). Посколь0 ку при этом Хз 1 или Х4 1, то (см. табл.2) Уз 1или У4 1 и орган управления 24 и 25 переключает гидрораспределитель 23 в правую или левую по.схеме фиг.2 позицию и осуществляется дальнейший подъем и опу5 екание груза механизмом подъема стрелы.
Дроссели с обратными клапанами
27,28,32 обеспечивают заданные скорости
движения при подъеме, опускании стрелы и
опускании груза. Гидрозамок 26 предотвра0 щает самопроизвольные опускания стрелы при нейтральном положении гидрораспределителя 23. Клапан 20 и автомат разгрузки 21 защищают систему от перегрузки. Формула изобретения
5 Гидросистема грузоподъемного крана по авт. св. № 1689673, отличающаяся тем, что, с целью повышения надежности работы и расширения функциональных возможностей станции управления гидромеханизмами, стрелы и лебедки связаны с вторым
логическим блоком управления через первые логические элементы ИЛИ, в линиях управления гидромеханизмом стрелы установлены первые логические элементы И, входы которых связаны с вторым входом второго логического блока управления и станцией управления гидромеханизмом
стрелы, а в линиях управления гидромеханизма лебедки установлены вторые логические элементы ИЛИ, вторые входы которых связаны с вторыми логическими элементами И, связанными с первым выходом второго логического блока управления и станцией управления гидромеханизмом стрелы.

| название | год | авторы | номер документа |
|---|---|---|---|
| Гидросистема грузоподъемного крана | 1991 |
|
SU1789788A1 |
| Гидравлический привод автомобильного подъемника | 1991 |
|
SU1789787A1 |
| Гидросистема грузового крана | 1989 |
|
SU1689673A1 |
| Электрогидравлическая система управления выносными опорами самоходной площадки обслуживания высокорасположенных объектов | 1991 |
|
SU1837125A1 |
| Устройство для управления гидравлическим экскаватором | 1989 |
|
SU1778249A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА СУДОВОГО КРАНА | 2003 |
|
RU2262464C2 |
| ГИДРОПРИВОД КРАНА (ВАРИАНТЫ) | 1998 |
|
RU2140388C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1997 |
|
RU2131394C1 |
| Электрогидравлическая система поворота платформы самоходного транспортного средства | 1990 |
|
SU1732011A1 |
| Устройство управления групповым гидроприводом | 1989 |
|
SU1707290A1 |
Сущность изобретения: станции управления гидромеханизмами стрелы и лебедки связаны с вторым логическим блоком управления через первые логические элементы ИЛИ. В линиях управления гидромеханизмом стрелы установлены первые логические элементы И, входы к-рых связаны с вторым входом второго логического блока управления и станцией управления гидромеханизмом стрелы. В линиях управления гидромеханизма лебедки установлены вторые логические элементы ИЛИ, вторые входы к-рых связаны с вторыми логическими элементами И, связанными с первым выходом второго логического блока управления и станцией управления гидромеханизмом стрелы. 2 ил.
Логическая функция ИЛИ
Логическая функция И
Логическая функция НЕ
Логическая функция ЗАПРЕТ
Таблица 1
Таблица 2
Таблица 3
Таблица 4
-И
Н
|H
rf
| Гидросистема грузового крана | 1989 |
|
SU1689673A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
