САд
Сл
00 О5
ffi
Изобретение относится к области машиностроения, в частности к гидравлическим приводам, и может быть использовано, например, в станкострое- НИИ и в приводах сварочных машин для перемещений исполнительных механизмов как с переменным, так и с постоянным шагом.
Цель изобретения - повьш1ение точности позиционирования и упрощение конструкции.
На чертеже представлена принципиальная схема привода.
Гидропривод шаговьрс перемещений содержит исполнительный гидроцилиндр 1, установленный в нем с образованием двух рабочих полостей 2 и 3 поршень 4 с двухсторонним штоком .5, механизм программирования, включающий гидроцилиндр 6 с поршневой и штоко- вой полостями 7 и 8 на штоке 9 которого расположены с возможностью взаимодействия с конечным выключателем 10 флажки 11, направляющий распределитель 12 выходной линии 13 и 14 которого подключены соответственно к рабочей полости 2 и штоковой полости 7, а две другие линии 15 и 16 к на--, порной и сливной магистралям 17 и 18 Штоковая полость 8 связана с рабочей полостью 3 через распределительное устройство, выполненное в виде двух- позиционного четырехлинейного распределителя 19, две линии 20 и 21 которого подключены к напорной и сливной магистралям 17 и 18, а две другие линии 22 и 23 к штоковой и рабочей полостям 8 и 3. Рабочая жидкость поступает в напорную магистраль 17 от насоса 24.
Гидропривод работает следующим обPfl30M.
Рабочая жидкость от насоса 24 подводится к распределителям 12 и 19. В исходной позиции распределителей 12 и 19 полости 2 и 7 перекрыты, вследствие чего исключается перемещение штоков 5 и 9. При ззключении распределителя 12 в крайнюю левую пози- дню рабочая жидкость поступает в поршневую полость 7, что приводит к перемещению штока 9. Из штоковой полости 8 рабочая жидкость через сооб - щенные между собой линии 22 и 23 пе- ремещается в рабочую полость 3 гидроцилиндра 1, перемещая его поршень 4 со штоком 5 влево. Из полости 2 рабочая жидкость через соответствую0
5
0
5
0
5 0
5 g г
щую линию 13 поступает в сливную магистраль 18. Перемещение штоков 9 и 5 будет продолжаться, пока флажок 11 не воздействует на конечный выключатель 10, с которого поступает сигнал на отключение распределителя 12. При этом распределитель 12 устанавливается в исходную позицию, перекрывая линии 13 и 14, что определяет четкую остановку штока 5 исполнительного гидроцилиндра 1 в заданной позиции. Величина хода задается расстоянием между флажками 11. Реверс гидроцилиндров 6 и 1 осуществляется при переключении распределителей 12 и 19. Распределитель 12 устанавливается в крайне правую, а распределитель 19 в левую позицию. Рабочая жидкость от насоса 24 поступает в полость 2 через распределитель 12, а из полости 3 через распределитель 19 сливается в магистраль 18. Кроме того, рабочая жидкость от насоса 24 поступает через распределитель 19 в штоковую полость 8 гидроцилиндра 6, а из поршневой полости 7 через распределитель 12 сливается в магистраль 18. Тем самым обеспечивается безусловный гарантированный возврат штоков 5 и 9 обоих гидро- дилиндров 1 и 6 в исходное положение и ликвидируется накопленное за дикл рассогласования в их взаимном положении. По окончании цикла распределители 12 и 19 устанавливаются в исходное положение.
Таким образом, предлагаемый гидропривод обеспечивает точные шаговые перемещения штока 5 исполнительного гидроцилиндра 1 по заданной программе и независимый гарантированный возврат штоков 5 и 9 обоих гидроди- линдров 1 и 6 в исходное положение; чем достигается полная ликвидация .. рассогласования, вызываемая наличием утечек, перетечек и подсосом масла и воздуха в гидросистеме.
Точность шаговых перемещений повышается за счет ликвидадии накапливаемых за каждый цикл рассогласований механизма управления и исполнительного гидроцилиндра 1, кроме того, повышено быстродействие при шаговых перемещениях за счет устранения обратного управляемого клапана и связанного с ним эффекта самодросселирования, уменьшена конструктивная сложность привода (исключены клапаны
обратный и обратный управляемый и линии связи), что снижает затраты на изготовление, наладку и эксплуатацию привода.
Формула изобретения
Гидропривод шаговых перемещений, содержащий исполнительный гидроци- линдр с двумя рабочими полостями, механизм программирования, включающий гидроцилиндр с поршневой и штоко- вой полостями и установленными на штоке с возможностью взаимодействия с конечным выключателем флажками, распределительное устройство, направляющий распределитель, при этом выходные линии последнего подключены к одной из рабочих полостей и поршневой полости, две другие - к напорной и сливной магистралям, а штоковая полость связана с второй рабочей полостью через распределительное устройство, отличающийся тем, что, с целью повышения точности позиционирования и упрощения конструкции, распределительное устройство выполнено в виде двухпозиционного четырехлинейного распределителя, две линии которого непосредственно подключены к напорной и сливной магистралям, при этом в одной из позиций штокдвая полость сообщена с рабочей полостью при перекрытых напорной и сливной магистралях, а в другой позиции штоковая полость связана с напорной, а рабочая полость - со сливной магистралями.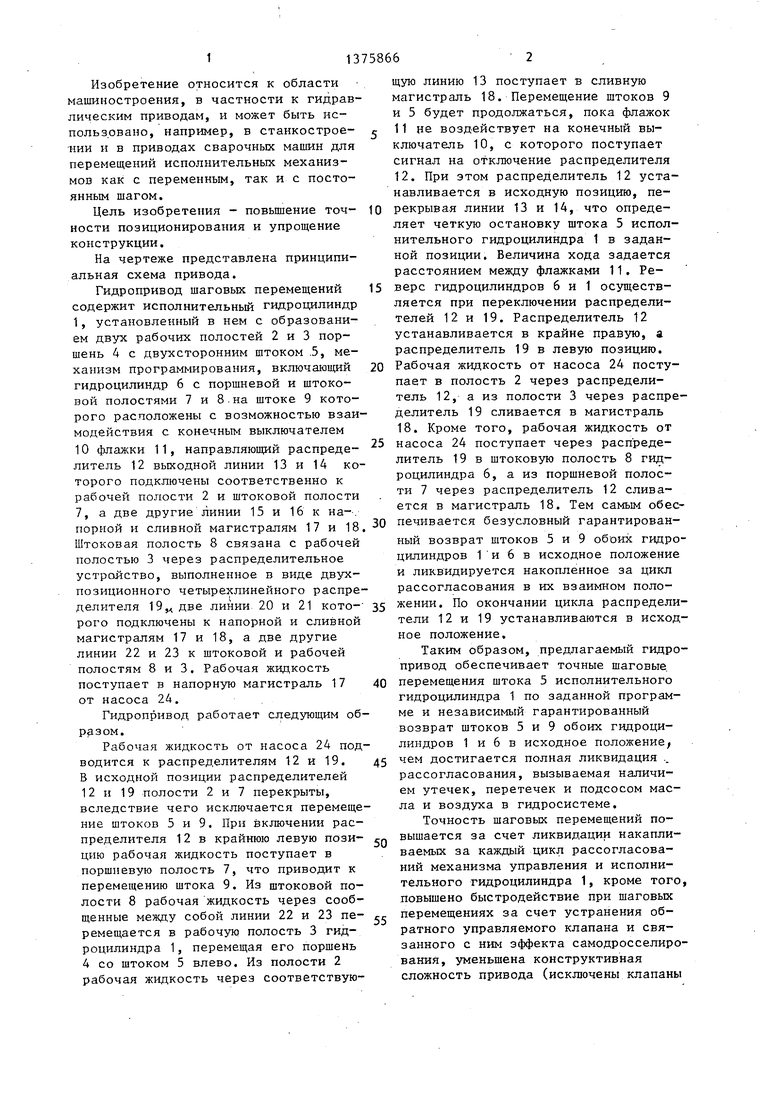

| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА СИНХРОНИЗАЦИИ ГИДРОЦИЛИНДРОВ | 1996 |
|
RU2105907C1 |
| Позиционный привод | 1989 |
|
SU1710870A1 |
| Гидропривод шагового толкателя | 1987 |
|
SU1523746A1 |
| Ленточный конвейер | 1989 |
|
SU1699872A1 |
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ СТВОРОК РАЗДВИЖНОЙ ЧАСТИ КРОВЛИ СТАДИОНА | 2014 |
|
RU2556098C1 |
| ГИДРОДВИГАТЕЛЬ СВАЕБОЙНОГО МОЛОТА | 2016 |
|
RU2614829C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД | 2001 |
|
RU2215912C2 |
| Гидросистема | 1984 |
|
SU1288381A1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ КОЛЕСАМИ ПРИЦЕПНОГО ЗВЕНА АВТОПОЕЗДА | 1991 |
|
RU2033361C1 |
| Гидравлический привод опрокидывающего механизма автомобиля-самосвала | 1985 |
|
SU1311959A1 |
Изобретение м.б. использовано в станкостроении и приводах сварочных машин. Цель изобретения - повышение точности позиционирования и упрощения конструкции. Для этого распределительное устройство выполнено в виде двухпозиционного четьфехлинейного распределителя (Р) 19, линии 20 и 21 которого непосредственно подключены к напорной и сливной магистралям (М) 17 и 18. В одной из позиций Р 19 штоковая полость 8 гидроцилиндра (ГЦ) 6 механизма программирования сообщена с рабочей полостью 3 исполнительного ГЦ 1 при перекрытых М 17 и 18. В другой позиции Р 19 штоковая г полость 8 связана с напорной, а рабочая полость 3 - со сливной М. Точность шаговых перемещений штока 5 исполнительного ГЦ повьш ается за счет ликвидации рассогласований механизма программирования и ГЦ t. Конструкция привода упрощается за счет исключения обратных клапанов и линии связи. 1 ил. i (Л
| Способ вибрационной диагностики опор приборов | 1981 |
|
SU987436A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
