1j
ел
С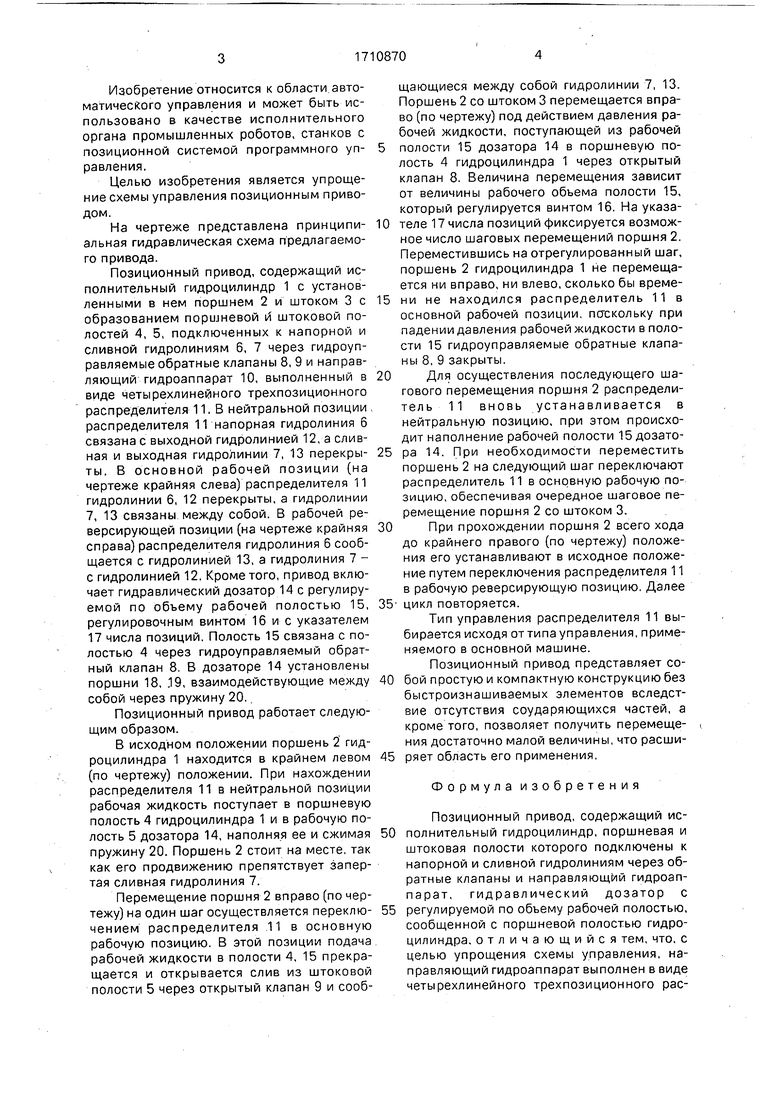
| название | год | авторы | номер документа |
|---|---|---|---|
| Система рулевого управления автопоезда | 1987 |
|
SU1474016A1 |
| Машина для литья пластмассовых изделий под давлением | 1990 |
|
SU1705108A1 |
| Гидропривод | 1982 |
|
SU1059289A1 |
| Гидропривод поршневого бетононасоса | 1990 |
|
SU1800150A1 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| Гидропривод шагового толкателя | 1987 |
|
SU1523746A1 |
| НАТЯЖНОЕ УСТРОЙСТВО СКРЕБКОВОГО КОНВЕЙЕРА ПОГРУЗОЧНОЙ МАШИНЫ | 1992 |
|
RU2057695C1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА НА ГУСЕНИЧНОМ ХОДУ | 2013 |
|
RU2531425C2 |
| Гидропривод | 1990 |
|
SU1809180A1 |
| Гидравлический позиционный привод | 1987 |
|
SU1460436A2 |
Изобретение м. б. использовано в странкостроениии промышленных роботах. Цель изобретения - упрощение схемы управления. Позиционный привод содержит гидроцилиндр 1 с поршнем 2 и штоком 3. Поршневая и штоковые полости (П) 4, 5 подключены к напорной и сливной гидролиниям (ГЛ) 6, 7 через гидроуправляемые обратные клапаны 8, 9 и направляющий гидроаппарат 10, выполненный в виде четырехлинейного трехпозиционного распределителя 11 с оригинальной коммутацией ГЛ 6, 7, 12, 13 в нейтральной, основной и реверсирующей позициях. Шаговое перемещение осуществляется при связи поршневой П 4 с рабочей П 15 дозатора 14, а штоковой П 5 - со сливной ГЛ 7. Привод представляет собой простую и компактную конструкцию без быстроизнашиваемых элементов. 1 ил.
О
оо j
О
Изобретение относится к области автоматического управления и может быть использовано в качестве исполнительного органа промышленных роботов, станков с позиционной системой программного управления.
Целью изобретения является упрощение схемы управления позиционным приводом.
На чертеже представлена принципиальная гидравлическая схема предлагаемого привода.
Позиционный привод, содержащий исполнительный гидроцилиндр 1 с установленными в нем поршнем 2 и штоком 3 с образованием поршневой и штоковой полостей 4, 5, подключенных к напорной и сливной гидролиниям 6, 7 через гидроуп- равляемые обратные клапаны 8, 9 и направляющий гидроаппарат 10, выполненный в виде четырехлинейного трехпозиционного распределителя 11. В нейтральной позиции , распределителя 11 напорная гидролиния 6 связана с выходной гидролинией 12, а сливная и выходная гидролинии 7, 13 перекрыты. В основной рабочей позиции (на чертеже крайняя слева) распределителя 11 гидролинии 6, 12 перекрыты, а гидролинии 7, 13 связаны между собой. В рабочей реверсирующей позиции (на чертеже крайняя справа) распределителя гидролиния 6 сообщается с гидролинией 13, а гидролиния 7 - с гидролинией 12. Кроме того, привод включает гидравлический дозатор 14 с регулируемой по объему рабочей полостью 15, регулировочным винтом 16 и с указателем 17 числа позиций. Полость 15 связана с полостью 4 через гидроуправляемый обратный клапан 8. В дозаторе 14 установлены поршни 18, .19, взаимодействующие между собой через пружину 20.
Позиционный привод работает следующим образом.
В исходном положении поршень 2 гидроцилиндра 1 находится в крайнем левом (по чертежу) положении. При нахождении распределителя 11 в нейтральной позиции рабочая жидкость поступает в поршневую полость 4 гидроцилиндра 1 и в рабочую полость 5 дозатора 14, наполняя ее и сжимая пружину 20. Поршень 2 стоит на месте, так как его продвижению препятствует запертая сливная гидролиния 7.
Перемещение поршня 2 вправо (по чертежу) на один шаг осуществляется переключением распределителя 11 в основную рабочую позицию. В этой позиции подача рабочей жидкости в полости 4, 15 прекращается и открывается слив из штоковой полости 5 через открытый клапан 9 и сообщающиеся между собой гидролинии 7, 13. Поршень 2 со штоком 3 перемещается вправо (по чертежу) под действием давления рабочей жидкости, поступающей из рабочей
полости 15 дозатора 14 в поршневую полость 4 гидроцилиндра 1 через открытый клапан 8. Величина перемещения зависит от величины рабочего объема полости 15, который регулируется винтом 16. На указателе 17 числа позиций фиксируется возможное число шаговых перемещений поршня 2. Переместившись на отрегулированный шаг, поршень 2 гидроцилиндра 1 не перемещается ни вправо, ни влево, сколько бы времени не находился распределитель 11 в основной рабочей позиции, поскольку при падении давления рабочей жидкости в полости 15 гидроуправляемые обратные клапаны 8, 9 закрыты.
Для осуществления последующего шагового перемещения поршня 2 распределитель 11 вновь устанавливается в нейтральную позицию, при этом происходит наполнение рабочей полости 15 дозатора 14. При необходимости переместить поршень 2 на следующий шаг переключают распределитель 11 в основную рабочую позицию, обеспечивая очередное шаговое перемещение поршня 2 со штоком 3.
При прохождении поршня 2 всего хода
до крайнего правого (по чертежу) положения его устанавливают в исходное положение путем переключения распределителя 11 в рабочую реверсирующую позицию. Далее
цикл повторяется.
Тип управления распределителя 11 выбирается исходя от типа управления, применяемого в основной машине.
Позиционный привод представляет собой простую и компактную конструкцию без быстроизнашиваемых элементов вследствие отсутствия соударяющихся частей, а кроме того, позволяет получить перемещения достаточно малой величины, что расширяет область его применения.
Формула изобретения
Позиционный привод, содержащий ис- полнительный гидроцилиндр, поршневая и штоковая полости которого подключены к напорной и сливной гидролиниям через обратные клапаны и направляющий гидроаппарат, гидравлический дозатор с регулируемой по объему рабочей полостью, сообщенной с поршневой полостью гидроцилиндра, отличающийся тем, что, с целью упрощения схемы управления, направляющий гидроаппарат выполнен в виде четырехлинейного трехпозиционного рас517108706
пределителя с открытой напорной и запер-1позиции и обеими перекрестно включеннытой сливной гидролиниями в нейтральнойми гидролиниями в рабочей реверсируюпозиции, с закрытой напорной и открытойщей позиции, а обратные клапаны
сливной гидролиниями в основной рабочейвыполнены гидроуправляемыми.
| Гидропривод шагового перемещения | 1977 |
|
SU661157A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
