Блок управления (БУ) 5 ТКА регулиру- ет скорость вращения АД I за счет изменения управляющего напряжения нб входе БУ 5 путем частичного и полного шунтирования ДН 17, Режим подъ1
Изобретение относится к электротехнике и может быть использовано в электроприводе грузоподъемных механизмов , например грузовых лебедок.
Цель изобретения - повышение 5 экономичности электропривода за счет использования энергии скольжения в тормозном режиме при спуске груза.
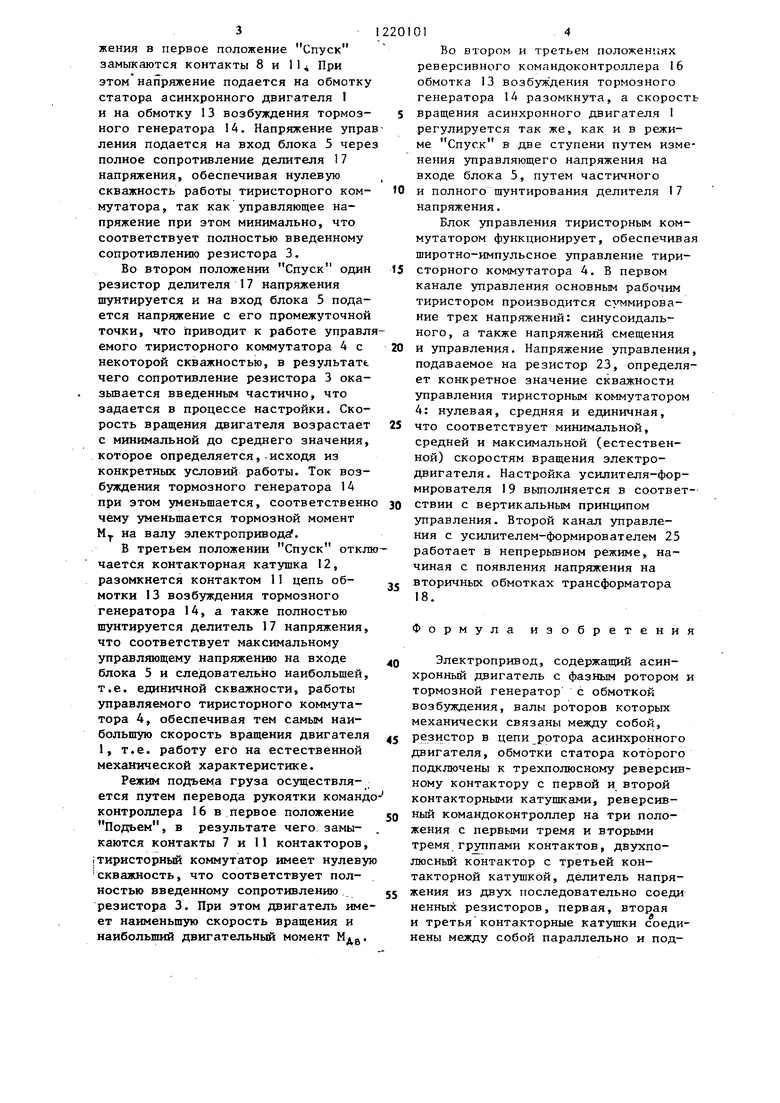
На фиг.1 приведена функциональная схема электропривода; на фиг.2 - О принципиальная схема блока управления тиристорного коммутатора.
Электропривод содержит асинхронный двигатель 1 с фазным ротором, трехфазньш мостовой вьтрямитель 2, 15 трехфазным вьшодом соединенный с обмоткой ротора, резистор 3, подключенный к выходу трехфазного мостового выпрямителя 2, параллельно которому включены управляемый тиристор- 20 ный коммутатор 4 с блоком управления 5. Трехполюсный реверсивный контактор 6 с контактами Подъем 7 и контактами Спуск 8, которым принадлежат первая и вторая контактные катушки 9 и 10 соответственно. Через замыкающийся контакт 11 катушки 12 двухполюсного контактора параллельно выходу трехфазного мостового выпрямителя 2 подключена обмотка 3 30 возбуждения тормозного генератора 14, вал ротора которого связан меха- низмами с валом асинхронного двигателя 1, контакторные катушки 9,10 и 12 соединены между собой парал- 35 лельно и подключены к однофазному вьтрямителю 15 че.рез соответствующие первые три группы контактов реверсивного командоконтроллера 16, один управляющий вход управляемого тири- 40 стора коммутатора 4, образованный ходом положительного потенциала блока управления,соединен с катодным вьшодом днофазного выпрямителя 15, катодный выод которого через вторые три группы
ема груза соответствует полностью введенному сопротивлению РЗ, при этом двигатель имеет наименьшую скорость вращения и наибольший двигательный момент. 2 ил.
тактов реверсивного командоконтроллера 16, соединенные соответственно с тремя вьшодами делителя 17 напряжения, вьптолненного на двух резисторах, связан с входом отрицательного потенциала. Напряжение управления подается на вход блока 5 управления Двигательный момент, развязьшаемый асинхронным двигателем 1, обозначен +Мдц, а тормозной момент, развязьшаемый тормозным генератором 14, обозначен - М.
Блок 5 управления управляемого тиристорного коммутатора 4 (фиг.2) содержит два канала управления, за- питанных соответственно от двух вторичных обмоток трансформатора 18 Первый канал управления содержит усилитель-формирователь 19 управляющих импульсов с первым импульсным трансформатором 20 на выходе и фазосмещающим узлом 21 на входе, который выполнен на двух резисторах 22 и 23, первый из которьк соединен с выходом источника 24 напряжения смещения, выполненного в виде независимого регулируемого источника постоянного напряжения. Резистор 23 соединен с входными вьшодами блока 5 управления. Второй канал управления содержит усилитель-формирователь 25 управляющих импульсов с вторым импульсным трансформатором 26 на выходе, с которым связан управляющий вход коммутирующего тиристора, расположенного в управляемом тиристорном коммутаторе 4, основной шш рабочий тиристор которого управляющим входом соединен с вторичной обмоткой первого импульсного трансформатора 20.
Электропривод функционирует следующим образом.
После перевода рукоятки комаидо- контроллера 16 из нейтрального поло3
жения в первое положение Спуск замыкаются контакты 8 и 11 При этом напряжение подается на обмотку статора асинхронного двигателя 1 и на обмотку 13 возбуждения тормоз- ного генератора 14. Напряжение управления подается на вход блока 5 через полное сопротивление делителя 17 напряжения, обеспечивая нулевую скважность работы тиристорного ком- мутатора, так как управляющее напряжение при этом минимально, что соответствует полностью введенному сопротивлению резистора 3.
Во втором положении Спуск один резистор делителя 17 напряжения шунтируется и на вход блока 5 подается напряжение с его промежуточной точки, что приводит к работе управляемого тиристорного коммутатора 4с некоторой скважностью, в результате чего сопротивление резистора 3 оказывается введенным частично, что задается в процессе настройки. Скорость вращения двигателя возрастает с минимальной до среднего значения, которое определяется, исходя из конкретных условий работы. Ток возбуждения тормозного генератора 14 при этом уменьшается, соответственно чему уменьшается тормозной момент М на валу электропривода.
В третьем положении Спуск отключается контакторная катушка 12, разомкнется контактом 1 цепь об- мотки 13 возбуждения тормозного генератора 14, а также полностью шунтируется делитель 17 напряжения, что соответствует максимальному управляющему напряжению на входе блока 5 и следовательно наибольшей, т.е. единичной скважности, работы управляемого тиристорного коммутатора 4, обеспечивая тем самым наибольшую скорость вращения двигателя 1, т.е. работу его на естественной механической характеристике.
Режим подъема груза осуществляется путем перевода рукоятки командо контроллера 16 в первое положение Подьем, в результате чего замыкаются контакты 7 и 11 контакторов, 1тиристорный коммутатор имеет нулевую скважность, что соответствует полностью введенному сопротивлению резистора 3. При этом двигатель имеет наименьшую скорость вращения и наибольший двигательный момент Мд.
014
Во втором и третьем положениях реверсивного командоконтроллера 16 обмотка 13 возбуждения тормозного генератора 14 разомкнута, а скорост вращения асинхронного двигателя 1 регулируется так же, как и в режиме Спуск в две ступени путем изменения управляющего напряжения на входе блока 5, путем частичного и полного шунтирования делителя 17 напряжения.
Блок управления тиристорным коммутатором функционирует, обеспечива широтно-импульсное управление тиристорного коммутатора 4. В первом канале управления основным рабочим тиристором производится с. ммирова- ние трех напряжений: синусоидального, а также напряжений смещения и управления. Напряжение управления подаваемое на резистор 23, определяет конкретное значение скважности управления тиристорным коммутатором 4: нулевая, средняя и единичная, что соответствует минимальной, средней и максимальной (естественной) скоростям вращения электродвигателя. Настройка усилителя-формирователя 19 вьтолняется в соответствии с вертикальным принципом управления. Второй канал управления с усилителем-формирователем 25 работает в непрерьшном режиме, начиная с появления напряжения на вторичных обмотках трансформатора 18.
Формула изобретени
Электропривод, содержащий асинхронный двигатель с фазным ротором тормозной генератор с обмоткой возбуждения, валы роторов которых механически связаны между собой, резистор в цепи ротора асинхронного двигателя, обмотки статора которого подключены к трехполюсному реверсивному контактору с первой и второй контакторными катушками, реверсивный командоконтроллер на три положения с первыми тремя и вторыми тремя контактов, двухполюсный контактор с третьей кон- такторной катушкой, делитель напряжения из двух последовательно соеди ненных резисторов, первая, вторая и третья контакторные катушки соединены между собой параллельно и подключены к однофазному вьшрямителю через соответствующие первые три группы контактов реверсивного коман- доконтроллера, отличающий- с я тем, что, с целью повышения экономичности, в него введены трехфазный мостовой выпрямитель с управляемым тиристорным коммутатором на выходе, параллельно которому подключены резистор непосредственно, а обмотка возбуждения тормозного генератора через контакты двухполюе
ного контактора, один управляющий вход управляемого тиристорного коммутатора подключен к одному из выводов однофазного вьшрямителя непосредственно, а другой управляющий вход управляемого тиристорного коммутатора через делитель напряжения, подключенный к соответствующим
вторым трем группам контактов командоконтролера , связан с другим выводом однофазного выпрямителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом механизма горизонтального перемещения подъемно-транспортного средства | 1989 |
|
SU1805093A1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| КРАНОВЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА ГРУЗА | 2007 |
|
RU2345945C1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298520C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2309890C2 |
| Электропривод | 1980 |
|
SU871290A1 |
| Устройство для управления механизмом горизонтального перемещения подъемного транспортного средства | 1985 |
|
SU1344712A1 |
| РЕВЕРСИВНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ДВИГАТЕЛЕМ ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2352052C2 |
| ЭЛЕКТРОПРИВОД | 2012 |
|
RU2531380C2 |
| Регулятор частоты вращения асинхронного двигателя | 1974 |
|
SU532166A1 |
Изобретение относится к электротехнике и может быть использовано в электроприводе грузоподъемных механизмов . Цель изобретения - повьше- ние экономичности электропривода. -« Электропривод содержит асинхронный двигатель (АД) 1 с фазным ротором, трехполюсный реверсивный контактор 6 с контактами Подъем 7 и. Спуск 8, контакторные катушки 9 и 10. Через замыкающийся контакт 11 катушки 12 подключена обмотка возбуждения 13 тормозного генератора 14, вал ротора которого связав с валом АД 1 . Три группы контактов реверсивного командоконтролера 16 соединены с тремя выводами делителя напряжения (ДН) 17. Введение трехфазного мостового выпрямителя 2 с управляемым тиристорным коммутатором (ТК) 4, резистора (Р) 3 обеспечивает повьше- ние экономичности электропривода. (Л ISD to
Составитель И.Болотниковский Редактор Н.Гунько Техред Н.Бонкало КорректорсА.Тяскс
1330/59
Тираж 631Подписное
ВНИШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Филиал гаш Патент, г.Ужгород, ул.Проектная,4
| Электропривод | 1978 |
|
SU712921A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Дубровский К.Н.Справочник машиниста башенных кранов.- М.: Маши- .ностроение, 1979, с.149. | |||
