/Г
00
00
00 05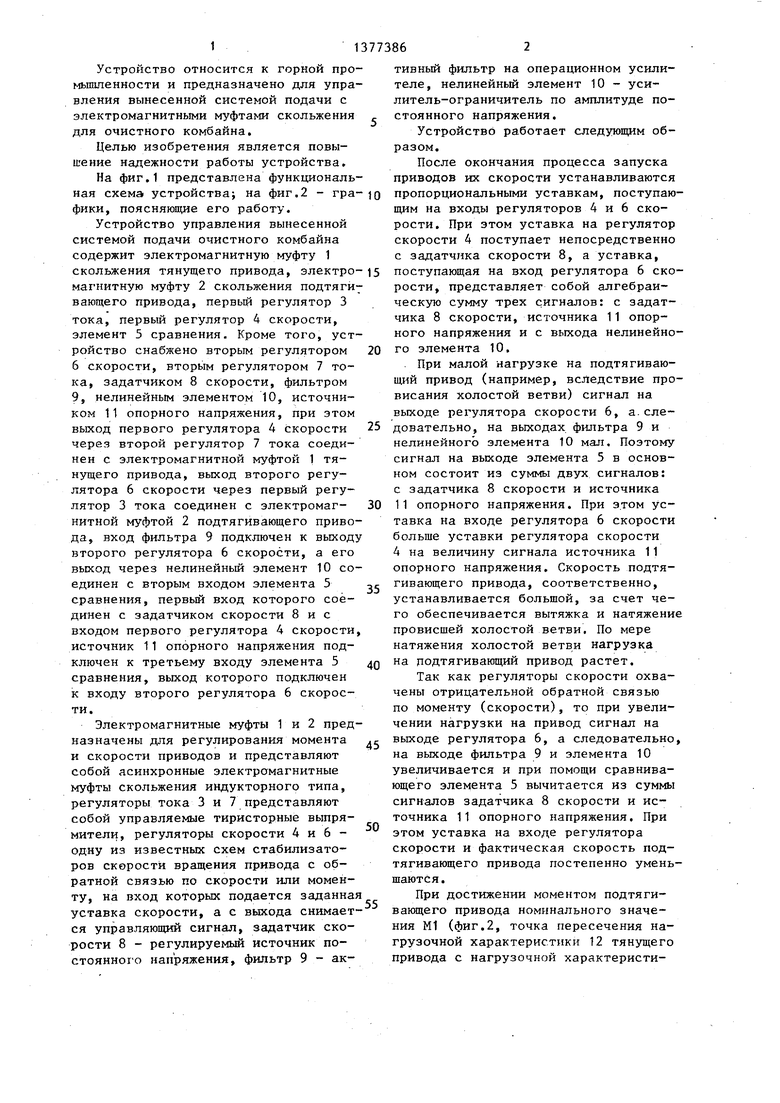
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления вынесенной системой подачи очистного комбайна | 1983 |
|
SU1134711A1 |
| Способ управления вынесенной системой подачи очистного комбайна | 1989 |
|
SU1671854A2 |
| Устройство управления многоприводным механизмом подачи горной машины | 1990 |
|
SU1731946A1 |
| Автоматический регулятор нагрузки горной машины | 1981 |
|
SU1076578A1 |
| Устройство управления электромагнитной муфтой привода горной машины | 1984 |
|
SU1190027A1 |
| Способ управления горной машиной и устройство для его осуществления | 1983 |
|
SU1105640A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СКОЛЬЖЕНИЕМ АСИНХРОННОГО ДВИГАТЕЛЯ С ФАЗНЫМ РОТОРОМ | 2001 |
|
RU2187194C1 |
| Устройство защиты цепи скребкового конвейера от перегрузки | 1982 |
|
SU1071743A1 |
| Способ управления синхронным генератором при его включении в сеть и устройство для его осуществления | 1981 |
|
SU1092691A1 |
| Регулятор нагрузки горной машины | 1983 |
|
SU1167325A1 |
Изобретение относится к горной пром-ти. Цель изобретения - повьшение надежности работы. Устр-во содержит электромагнитную муфту скольжения тянущего привода 1 и подтягивающего привода 2 с цепями, первый регулятор . 4 скорости и первый регулятор 3 тока, элемент 5 сравнения. Устр-во имеет второй регулятор 6 скорости и второй регулятор 7 тока, источник 11, опорного напряжения, фильтр 9, нелинейный элемент 10, задатчик 8 скорости. Так как регуляторы.4 и 6 охвачены отрицательной обратной связью по скорости, то при увеличении нагрузки на привод сигнал на выходе регулятора 6, фильтра 9 и элемента 10 увеличивается. Этот сигнал с помощью элемента 5 вычитается из суммы сигналов задатчика 8 и источника 11. При этом уставка на входе регуляторз 6 и фактическая скорость привода постепенно уменьшаются. При использовании устр-ва по- вьпнается качество регулирования и обеспечивается эффективная расштыбов- ка холостой ветви при ее заклинивании. 2 ил. i (Л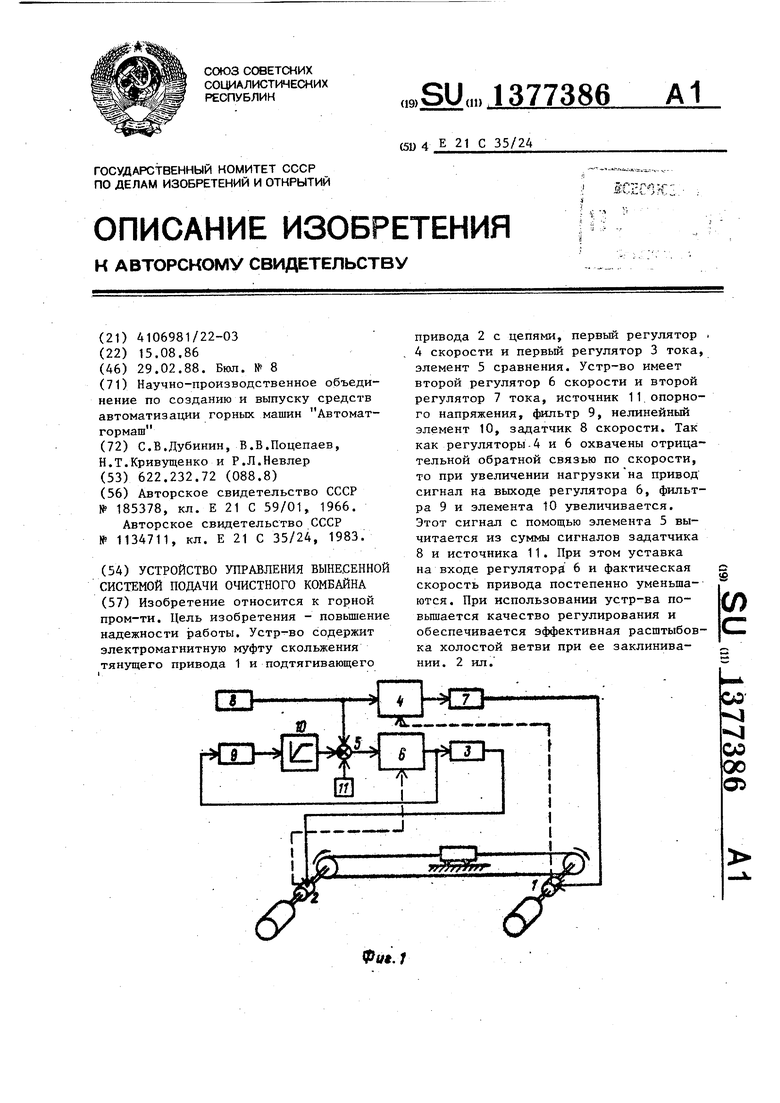
...i..J
Ptf.;
Устройство относится к горной промышленности и предназначено для управления вынесенной системой подачи с электромагнитными муфтами скольжения для очистного комбайна.
Целью изобретения является повышение надежности работы устройства,
На фиг.1 представлена функциональная схема устройства; на фиг,2 - графики, поясняющие его работу.
Устройство управления вынесенной системой подачи очистного комбайна содержит электромагнитную муфту 1 скольжения тянущего привода, электро- магнитную муфту 2 скольжения подтягивающего привода, первый регулятор 3 тока, первый регулятор 4 скорости, элемент 5 сравнения. Кроме того, устройство снабжено вторым регулятором 6 скорости, вторым регулятором 7 тока, задатчиком 8 скорости, фильтром 9, нелинейным элементом 10, источником 11 опорного напряжения, при этом выход первого регулятора А скорости через второй регулятор 7 тока соединен с электромагнитной муфтой 1 тянущего привода, выход второго регулятора 6 скорости через первый регулятор 3 тока соединен с электромаг- нитной муфтой 2 подтягивающего привода, вход фильтра 9 подключен к выходу второго регулятора 6 скорости, а его выход через нелинейный элемент 10 соединен с вторым входом элемента 5 сравнения, первый вход которого соединен с задатчиком скорости 8 и с входом первого регулятора 4 скорости, источник 11 опорного напряжения подключен к третьему входу элемента 5 сравнения, выход которого подключен к входу второго регулятора 6 скорости.
Электромагнитные муфты 1 и 2 предназначены дпя регулирования момента и скорости приводов и представляют собой асинхронные электромагнитные муфты скольжения индукторного типа, регуляторы тока 3 и 7 представляют собой управляемые тиристорные выпрямители, регуляторы скорости 4 и 6 - одну из известных схем стабилизаторов скорости вращения привода с обратной связью по скорости или моменту, на вход которых подается заданная уставка скорости, а с выхода снимается управляющий сигнал, задатчик скорости 8 - регулируемый источник по- стоянног о напряжения, фильтр 9 - ак
Q
5 0 5 0 с д
0
5
тивный фильтр на операционном усилителе, нелинейный элемент 10 - усилитель-ограничитель по амплитуде постоянного напряжения.
Устройство работает следующим образом.
После окончания процесса запуска приводов их скорости устанавливаются пропорциональными уставкам, поступающим на входы регуляторов 4 и 6 скорости. При этом уставка на регулятор скорости 4 поступает непосредственно с задатчика скорости 8, а уставка, поступающая на вход регулятора 6 скорости, представляет собой алгебраическую сумму трех сигналов: с задатчика 8 скорости, источника 11 опорного напряжения и с выхода нелинейного элемента 10.
, При малой нагрузке на подтягивающий привод (например, вследствие провисания холостой ветви) сигнал на выходе регулятора скорости 6, а.следовательно, на выходах, фильтра 9 и нелинейного элемента 10 мал. Поэтому сигнал на выходе элемента 5 в основном состоит из суммы двух сигналов: с задатчика 8 скорости и источника 11 опорного напряжения. При этом уставка на входе регулятора 6 скорости больше уставки регулятора скорости 4 на величину сигнала источника 11 опорного напряжения. Скорость подтягивающего привода, соответственно, устанавливается большой, за счет чего обеспечивается вытяжка и натяжение провисшей холостой ветви. По мере натяжения холостой ветви нагрузка на подтягивающий привод растет.
Так как регуляторы скорости охвачены отрицательной обратной связью по моменту (скорости), то при увеличении нагрузки на привод сигнал на выходе регулятора 6, а следовательно, на выходе фильтра 9 и элемента 10 увеличивается и при помощи сравнивающего элемента 5 вычитается из суммы сигналов задатчика 8 скорости и источника 11 опорного напряжения. При этом уставка на входе регулятора скорости и фактическая скорость подтягивающего привода постепенно уменьшаются .
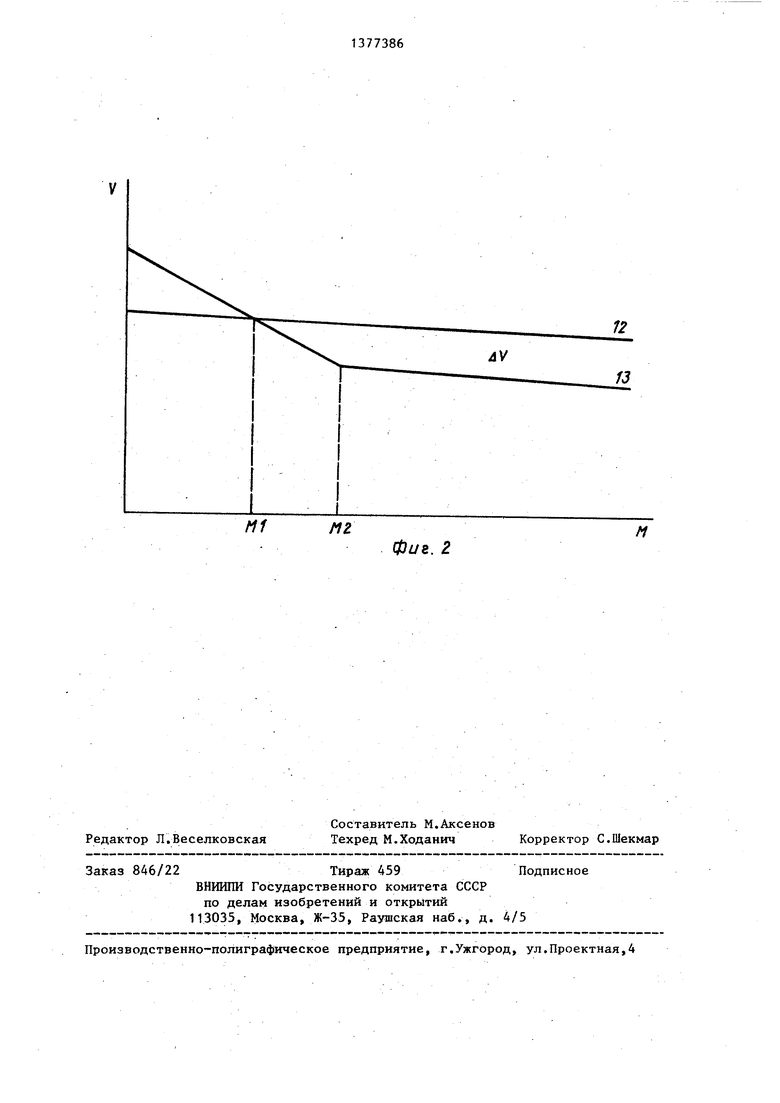
При достижении моментом подтягивающего привода номинального значения Ml (фиг.2, точка пересечения нагрузочной характеристики 12 тянущего привода с нагрузочной характеристикой 13 подтягивающего привода) скорости приводов становятся равными. При заштыбовке нижней холостой ветви скорость подтягивающего привода уменьшается за счет дальнейшего уменьшения уставки на входе регулятора 6 скорости. Одновременно возрастает и вращающий момент привода, обеспечивая продергивание и эффективную расшты- бовку холостой ветви. При превьш1ении моментом привода величины М2 сигнал на выходе нелинейного элемента 10 ограничивается и скорость подтягивающего привода становится на dV мень- ше скорости тянущего. Для исключения возможности резкого перераспределения мощности между приводами и, следовательно, для уменьшения их взаимовлияния величину uV выбирают равной 10-15% от максимального значения скорости подтягивающего привода.
При расштыбовке холостой ветви скорость подтягивающего природа плавно возрастает до величины скорости тянущего привода. Постоянная времени фильтра 9 выбирается равной (5- 10)fj|, где ,( средняя частота изменения сигнала на выходе регулятора 6 скорости, равная средней частоте изменения нагрузки привода (0,5-5 Гц), Выбор указанного значения обеспечивает плавность переходных процессов в системе подачи и устойчивость к ударным нагрузкам вследствие того, что изменение уставки подтягивающего привода несколько отстает от изменения его нагрузки (величина запаздывания цропорциональна . Введение контроля по скорости подтягивающего привода уменьшает неравномерность его движения и динамическзпо нагруженность вынесенной системы подачи в целом.
Кроме того, устройство уменьшает взаимовлияние приводов за счет обеспечения особой формы нагрузочной характеристики подтягивающего привода
с мягким участком характеристики, что повьш1ает качество регулирования при нормальной работе и обеспечивает эффективную расштыбовку холостой ветви при ее заклинивании за счет перехода на жесткий участок нагрузочной характеристики,
Формула изобретения
Устройство управления вынесенной системой подачи очистного комбайна, содержащее электромагнитную муфту скольжения тянущего привода, выходные цепи которой соединены с первым входом первого регулятора скорости, первый регулятор тока, выход которого подключен к входным цепям электромагнитной муфты скольжения подтягивающего привода, и элемент сравнения, отличающееся тем, что, с целью повьшзения надежности работы, устройство снабжено вторым регулятором тока, вторым регулятором скорости, источником опорного напряжения, фильтром, нелинейным элементом и за- датчиком скорости, выход которого подключен к второму входу первого регулятора скорости и первому входу элемента сравнения, выход которого соединен с первым входом второго регулятора скорости, выход которого подключен к входам первого регулятора тока и фильтра, выход которого соединен через нелинейный элемент с вторым входом элемента сравнения, к третьему входу которого подключен источник опорного напряжения, при этом выход первого регулятора скорости через второй, регулятор тока связан с входными цепями электромагнитной муфты скольжения тянущего привода, а выходные цепи электромагнитной муфты скольжения подтягивающего привода соединены с вторым входом второго регулятора скорости.
фиг. 2
| УСТРОЙСТВО для УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ НАГРУЗКИ ГЛАВНОГО ДВИГАТЕЛЯ | 0 |
|
SU185378A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство управления вынесенной системой подачи очистного комбайна | 1983 |
|
SU1134711A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
