Изобретение относится к горной промышленности и может быть использовано в системе автоматического регулирования и управления электроприводами угопьных комбайнов.
Известно устройство управления с вынесенной системой подачи очистного комбайна, содержащее электромагнитную муфту скольжения тянущего привода, соединенную с регулятором нагрузки и скорости, электромагнитную муфту скольжения подтягивающего привода, соединенную с регулятором тока.блок сравнения, задатчик усилия, вычитающий блок, датчик мощности подтягивающего привода, датчик давления в гидродомкрате подтягивающего привода. При этом выход датчика мощности подтягивающего привода соединен с первым входом вычитающего блока, второй вход которого соединен с выходом датчика давления в гидродомкрате подтягивающего привода, выход вычитающего блока соединен с первым входом блока сравнения, второй вход которого соединен с выходом задатчика усилия, а выход - с входом регулятора тока. Применение в известном устройстве электромагнитных муфт скольжения приводит к повышенным потерям электрической энергии, особенно на низких скоростях работы; нагрузка привода холостой ветви не зависит от нагрузки тянущего привода, а определяется заданным значением натяжения, что приводит к тому, что неэффективно используется привод холостой ветви, присс
Ј о
воды рабочей и холостой ветвей тяговой цепи загружены неравномерно.
Наиболее близок к предлагаемому устройство управления многоприводным вынесенным механизмом подачи горной машины, содержащее приводы рабочей и холостой ветвей тяговой цепи, датчик нагрузки электропривода резания, присоединенный к первому входу регулятора нагрузки, элемент сравнения, регулятор тока, датчики нагрузки приводов рабочей и холостой ветвей, выходы которых присоединены через элемент сравнения к регулятору тока привода холостой ветви тяговой цепи.
В данном устройстве нагрузка приводов рабочей и холостой ветвей тяговой цепи в статике и динамике неравномерна, поэтому привод ветви тяговой цепи недоиспользуется по мощности в статике; в динамических режимах пуска, наброса и сброса нагрузки один из приводов периодически может переходить в генераторный ре- жим, т.е. также использоваться неэффективно; схема рассчитана на устранение перегрузки привода рабочей ветви тяговой цепи, и при перегрузке привода холостой ветви тяговой цепи нагрузка не выравнивается из-за несимметричности системы управления; при быстрой перегрузке любого из приводов рабочей и холостой ветвей тяговой цепи их нагрузка не ограничивается.
Цель изобретения - повышение производительности и надежности горной машины за счет выравнивания нагрузки приводов рабочей и холостой ветвей тяговой цепи в статике и динамике.
Указанная цель достигается тем, что в устройство управления многоприводным механизмом подачи горной машины, содержащее датчики нагрузки электроприводов рабочей и холостой ветвей тяговой цепи, датчик нагрузки электропривода резания, регулятор нагрузки, первый и второй источники опорного сигнала, первый элемент сравнения, второй вход которого соединен с вторым источником опорного сигнала, дополнительно введены два сумматора, блок выравнивания нагрузки, узел выделения максимального сигнала, диод. При этом первый и второй входы регулятора нагрузки соединены соответственно с датчиком нагрузки электропривода резания и первым источником опорного сигнала, выход регулятора нагрузки соединен с первым входом первого и второго сумматоров, выходы которых соединены соответственно с управляющим входом электроприводов рабочей и холостой ветвей тяговой цепи, выход датчика нагрузки электропривода рабочей ветви
тяговой цепи присоединен к первому входу блока выравнивания нагрузки и первому входу узла выделения максимального сигнала, выход датчика нагрузки электропривода холостой ветви тяговой цепи - к второму входу блока выравнивания нагрузки и второму входу узла выделения максимального сигнала, первый выход блока выравнивания нагрузки - к вторым входам первого и вто0 рого сумматоров, а второй выход - к третьему входу первого и второго сумматоров, выход узла выделения максимального сигнала - к первому входу первого элемента сравнения, а выход элемента сравнения че5 рез диод - к четвертому входу первого и второго сумматора. Кроме того, блок выравнивания нагрузки включает второй элемент сравнения, первый и второй компараторы, узел выделения модуля, регулятор выравни0 вания нагрузки, первый и второй ключи, при этом первый вход блока выравнивания нагрузки присоединен к первому входу второго элемента сравнения, выход которого через первый компаратор присоединен к
5 управляющему входу первого ключа, через второй компаратор - к управляющему входу второго ключа, и через последовательно соединенные узел выделения модуля, регулятор выравнивания нагрузки - к входам
0 первого и второго ключей, выход первого ключа является первым выходом блока выравнивания нагрузки, а выход второго ключа - вторым выходом блока выравнивания нагрузки.
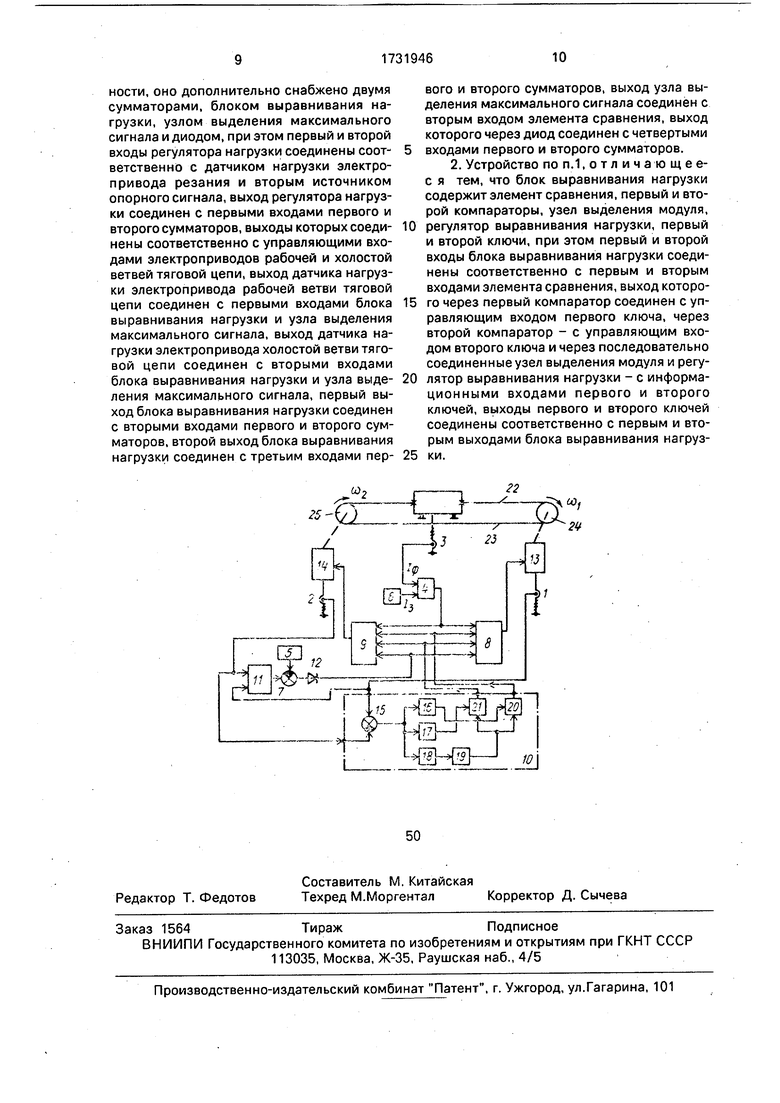
5 Устройство управления многоприводным механизмом подачи горной машины содержит датчики нагрузки электроприводов рабочей 1 и холостой 2 ветвей тяговой цепи, датчик 3 нагрузки электропривода резания,
0 регулятор 4 нагрузки, первый 5 и второй 6 источники опорного сигнала, первый элемент сравнения, второй вход которого соединен с вторым источником 6 опорного сигнала, два сумматора 8, 9, блок 10 вырав5 нивания нагрузки, узел 11 выделения максимального сигнала, диод 12. При этом первый и второй входы регулятора 4 нагрузки соединены соответственно с датчиком 3 нагрузки электропривода резания и первым
0 источником 5 опорного сигнала, выход регулятора 4 нагрузки соединен с первым входом первого 8 и второго 9 сумматоров, выходы которых соединены соответственно с управляющим входом электроприводов
5 13, 14 рабочей и холостой ветвей тяговой цепи. Выход датчика 1 нагрузки электропривода 13 рабочей ветви тяговой цепи присоединен к первому входу блока 10 выравнивания нагрузки и первому входу узла 11 выделения максимального сигнала,
выход датчика 2 нагрузки электропривода 14 холостой ветви тяговой цепи присоединен к второму входу блока 10 выравнивания нагрузки и второму входу узла 11 выделения максимального сигнала, первый выход блока 10 выравнивания нагрузки присоединен к вторым входам первого 8 и второго 9 сумматоров, а второй выход - к третьим их входам. Выход узла 11 выделения максимального сигнала присоединен к первому входу первого элемента 7 сравнения, а выход элемента 7 сравнения через диод 12 присоединен к четвертому входу первого 8 и второго 9 сумматоров.
Блок 10 выравнивания нагрузки включает второй элемент 15 сравнения, первый 16 и второй 17 компараторы, узел 18 выделения модуля, регулятор 19 выравнивания нагрузки, первый 20 и второй 21 ключи. При этом первый вход блока 10 выравнивания нагрузки присоединен к первому входу второго элемента 15 сравнения, выход которого через первый компаратор 16 присоединен к управляющему входу первого ключа 20, через второй компаратор 17 - к управляющему входу второго ключа 21 и через последовательно соединенные узел 18 выделения модуля, регулятор 19 выравнивания нагрузки - к входам первого 20 и второго 21 ключей, выход первого ключа 20 является первым выходом блока 10 выравнивания нагрузки, а выход второго ключа 21 - вторым выходом последнего. Рабочая ветвь тяговой цепи - 22, холостая ветвь -23.
Момент электродвигателей приводов 13, 14 преобразуется в усилие в рабочей 22 и холостой 23 ветвях тяговой цепи с помощью звездочек 24, 25, вращающихся через редукторы (они не показаны на чертеже ) от электроприводов 13, 14.
Устройство работает следующим образом. В нормальном режиме работы горной машины скорость перемещения комбайна и скорость перемещения рабочей 22 и холостой 23 ветвей тяговой цепи определяется сигналом с выхода регулятора 4 нагрузки, подаваемым, соответственно, через первый сумматор 8 на электропривод 13 рабочей ветви и через сумматор 9 - на электропривод 14 холостой ветви. Сигнал на выходе регулятора 4 нагрузки зависит от разности между заданным значением тока з электродвигателя резания комбайна, подаваемым с источника 5 опорного сигнала, и фактическим значением ф электродвигателя резания, измеряемым датчиком 3 тока. Если фактический ток превышает заданный (повышение крепости угля в зоне работы ир- полнительного органа комбайна), регулятор
4 нагрузки выдает сигнал на регулируемые электроприводы 13, 14, обеспечивающие снижение скорости перемещения комбайна, и тем самым обеспечивается снижение
толщины стружки, момента сопротивления, тока электродвигателя резания комбайна. В случае уменьшения фактического тока, например, из-за снижения крепости гуля, регулятор 4 нагрузки обеспечивает снижение
скорости перемещения комбайна, т.е. стабилизацию тока электродвигателя резания комбайна, путем изменения скорости подачи или толщины стружки исполнительного органа комбайна. Особенность данной системы управления заключается в том, что задание скорости на электроприводы 13,14 от регулятора 4 нагрузки выдается одной величины, т.е. это должно способствовать поддержанию нагрузки (тока) электроприводов
13, 14 на одинаковом уровне.
В процессе работы электропривода сопротивление перемещению рабочей 22 и холостой 23 ветвей может меняться, причем случайным образом - перекос цепи на отдельных секциях, заштыбовка участка цепи и т.д.; при этом меняется усилие в ветвях рабочей ветви и токи электродвигателей приводов 13, 14. Для выравнивания нагрузок электроприводов 13, 14 предназначен
блок 10 выравнивания нагрузки, на вход которого с датчиков 1 и 2 тока поступают сиг- налыфактическойнагрузки
электроприводов 13, 14 - Н; 12. В блоке 10, в элементе 15 сравнения, эти токи сравниваются, и на его выходе появляется сигнал ДНН2. Этот сигнал поступает на компаратор 16 положительного знака Д1 , сигнал на выходе которого равен единице, если , на компаратор 17 отрицательного знака Д|,
сигнал на выходе которого равен единице, если Д 0, и узле 18 выделения модуля}А1(. Сигнал | Д | с выхода узла 18 поступает на регулятор 19 выравнивания нагрузки, который по одному из типовых знаков (пропорционально-интегральный-дифференциаль - ный) формирует выходной сигнал, поступающий на ключи 20 и 21.
Если Д 0, это означает, что электропривод 13 загружен больше, чем электропривод 14, ключ 20 открыт единичным сигналом с выхода компаратора 16, и выходной сигнал регулятора 19 поступает на второй вход сумматора 8 со знаком -, на второй вход сумматора 9 - со знаком +.
При этом скорость (частота вращения) электропривода 13 и звездочки 24 уменьшается, а скорость электропривода 14 и звездочки 25 повышается, и поэтому натяжение рабочей ветви 22 ослабевает, а натяжение холостой ветви 23 увеличивается. В соответствии с этим выравниваются нагрузки электроприводов 13, 14, так как ток электропривода 13 уменьшается, а ток электропривода 14 увеличивает до их выравни- вания, когда Д1 становится равным нулю.
Если ДI 0, это значит, это электропривод 14 загружен больше электропривода 13. Единичный сигнал с выхода компаратора 17 открывается ключ 21, и выходной сигнал с регулятора 19 поступает на третий вход сумматора 8 со знаком + и на третий вход сумматора 9 - со знаком -. При этом скорость (частота вращения) электропривода 13 и звездочки 24 увеличивается, а скорость электропривода 14 и звездочки 25 уменьшается, и поэтому натяжение рабочей ветви 22 цепи увеличивается, а натяжение холостой ветви 23 уменьшается. В соответствии с этим выравниваются нагрузки электропри- водов 13 и 14, так как ток электропривода 13 увеличивается, а ток электропривода 14 уменьшается, пока не станет .
При перегрузке любого из электроприводов 13, 14 сигнал на выходе блока 11 вы- деления максимального сигнала, равный току наиболее загруженного электропривода, поступает на элемент 7 сравнения, на другой вход которого подается сигнал от источника 6 опорного сигнала, равный нэпе- редзаданной максимальной величине перегрузки, которая не может даже кратковременно действовать, например 1,2-1,4, от номинального тока электроприводов 13. 14. При превышении током любого из электроприводов 13,14 величины 1,2-1,4 их номинального значения на выходе элемента 7 сравнения появляется положительный сигнал, который через диод 12 поступает со знаком - на четвертые входы сумматоров 8 и 9, что обеспечивает быстрое одновременное снижение скоростей электроприводов 13,14, а значит и скорости подачи комбайна, толщины стружки и нагрузки (тока) этих электроприводов.
По сравнению с прототипом предлагаемое техническое решение отличается новыми признаками - двумя сумматорами 8, 9, блоком 10 выравнивания нагрузки, узлом 1 выделения максимального сигнала, элемен- том 7 сравнения, диодом 12 и их связями с перечисленными в ограничительной части формулы изобретения, и между собой.
Положительный эффект технического решения по сравнению с прототипом за- ключается в повышении производительности и надежности комбайна, причем весь эффект достигается за счет новых признаков.
Действительно, так как выходной сигнал с регулятора является одним для электроприводов рабочей и холостой ветвей тяговой цепи, то нагрузка этих электроприводов в статике одинакова. Кроме того, введение блока выравнивания нагрузки с его выходом на электроприводы рабочей и холостой ветвей тяговой цепи в статике и переходных режимах под действием возмущений, действующих на исполнительный орган комбайна. В прототипе нагрузки электроприводов рабочей и холостой ветвей тяговой цепи разные (у привода рабочей ветви в статике всегда больше, а в динамике любой из них может иметь большую нагрузку), и поэтому один из них недоиспользуется по нагрузке, а в целом недоиспользуется по нагрузке весь привод вынесенного механизма подачи комбайна. Поэтому производительность комбайна определяется по приводу рабочей ветви, а привод холостой ветви выполняет функцию протягивания ее и недоиспользуется по мощности.
В предлагаемом техническом решении использование электроприводов по нагрузке как в статике, так и в динамике одинаковое, при этом привод холостой ветви тяговой цепи воспринимает часть нагрузки привода рабочей ветви и его полезная мощность всегда больше, чем у прототипа. Поэтому при отсутствии ограничений по мощности привода резания производительность комбайна с предлагаемым устройством управления выше, чем у прототипа, за счет более полного использования мощности привода подачи.
Применение в предлагаемом техническом решении узла 11 выделения максимального сигнала, элемента 7 сравнения, диода 12 и сумматоров 8, 9 по сравнению с прототипом обеспечивает быстрое снижение линейных скоростей рабочей и холостой ветвей тяговой цепи, а значит и снижение перегрузок трансмиссий и электроприводов 13, 14 тяговой цепи и привода резания комбайна, за счет чего повышается надежность привода.
Формула изобретения 1. Устройство управления многоприводным механизмом подачи горной машины, содержащее датчики нагрузки электроприводов рабочей и холостой ветвей тяговой цепи, датчик нагрузки электропривода резания, регулятор нагрузки, первый и второй источники опорного сигнала, элемент сравнения, первый вход которого соединен с первым источником опорного сигнала, о т л и ч а ющ е е с я тем, что, с целью повышения производительности и надежности, оно дополнительно снабжено двумя сумматорами, блоком выравнивания нагрузки, узлом выделения максимального сигнала и диодом, при этом первый и второй входы регулятора нагрузки соединены соот- ветственно с датчиком нагрузки электропривода резания и вторым источником опорного сигнала, выход регулятора нагрузки соединен с первыми входами первого и второго сумматоров, выходы которых соеди- нены соответственно с управляющими входами электроприводов рабочей и холостой ветвей тяговой цепи, выход датчика нагрузки электропривода рабочей ветви тяговой цепи соединен с первыми входами блока выравнивания нагрузки и узла выделения максимального сигнала, выход датчика нагрузки электропривода холостой ветви тяговой цепи соединен с вторыми входами блока выравнивания нагрузки и узла выде- ления максимального сигнала, первый выход блока выравнивания нагрузки соединен с вторыми входами первого и второго сумматоров, второй выход блока выравнивания нагрузки соединен с третьим входами пер-
вого и второго сумматоров, выход узла выделения максимального сигнала соединен с вторым входом элемента сравнения, выход которого через диод соединен с четвертыми входами первого и второго сумматоров.
2. Устройство по п.1, о т л и ч а ю щ е е- с я тем, что блок выравнивания нагрузки содержит элемент сравнения, первый и второй компараторы, узел выделения модуля, регулятор выравнивания нагрузки, первый и второй ключи, при этом первый и второй входы блока выравнивания нагрузки соединены соответственно с первым и вторым входами элемента сравнения, выход которого через первый компаратор соединен с управляющим входом первого ключа, через второй компаратор - с управляющим входом второго ключа и через последовательно соединенные узел выделения модуля и регулятор выравнивания нагрузки - с информационными входами первого и второго ключей, выходы первого и второго ключей соединены соответственно с первым и вторым выходами блока выравнивания нагрузки.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ИСПОЛНИТЕЛЬНОГО ОРГАНА ФРОНТАЛЬНОГО АГРЕГАТА | 2002 |
|
RU2209967C1 |
| Регулируемый электропривод угольного комбайна | 1989 |
|
SU1795096A1 |
| Устройство автоматического управления забойной машиной и конвейером | 2022 |
|
RU2814926C1 |
| Устройство управления вынесенной системой подачи очистного комбайна | 1983 |
|
SU1134711A1 |
| Регулируемый электропривод угольного комбайна | 1986 |
|
SU1355706A1 |
| Способ управления горной машиной | 1990 |
|
SU1781426A1 |
| Устройство автоматического регулирования скорости подачи угледобывающего комбайна | 1986 |
|
SU1344899A1 |
| РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД ГОРНОГО КОМБАЙНА | 2001 |
|
RU2204715C1 |
| Способ управления вынесенной системой подачи очистного комбайна | 1989 |
|
SU1671854A2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ИСПОЛНИТЕЛЬНОГО ОРГАНА ФРОНТАЛЬНОГО АГРЕГАТА | 2003 |
|
RU2246615C1 |
Изобретение относится к горной промышленности, а именно к средствам автоматического управления электроприводами угледобывающих комбайнов, и позволяет повысить их производительность и надежность Датчик 3 нагрузки электропривода резания, источник 5 опорного сигнала и регулятор 4 нагрузки задают величину скорости электроприводам 13 и 14 рабочей и холостой ветви тяговой цепи, обеспечивая номинальную нагрузку электропривода резания. Датчики 1 и 2 контролируют нагрузку электроприводов 13 и 14. Блок 10 выравнивания нагрузки и сумматоры 8 и 9 обеспечи- вают равенство значений нагрузки электроприводов 13 и 14 путем регулирования их скорости. Узел 11 выделения максимального сигнала выделяет большую величину из значений нагрузки электроприводов 13 и 14, которая сравнивается с максимально допустимым значением, заданным источником 5 опорного сигнала, и при его превышении скорость подачи комбайна резко снижается и снижается нагрузка электроприводов 13 и 14. 1 ил. СП С
22
w.
| Устройство управления вынесенной системой подачи очистного комбайна | 1983 |
|
SU1134711A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОПРИВОДНЫМ ВЫНЕСЕННЫМ МЕХАНИЗМОМ ПОДАЧИ ГОРНОЙ МАШИНЫ | 0 |
|
SU362917A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
