2. Устройство для осуществления способа по п. I, содержащее гидроэлектропривод системы подачи, элемент сравнения, задатчик уставки тока, электропривод исполнительного органа, соединенный через датчик тока с фильтром нижних частот, и задатчик отсечки, подключенный к первому входу порогового элемента, отличающееся тем, что с целью повыщения надежности управления горной мащиной путем автоматического изменения скорости подачи в режиме холостого хода, устройство снабжено двумя элементами ИЛИ, дифференцирующим звеном, интегратором, блоком задержки, релейным усилителем, соединительной муфтой и сервоприводом, причем выход фильтра нижних частот соединен с первым входом первого
элемента ИЛИ, а также через последовательно соединенные дифференцирующее звено и интегратор - с вторым входом порогового элемента, первый выход которого через блок задержки подключен к первому входу второго элемента ИЛИ, выход которого соединен с первым входом элемента сравнения, выход которого подключен через последовательно соединенные релейный усилитель, сервопривод и соединительную муфту к гидроэлектроприводу системы подачи горной мащины, при этом второй .выход порогового элемента соединен с вторым входом первого элемента ИЛИ, выход которого подключен к второму входу элемента сравнения, а задатчик уставки тока подключен к второму входу второго элемента ИЛИ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор нагрузки горной машины | 1983 |
|
SU1167325A1 |
| Способ управления нагрузкой горной машины и устройство для его осуществления | 1989 |
|
SU1707199A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Устройство аврийного отключения при обрыве или стопорении цепи конвейера | 1979 |
|
SU875029A1 |
| Устройство управления электромагнитной муфтой привода горной машины | 1984 |
|
SU1190027A1 |
| Способ управления горной машиной и устройство для его осуществления | 1981 |
|
SU972092A1 |
| Устройство автоматического регулирования скорости подачи угледобывающей машины | 1980 |
|
SU928007A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ПОДАЧИ УГОЛЬНЫХ КОМБАЙНОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2066757C1 |
| Устройство автоматического управления режимом работы погрузочной машины с нагребными лапами | 1976 |
|
SU654799A1 |
| Устройство дискретного управления режимом работы погрузочной машины с нагребными лапами | 1982 |
|
SU1068596A1 |
1. Способ управления горной машиной путем изменения скорости ее подачи, включаюн.1ип заданные уставки тока, соответствуюшей номинальной загрузке электропривода, и уставки отсечки, соответствующей .колосто.му ходу электропривода, непрерывное измерение тока электропривода в заданном диапазоне частот, его сравнение с уставкой тока и уставкой отсечки, увеличение скорости подачи до номинального значения при превышении током уставки отсечки, отличающийся тем, что, с целью повышения надежности управления горной машиной путем автоматического изменения скорости подачи в режи.ме холостого хода, перед сравнением тока с уставкой отсечки дифференцируют его низкочастотную составляюшую, затем преобразуют полученный сигнал в пропорциональный его амплитуде § сигнал постоянного тока и, если этот сигнал постоянного тока меньше уставки отсечки, уменьшают скорость подачи на 15-30% от (Л номинального значения. СП 05 4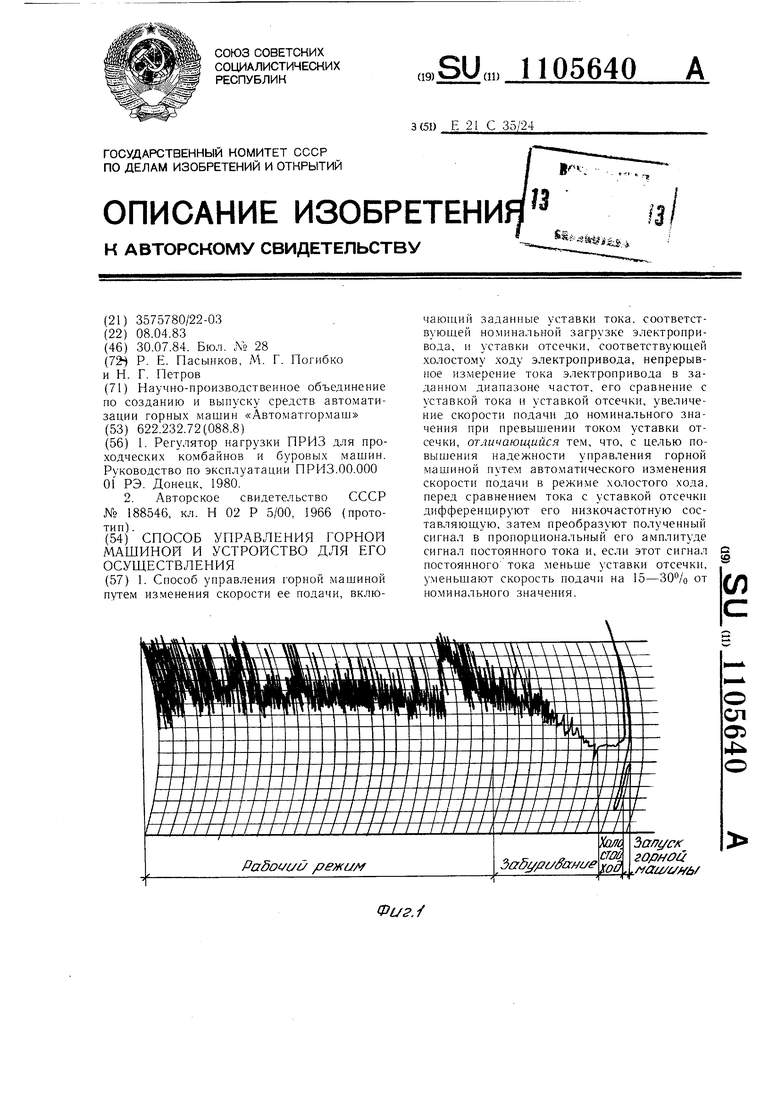
1
Изобретение относится к автоматизации управления горными мащинами и может быть использовано для автоматического регулирования системы подачи буровых машин, бурильных установок и очистных комбайнов.
Известен способ управления горной машиной по нагрузке электропривода, основанный на измерении ошибки рассогласования между заданным и фактическим значения.ми нагрузки и автоматическом регулировании скорости подачи для уменьшения этой ошибки.
Способ реализован в устройстве для автоматического регулирования нагрузки горной машины, которое содеержит систему регулирования подачи с датчиком фактической нагрузки и источником опорного сигнала 1.
В данном устройстве при снижении нагрузки горной машины после снятия подачи или при прохождении мест, где по какимлибо причинам отсутствует вырабатываемый массив, происходит автоматическое увеличение скорости подачи до максимальной величины, что может привести к недопустимым перегрузкам кинематической цепи и к поломке исполнительного органа.
Наиболее близким к изобретению по технической сущности и достигаемому результату является способ управления горной машиной путем изменения скорости ее подачи, включающий задание установки тока,
соответствующей номинальной нагрузке электропривода, и уставки отсечки, соответствующей холостому ходу электропривода, непрерывное измерение тока электропривода в заданном диапазоне частот, его сравнение с уставкой тока и уставкой отсечки, увеличение скорости подачи горной машины до номинального значения при
превышении током уставки отсечки и отключение системы регулирования подачи при уменьшении тока ниже уровня уставки отсечки.
Указанный способ реализован в устройстве для автоматического управления загрузкой главного двигателя врубово-комбайновых мащин, содержащем гидроэлектропривод системы подачи, элемент сравнения, задатчик уставки тока, электропривод исполнительного органа, соединенный через датчик тока с фильтром нижних частот, и задатчик отсечки, подключенный к первому входу порогового элемента 2.
В известном устройстве, если уровень
- тока электропривода станет ниже уставки отсечки, пороговое устройство отключит систему регулирования, и в результате подача останется на том же уровне.
Известный способ не обеспечивает надежную информацию о наличии холостого
.хода горной мащины, так как для широкого класса горных мащин уровень холостого .хода изменяется в широких пределах, и даже для одной и той же мащины уровень холостого хода в процессе работы также изменяется в щироких пределах, а для буровых мащин характерно его увеличение при увеличении длины скважины из-за наличия трения бурового става о стенки скважины, что может привести к- ложному переводу буровой мащины в режим увеличения подачи и к недопустимым перегрузкам вследст0 вие удара исполнительного органа о забой. Увеличить уровень уставки отсечки, который бы перекрыл уровень холостого хода широкого класса горных мащин, возможно однако при этом уровень холостого хода приближается к уровню номинальной
5 нагрузки, что уменьщает диапазон увеличения скорости подачи горной мащины и снижает надежность известного устройства и способа.
К недостаткам способа относится также сохранение прежней скорости подачи при возникновении холостого хода горной машины, что может привести к ударам исполнительного органа о забой при последующем соприкосновении с массивом. Это снижает надежность известного способа.
Кроме того, мгновенное отключение подачи при достижении тока электропривода уставки отсечки при неизбежном колебании нагрузки ведет к частым отключениям подачи. При этом работа становится неустойчивой, что также снижает надежность способа и устройства.
Целью изобретения является повышение надежности управления горной машиной путем автоматического изменения скорости подачи в режиме холостого хода.
Поставленная цель достигается тем, что согласно способу управления горной машиной путем изменения скорости ее подачи, включающе.му задание уставки тока, соответствуюшей номинальной загрузке электропривода, и уставки отсечки, соответствуюшей холостому ходу электропривода, непрерывное измерение тока электропривода в заданном диапазоне частот, его сравнение с уставкой тока и уставкой отсечки, увеличение скорости подачи горной машины до номинального значения при превышении током уставки отсечки, перед сравнением тока с уставкой отсечки дифференцируют его низкочастотную составляющую, затем преобразуют полученный сигнал в пропорциональный его амплитуде сигнал постоянного тока и, если этот сигнал постоянного тока меньше уставки отсечки, уменьшают скорость подачи горной машины на 15-30% от номинального значения.
Кроме того, устройство управления горной машиной, содержащее гидроэлектропривод системы подачи, элемент сравнения, задатчик уставки тока, электропривод исполнительного органа, соединенный через датчик тока с фильтром нижних частот, и задатчик отсечки, подключенный к первому входу порогового элемента, снабжено двумя элементами ИЛИ, дифференцирующим звеном, интегратором, блоком задержки, релейным усилителем, соединительной муфтой и сервоприводом, причем выход фильтра нижних частот соединен с первым входом первого элемента ИЛИ, а также через последовательно соединенные дифференцирующее звено и интегратор - с вторым входом порогового элемента, первый выход которого подключен через блок задержки к первому входу второго элемента ИЛИ, выход которого соединен с первым входом элемента сравнения, выход которого подключен через последовательно соединенные релейный усилитель, сервопривод и соединительную муфту к гидроэлектроприводу системы подачи горной машины, при этом второй выход порогового элемента соединен с вторым входом первого элемента ИЛИ, выход которого подключен к второ.му входу элемента сравнения, а задатчик уставки тока подключен к второму входу второго элемента ИЛИ.
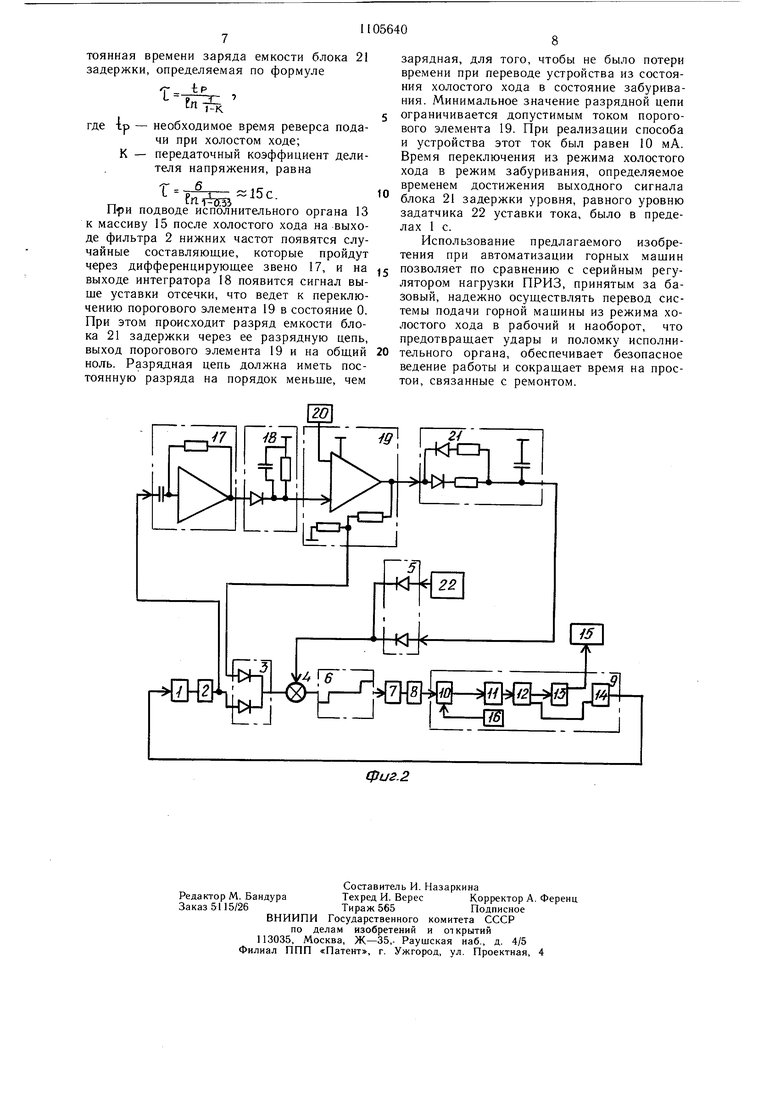
На фиг. 1 изображена осциллограмма нагрузки буровой машины БГ4-4; на фиг. 2 - блок-схема устройства управления горной машиной.
Устройство содержит датчик 1 тока,
0 фильтр 2 нижних частот, первый элемент ИЛИ 3, элемент 4 сравнения с подключенны.м к нему вторым элементом ИЛИ 5, релейный усилитель 6, сервопривод 7, соединительную муфту 8, горную машину 9. Горная машина 9 содержит гидродроссель 10,
5 гидросистему 11 подачи, буровой став 12, исполнительный орган 13, электропривод 14 исполнительного органа. Исполнительный орган 13 предназначен для разрушения массива 15. Электропривод 14 предназначен
для вращения бурового става 12, который предназначен для передачи энергии вращения электропривода 14 и энергии подачи гидросистемы II подачи на исполнительный орган 13. Электропривод системы подачи 16 вместе с гидродросселем 10 входит в состав
5 гидроэлектропривода системы подачи и предназначен для создания номинального напора масла в гидравлической системе I1 подачи, соответствующего номинальной нагрузке электропривода 14 исполнительного органа. Датчик 1 тока предназначен для из0 мерения тока электропривода 14, фильтр 2 нижних частот предназначен для выделения низкочастотной составляющей этого тока в диапазоне О-0,5 Гц. Элемент 4 сравнения предназначен для вычитания выходного сигнала первого элемента ИЛИ 3
5 от выходного сигнала второго элемента ИЛИ 5, релейный усилитель 6 предназначен для преобразования полученной разности элемента 4 сравнения в логические сигналы (-1,0,1), соответствующие уменьшению, сохранению и увеличению скорости подачи гор0 ной .машины 9. Сервопривод 7 предназначен для преобразования указанных сигналов в угол поворота, пропорциональный длительности их следования. Соединительная муфта 8 предназначена для передачи углового перемещения гидродросселю 10. Гид5 родроссель 10 предназначен для преобразования углового перемещения муфты 8 в пропорциональный ему по величине расход масла гидросистемы II подачи.
На выходе фильтра 2 нижних частот установлены последовательно соединенные
дифференцирующее звено 17, интегратор 18, пороговый элемент 19 с задатчиком 20 отсечки и блок 21 задержки, выход которого связан с вторым входом второго логического блока ИЛИ 5, а вход - через делитель напряжения связан с входом первого элемента ИЛИ 3. Дифференцирующее звено 17 предназначено для преобразования измеренного тока на выходе фильтра 2 нижних частот в сигнал, пропорциональный скороети его изменения. Диод интегратора 18 предназначен для развязки зарядно-разрядных цепей емкости интегратора. Интегратор 18 предназначен для накопления и запоминания в течение времени, обусловленного постоянной разряда емкости, поступающих на него сигналов. Пороговый элемент 19 предназначен для переключения в состояние О, если выходной сигнал с интегратора 18 выше, чем сигнал отсечки, и в состояние 1 - в противном случае. Блок 21 задержки импульсов предназначен для задержки сигнала логической единицы с порогового элемента 19 на второй элемент ИЛИ 5. Ко второму входу логического блока ИЛИ 5 подключен задатчик 22 уставки тока, выходной сигнал которого соответствует номинальной загрузке электропривода 14. Логические блоки 3 и 5 предназначены для подачи на элемент 4 сравнения наибольших из поступивших на их входы сигналов.
Устройство работает следуюшим образом.
С задатчика 22 уставки тока через второй логический блок ИЛИ 5 на элемент 4 сравнения поступает уставка тока, соответствующая номинальной загрузке электропривода 14, а с задатчика 20 отсечки на пороговый элемент 19 поступает уставка отсечки, соответствующая 5-10%. от номинальной загрузки электропривода 14, т. е. равной 0,05-0,1 от уставки тока. Измеряют ток электропривода 14 в заданном низкочастотном диапазоне с помощью датчика 1 тока и фильтра 2 нижних частот. Выходной сигнал с выхода фильтра 2 нижних частот поступает через первый элемент ИЛИ 3 на элемент 4 сравнения, где он сравнивается с уставкой тока, а также сравнивается после прохождения через дифференцирующее звено 17, интегратор 18 с уставкой отсечки. Если после дифференцирования и интегрирования его величина окажется выше уставки отсечки, что характерно для режима забуривания и рабочего, то на выходе порогового элемента 19 установится сигнал логического нуля, и на элементе 4 сравнения измеренный ток будет сравниваться с уставкой тока. Если он будет ниже уставки тока, то на выходе релейного усилителя 6 появится сигнал, который приводит к вращению сервопривода 7 и соединительной муфты 8 на угол, пропорциональный времени действия сигнала. При этом происходит пропорциональное открывание гидродросселя 10, что вызывает пропорциональное увеличение расхода масла, поступающего с электропривода системы подачи 16 через гидродроссель 10 на гидравлическую систему 11 подачи, в результате чего пропорционально увеличивается скорость подачи бурового става 12, а соответственно, и исполнительного органа 13 на массив 15. Это ведет к увеличению крутящего момента на исполнительном органе 13, а следовательно, на электроприводе 14. При этом
происходит пропорциональное увеличение его тока, и соответственно увеличивается измеренный ток на выходе фильтра 2 нижних частот. Это будет происходить до тех пор, пока измеренный ток не приблизится к уставке тока на величину, равную зоне нечувствительности релейного усилителя 6, после чего сигнал на его выходе будет равен нулю, и скорость подачи изменяться не будет. Аналогично, но с другим знаком, происходит отработка ошибки рассогласования, если измеренный ток оказывается выше уставки тока. Это обеспечивает при забуривании увеличение тока до номинального значения и его стабилизацию в рабочем режиме на номинальном уровне путем изменения скорости подачи.
При холостом ходе электропривода 14 на выходе фильтра нижних частот 2 сигнал будет практически постоянного тока. Он не пройдет через дифференцирующее звено 17, и на его выходе уровень сигнала будет равен нулю. При этом на выходе интегратора 18 сигнал будет также равен нулю, что приведет к переключению порогового элемента 19 в положение логической единицы, так как в этом случае сигнал отсечки окажется выще. Сигнал логической единицы выбирается такой величины, чтобы он был выще сигнала задатчика 22 уставки тока. Это достигается с помошью делителя порогового элемента 19. Например, он может быть равен 1,2 от уставки тока. При его поступлен-ии через элемент ИЛИ 3 на элемент 4 сравнения на выходе релейного усилителя 6 появится сигнал -1. При этом будет осуществляться уменьшение подачи горной мащины 9, которое ограничивается по времени таким образом, чтобы при холостом ходе подача была уменьщена на 15-30 от номинального значения. Это вре.мя определяется следующим образом. Берется время полного открывания гидродросселя 10 от полностью закрытого состояния до пол10 от полностью закрытого состояния до полностью закрытого состояния до ностью открытого, которое соответствует или близко к номинальному режиму. И от этого времени берется указанный процент. Например, если от одного крайнего положения до другого сервопривод 7 поворачивает муфту 8 гидродросселя 10 за 30 с, то это время должно быть выбрано в диапазоне 4,5-9 с. Затем выбирают постоянную времени заряда емкости блока 21 задержки таким образом, чтобы через выбранное время заряд на емкости был равен напряжению порогового элемента 19 при переключении его в состояние 1. Этим обеспечивается уменьщение подачи горной мащины при холостом ходе на 15-30% от номинального значения. Так, если с делителя напряжения снимается треть сигнала логической единицы, время реверса равно 6 с, то постоянная времени заряда емкости блока 21 задержки, определяемая по формуле где IP - необходимое время реверса подачи при холостом ходе; К - передаточный коэффициент делителя напряжения, равна nf)H подводе исполнительного органа 13 к массиву 15 после холостого хода на выходе фильтра 2 нижних частот появятся случайные составляющие, которые пройдут через дифференцирующее звено 17, и на j выходе интегратора 18 появится сигнал выше уставки отсечки, что ведет к переключению порогового элемента 19 в состояние 0. При этом происходит разряд емкости блока 21 задержки через ее разрядную цепь, выход порогового элемента 19 и на общий 20 ноль. Разрядная цепь должна иметь постоянную разряда на порядок меньше, чем 5 зарядная, для того, чтобы не было потери времени при переводе устройства из состояния холостого хода в состояние забуривания. Минимальное значение разрядной цепи ограничивается допустимым током порогового элемента 19. При реализации способа и устройства этот ток был равен 10 мА. Время переключения из режима холостого хода в режим забуривания, определяемое временем достижения выходного сигнала блока 21 задержки уровня, равного уровню задатчика 22 уставки тока, было в пределах 1 с. Использование предлагаемого изобретения при автоматизации горных машин позволяет по сравнению с серийным регулятором нагрузки ПРИЗ, принятым за базовый, надежно осуществлять перевод системы подачи горной машины из режима холостого хода в рабочий и наоборот, что предотвращает удары и поломку исполнительного органа, обеспечивает безопасное ведение работы и сокращает время на простой, связанные с ремонтом.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Регулятор нагрузки ПРИЗ для проходческих комбайнов и буровых машин | |||
| Руководство по эксплуатации ПРИЗ.00.000 of РЭ | |||
| Донецк, 1980 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЗАГРУЗКОЙ ГЛАВНОГО ДВИГАТЕЛЯ ВРУБОВО-КОМБАЙНО-ВЫХ МАШИН | 0 |
|
SU188546A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
