Изобретение относится к горной промышленности, может быть использовано для управления вынесенной системой подачи очистного комбайна и является усовершенствованием способа по авт. ев № 1461919
Целью изобретения является/улучшение динамических характеристик подающей и режущей частей комбайна
Данный способ позволяет за счет регулирования разности углов поворота приводных звездочек в зависимости от усилия в рабочем участке тяговой цепи и ее длины не допускать ослабления натяжения верхнего холостого участка тяговой цепи и поддерживать ее натяжение на определенном уровне.
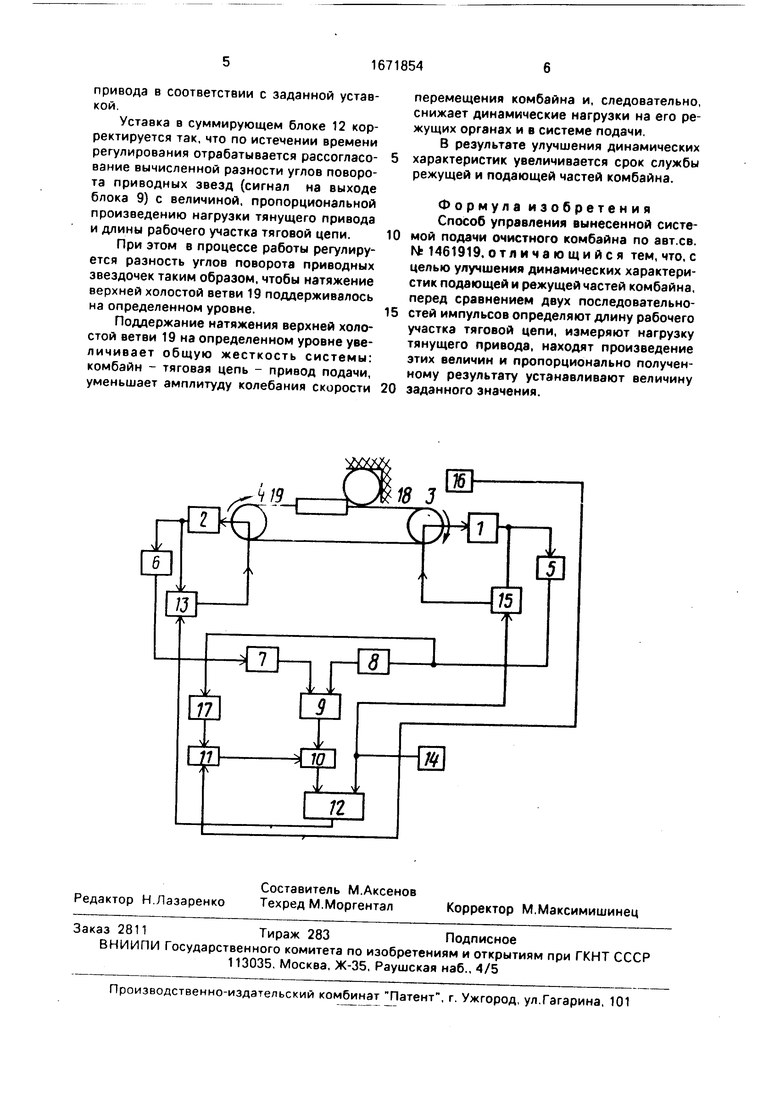
На чертеже представлено устройство, реализующее способ управления вынесенной системой подачи очистного комбайна
Устройство содержит датчики 1 и 2 скорости (ДС) вращения электромагнитных муфт скольжения тянущего привода (ТП) 3 подтягивающего привода (ПП) 4, формирователи 5 и 6 импульсов, счетчики 7 и 8 импульсов, вычитающий блок 9, элемент 10 сравнения, блок 11 умножения, суммирующий блок 12, регулятор 13 скорости подтягивающего привода, задатчик 14 скорости подачи, регулятор 15 скорости тянущего привода, датчик 16 тока электродвигателя тянущего привода, блок 17 вычисления длины рабочего участка тяговой цепи
о
00
ел
го
Известно, что упругое усилие натяжения тяговой цепи пропорционально ее удлинению
,(1)
где Л L - удлинение цепи; С - жесткость цепи. Жесткость цепи в свою очередь равна § L
где Е - погонная жесткость цепи; L - длина участка цепи. Из формул (1) и (2) можно определить удлинение участка цепи
i.О)
Г4 (2)
А Д
При перемещении работающего комбайна возникает упругое натяжение рабочего участка тяговой цепи. При этом происходит его удлинение, которое при синхронно вращающихся приводных звездочках приводит к ослаблению натяжения верхнего холостого участка и собиранию петли из тяговой цепи возле приводного узла ПП. Для компенсации ослабления натяжения необходимо создать положительную разность,углов поворота приводных звездочек ТП и ПП. Величину этой разности можно найти из выражения
4
где Lp - длина рабочего участка цепи;
Л - удлинение рабочего участка цепи;
R - радиус приводной звездочки.
Таким образом, для компенсации ослабления натяжения верхнего холостого участка цепи необходимо поддержание положительной разницы в углах поворота приводных звездочек и ее величину регулировать пропорционально произведению усилия упругого натяжения рабочего участка тяговой цепи и его длины. Степень снижения динамической нагруженности изменяется в зависимости от длины верхнего холостого участка тяговой цепи.
При длине этого участка менее 80 м его жесткость принимает наибольшее значение, что обеспечивает максимальную эффективность снижения нагрузок. При увеличении длины верхнего холостого участка тяговой цепи более 80 м и, следовательно, при уменьшении его жесткости эффективность снижения нагрузок несколько снижается, однако уровень динамических нагрузок не возрастает за счет уменьшения длины и увеличения жесткости рабочего участка тяговой цепи.
Способ управления вынесенной системой подачи очистного комбайна осуществляется следующим образом.
После запуска приводов ВСП регулятор
5 15 скорости устанавливает частоту вращения ЭМС ТП, в соответствии с заданной уставкой по скорости задатчика 14, которая выбирается в соответствии с необходимой груженностью двигателя резания комбай10 на 20.
Управление электромагнитной муфтой скольжения подтягивающего привода 4 производится при помощи регулятора 13 скорости.
15 При помощи датчиков 1 и 2 раздельно контролируется частота вращения ЭМС ТП и ПП 4, для чего при помощи формирователей 5 и 6 импульсов формируются две последовательности импульсов.
20 При этом частота импульсов на выходе формирователя 5 пропорциональна частоте сигнала датчика 1 скорости ЭМС тянущего привода 3, а частота импульсов на выходе формирователя 6 - частоте сигнала датчика
25 скорости ЭМС подтягивающего привода 4. Эти две последовательности поступают соответственно на счетчики 7 и 8. Подсчетом импульсов счетчиками 7 и 8 определяют углы поворота приводных звездочек ТП и ПП.
30Сигналы с счетчиков 7 и 8 поступают для
сравнения на вычитающий блок 9, на выходе которого образуется сигнал, пропорциональный разности углов поворота приводных звезд. Этот сигнал подается на
35 один из входов элемента 10 сравнения. На другой его вход поступает выходной сигнал блока 11 умножения, на входы которого поступают сигналы с блока 17 вычисления длины рабочего участка цепи 18 и сигнал с
40 датчика 16 тока, пропорциональный нагрузке привода, а следовательно, и упругому натяжению рабочего участка цепи. На выходе блока 10 сравнения образуется сигнал рассогласования между сигналом, пропорцио45 нальным разности углов поворота приводных звездочек, и сигналом, пропорциональным произведению нагрузки ТП (упругому натяжению рабочего участка цепи) и длины рабочего участка цепи. Сигнал рас50 согласования поступает на первый вход суммирующего блока 12, на второй вход которого поступает сигнал уставки по скорости задатчика 14.
На выходе суммирующего блока 12 вы55 рабатывается скорректированный для подтягивающего привода сигнал уставки по скорости, который поступает на вход регулятора 13 скорости. Последний устанавливает скорость ЭМС подтягивающего
привода в соответствии с заданной уставкой.
Уставка в суммирующем блоке 12 корректируется так, что по истечении времени регулирования отрабатывается рассогласо- вание вычисленной разности углов поворота приводных звезд (сигнал на выходе блока 9) с величиной, пропорциональной произведению нагрузки тянущего привода и длины рабочего участка тяговой цепи.
При этом в процессе работы регулируется разность углов поворота приводных звездочек таким образом, чтобы натяжение верхней холостой ветви 19 поддерживалось на определенном уровне.
Поддержание натяжения верхней холостой ветви 19 на определенном уровне увеличивает общую жесткость системы: комбайн - тяговая цепь - привод подачи, уменьшает амплитуду колебания скорости
перемещения комбайна и, следовательно, снижает динамические нагрузки на его режущих органах и в системе подачи.
В результате улучшения динамических характеристик увеличивается срок службы режущей и подающей частей комбайна.
Формула изобретения Способ управления вынесенной системой подачи очистного комбайна по авт.св. № 1461919. отличающийся тем, что, с целью улучшения динамических характеристик подающей и режущей частей комбайна, перед сравнением двух последовательностей импульсов определяют длину рабочего участка тяговой цепи, измеряют нагрузку тянущего привода, находят произведение этих величин и пропорционально полученному результату устанавливают величину заданного значения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления вынесенной системой подачи очистного комбайна | 1983 |
|
SU1134711A1 |
| Устройство управления многоприводным механизмом подачи горной машины | 1990 |
|
SU1731946A1 |
| Устройство управления вынесенной системой подачи очистного комбайна | 1986 |
|
SU1377386A1 |
| Очистной узкозахватный комбайн | 1986 |
|
SU1384744A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ИСПОЛНИТЕЛЬНОГО ОРГАНА ФРОНТАЛЬНОГО АГРЕГАТА | 2002 |
|
RU2209967C1 |
| ОЧИСТНОЙ МЕХАНИЗИРОВАННЫЙ КОМПЛЕКС ПРОФЕССОРА КАРИМАНА ДЛЯ ДОБЫЧИ ИСКОПАЕМОГО КРУПНЫМИ БЛОКАМИ | 2011 |
|
RU2463450C1 |
| Способ управления вынесенной системой подачи очистного комбайна | 1987 |
|
SU1461919A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ИСПОЛНИТЕЛЬНОГО ОРГАНА ФРОНТАЛЬНОГО АГРЕГАТА | 2005 |
|
RU2282719C1 |
| ОЧИСТНОЙ КОМБАЙН ДЛЯ ТОНКИХ ПЛАСТОВ УГЛЯ | 1989 |
|
RU2016194C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ИСПОЛНИТЕЛЬНОГО ОРГАНА ФРОНТАЛЬНОГО АГРЕГАТА | 2003 |
|
RU2246615C1 |
Изобретение относится к горной промышленности и может быть использовано для управления вынесенной системой подачи /ВСП/ очистного комбайна. Целью изобретения является улучшение динамических характеристик подающей и режущей частей комбайна. Для этого контролируют раздельно частоту вращения электромагнитных муфт скольжения /ЭМС/ тянущего привода /ТП/ и подтягивающего привода /ПП/. С этой целью формируют две соответствующие указанным частотам последовательности импульсов /ПИ/. Подсчитывают количество импульсов в каждой ПИ. Вычисляют разницу между количествами импульсов двух ПИ. Затем определяют длину рабочего участка тяговой цепи и нагрузку ТП. Находят произведение этих величин. Пропорционально полученному результату устанавливают величину заданного значения разности частот вращения муфт скольжения ТП и ПП. Сравнивают с этим заданным значением текущее значение разности частот. И по результатам сравнения корректируют уставку по частоте вращения муфт скольжения ПП. 1 ил.
| Способ управления вынесенной системой подачи очистного комбайна | 1987 |
|
SU1461919A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
