О9
Ч

| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочий орган погрузочной машины | 1983 |
|
SU1086189A1 |
| Погрузочная машина | 1989 |
|
SU1620407A1 |
| Погрузочная машина | 1989 |
|
SU1620408A1 |
| Рабочий орган погрузочной машины | 1980 |
|
SU1237776A1 |
| РАБОЧИЙ ОРГАН ПОГРУЗОЧНОЙ МАШИНЫ | 1997 |
|
RU2133213C1 |
| Рабочий орган погрузочной машины | 1983 |
|
SU1089276A1 |
| РАБОЧИЙ ОРГАН ПОГРУЗОЧНОЙ МАШИНЫ | 1997 |
|
RU2137693C1 |
| Устройство для управления рабочим органом погрузочной машины с клиновым носком | 1981 |
|
SU1155690A1 |
| Устройство для выемки пологих пластов полезного ископаемого | 1984 |
|
SU1182181A1 |
| ПОГРУЗОЧНЫЙ ОРГАН | 2016 |
|
RU2619415C1 |
Изобретение относится к погрузочным машинам (ПМ), а именно к рабочим органам ПМ, и упрощает их управление. Рабочий орган ПМ выполнен в виде рамы 1 с клиновым носком 2 и наклонного лотка 3. Внутри рамы 1 расположены штанги 5. Механизм их перемещения выполнен в виде расположенной между рамой 1 и штангой 5 : пружины (п) 7 и установленного на наклонном лотке 3 кулачка 9. При работе ПМ внедрение рамы 1 в погружаемый материал осуществляется цилиндрами 4. При этом стопор ГО фиксирует кулачок 9 и препятствует совместному движению рамы 1 и штанги 5. Затем убирается вьщвижная пластина 6 и происходит сжатие П 7. После фиксации П 7 зацепом 8 стопор 10 освобождает кулачок 9, что обеспечивает совместное движение рамы 1 и штанг 5. Это обеспечивает заполнение внутреннего пространства рамы 1 погружаемым материалом. При достижении рамой 1 максимальной глубины внедрения зацеп 8 отжимается упором 11. 6 ил.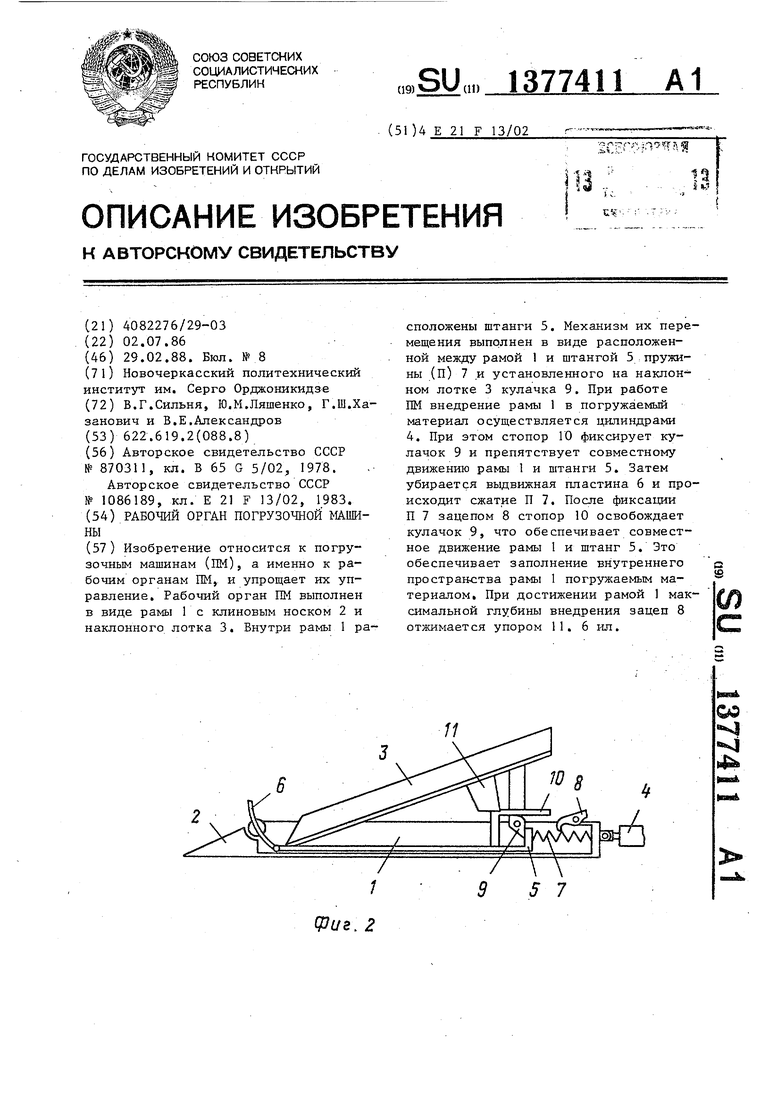
. 2
Изобретение относится к погрузоч- ным машинам, в частности к рабочим органам для погрузки руды и породы в
с.
условиях горных выработок и рудников
Цель изобретения - упрощение управления рабочим органом погрузочной машины,
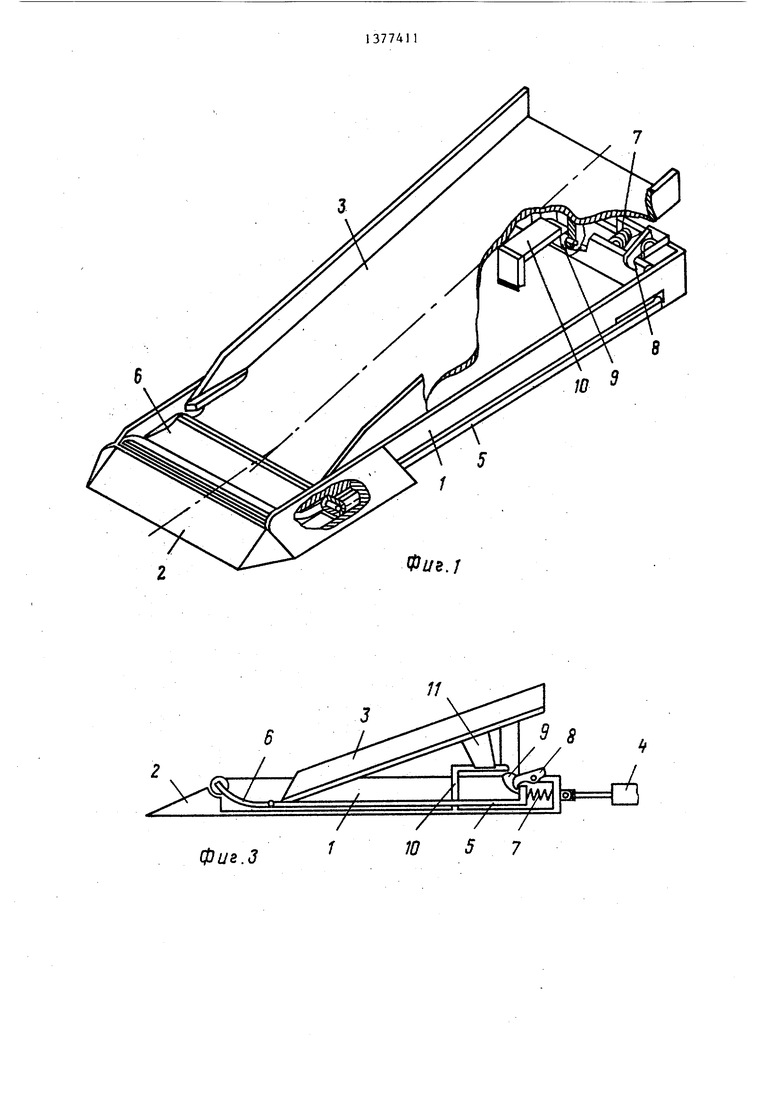
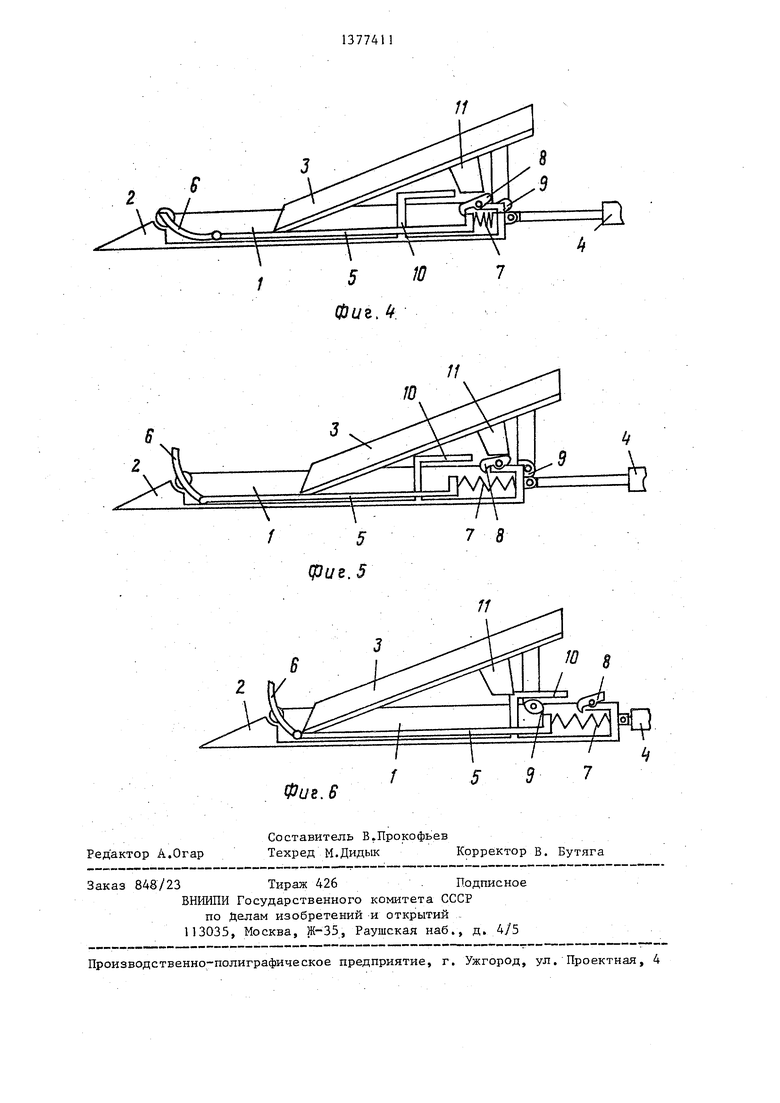
На фиг.1 изображен рабочий орган, аксонометрия; на фиг.2 - то же,.в на чале выдвижения рамы, вид сбоку; на фиг.З - то же, в начале внедрения в породу (фиксация штанг зацепом); на фиг.4 - то же, в конце внедрения ра- мь1 в породу; на фиг.З - то же, в
конце перемещения выдвижной пластины; на фиг.6 - то же, в конце перемещения рамы к лотку.
Рабочий орган погрузочной машины включает раму 1 прямоугольной формы, снабженную клиновым (в попе- речном сечении) носком 2, расположенным в передней части рамки, и наклонный лоток 3, относительно которого происходит поступательное пере- мещение рамки под действием механизма перемещения, например силового цилиндра 4. Штанги 5, связанные шар- нирно с вьщвижной пластиной 6 и жестко между собой, приводятся в движе- ние пружиной 7, фиксация которой в сясатом положении обеспечивается зацепом 8, Фиксирование положения кулачка 9, установленного на лотке 3, обепечивает стопор 10. Отжатие зацепа 8 в момент окончания вьщвижения осуществляется с помбщью упора 11.
Рабочий орган работает следующим образом.
Рабочий орган (фиг.2) подается к штабелю, и происходит заглубление клинового носка 2 в погружаемый материал (положение материала в процессе погрузки не показано). Затем осуществляется внедрение в материал рамы 1 си- ловыми гдалиндрами 4. В начальный момент движения рамы 1 кулачок 9, положение которого фиксирует стопор 10, препятствует совместному движению штанг 5 и рамы 1. Выдвижная пластина 6 убирается, происходит сжатие пружины 7. После фиксации пружины зацепом 8 в сжатом положении (фиг.З) стопор 10 освобождает.кулачок 9, что обеспечивает совместное движение рамы 1 и штанг 5 (фиг.4), в процессе которого погружаемьм материал заполняет внутреннее пространство рамы 1. При достижении рамой 1 максимальной глубины внедрения зацеп 8 отжимается упором П . При этом пружина 7 освобождается и, воздействуя на штанги 5, выдвигает пластину 6 (фиг.З). После этого посредством цилиндра 4 рама.1.с материалом отходит назад, при этом в процессе движения захваченный материал передается на наклонньй лоток 3, а рабочий орган занимает исходное положение (фиг.6 и 2).Далее цикл повторяется .
Формула изобретения
Рабочий орган погрузочной машины, включающий соединенную с гидроцилиндром раму с клиновым носком, подвижно смонтированные внутри.рамы штанги, передняя часть которых шарнирно соединена с выдвижной пластиной, а зад-.. няя часть - с механизмом перемещения, и наклонный лоток, отличающийся тем, что, с цел ЬЮ упрощения управледия, механизм перемещения выполнен из расположенной между рамой и штангами пружины, из закрепленных на раме стопора и расположен- ного с возможностью взаимодействия со штангами зацепа, из закрепленных на лотке упора и кулачка, расположенных с возможностью их взаимодействия соответственно с зацепом и стопором.
Фиг.З
W
Фие.Г
/ / / Ю 5 7
Л
Фиг, 5
Фие.В
5 9
| Погрузочная машина | 1978 |
|
SU870311A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Рабочий орган погрузочной машины | 1983 |
|
SU1086189A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
