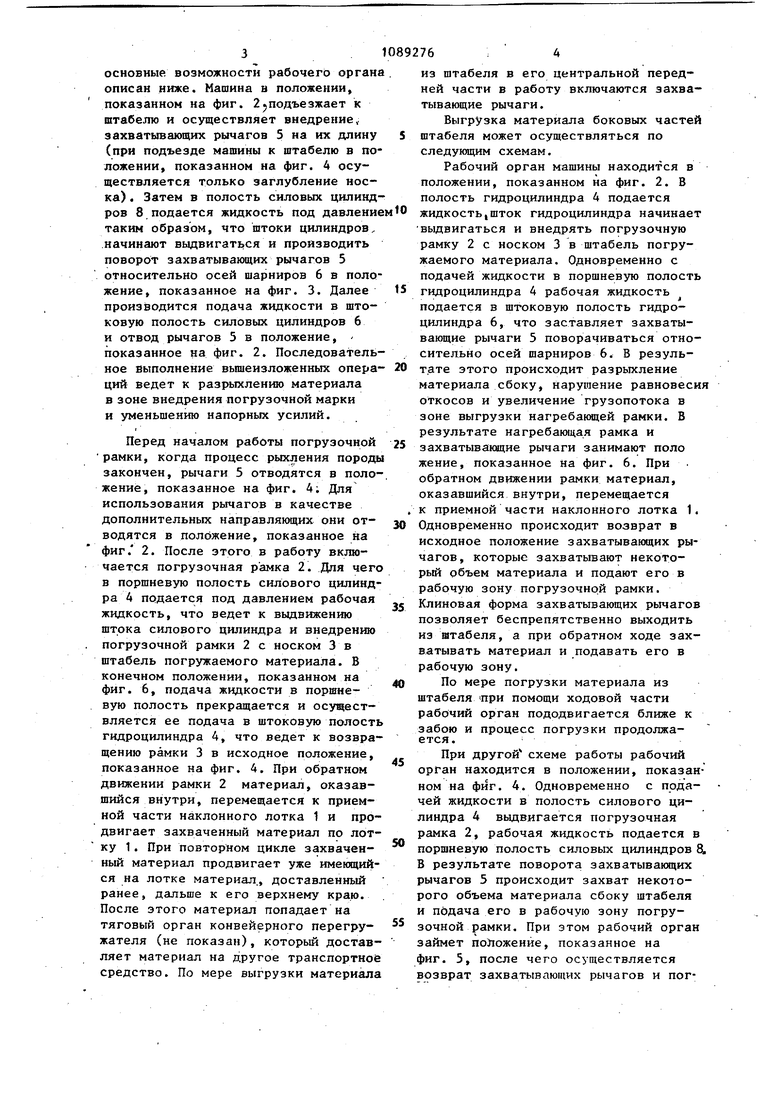
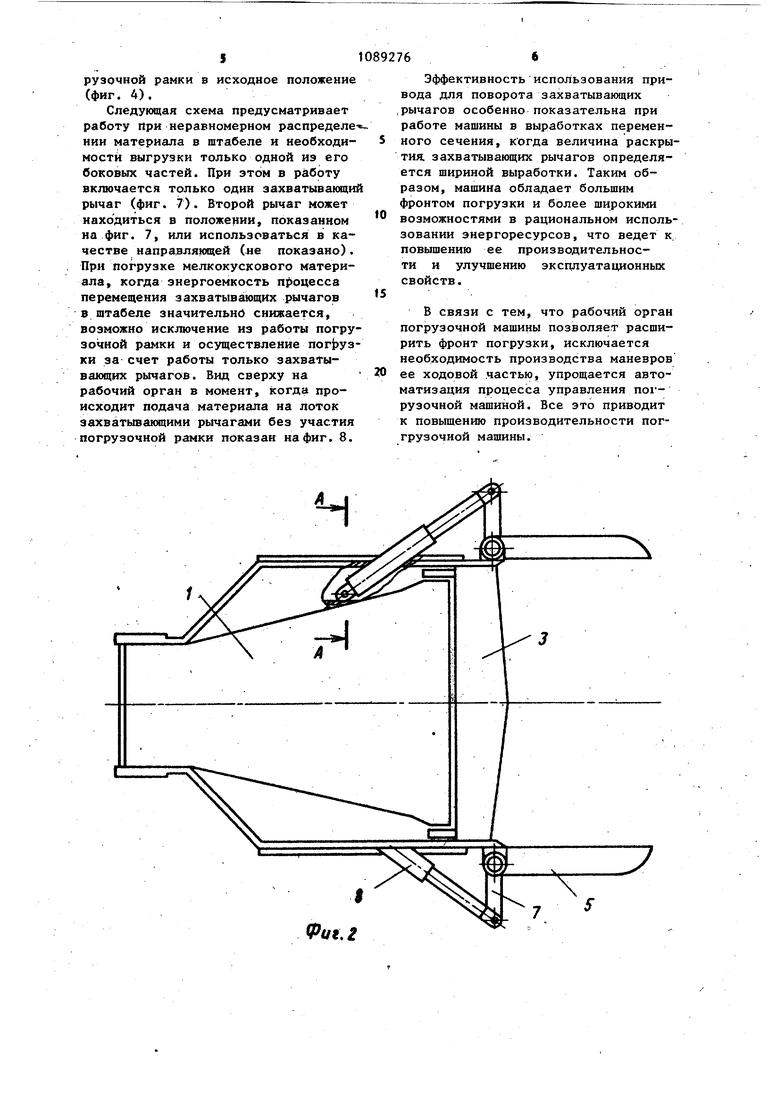
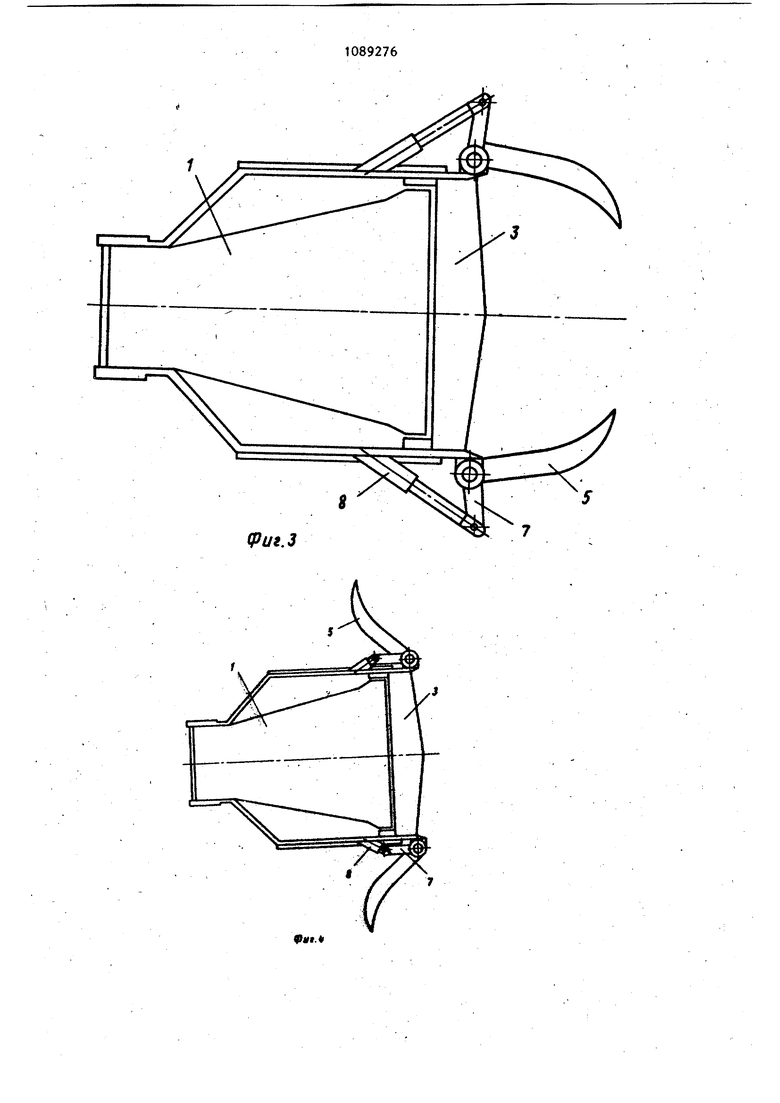
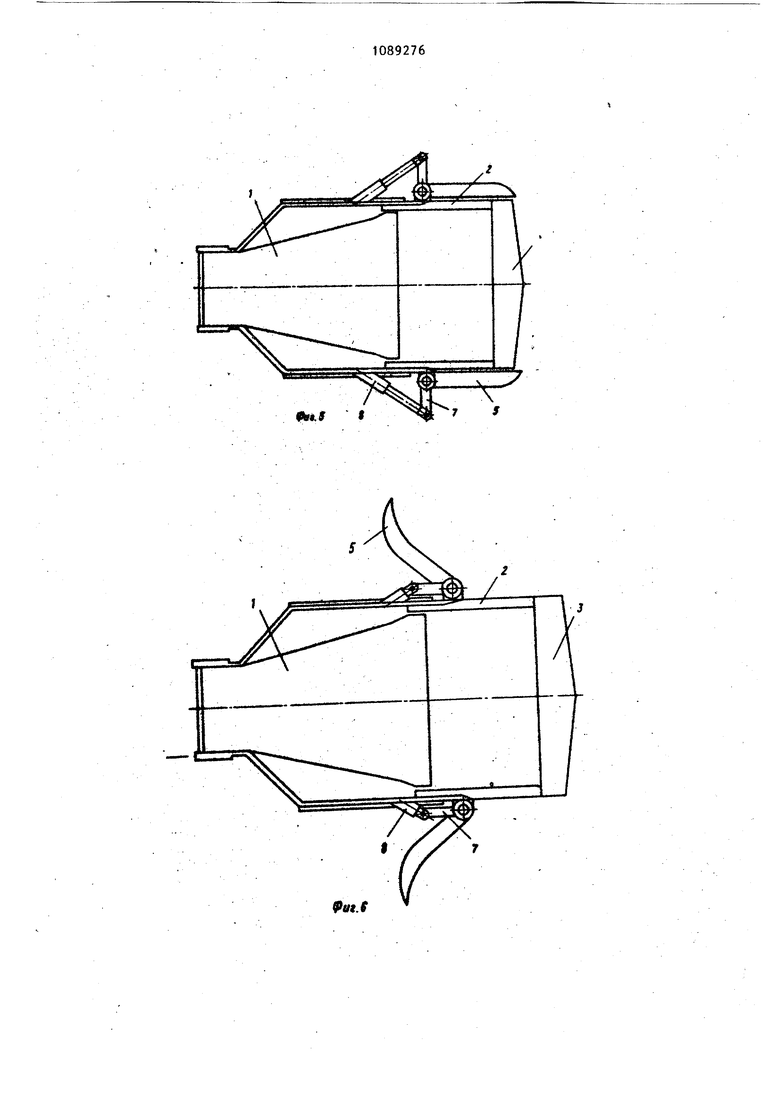
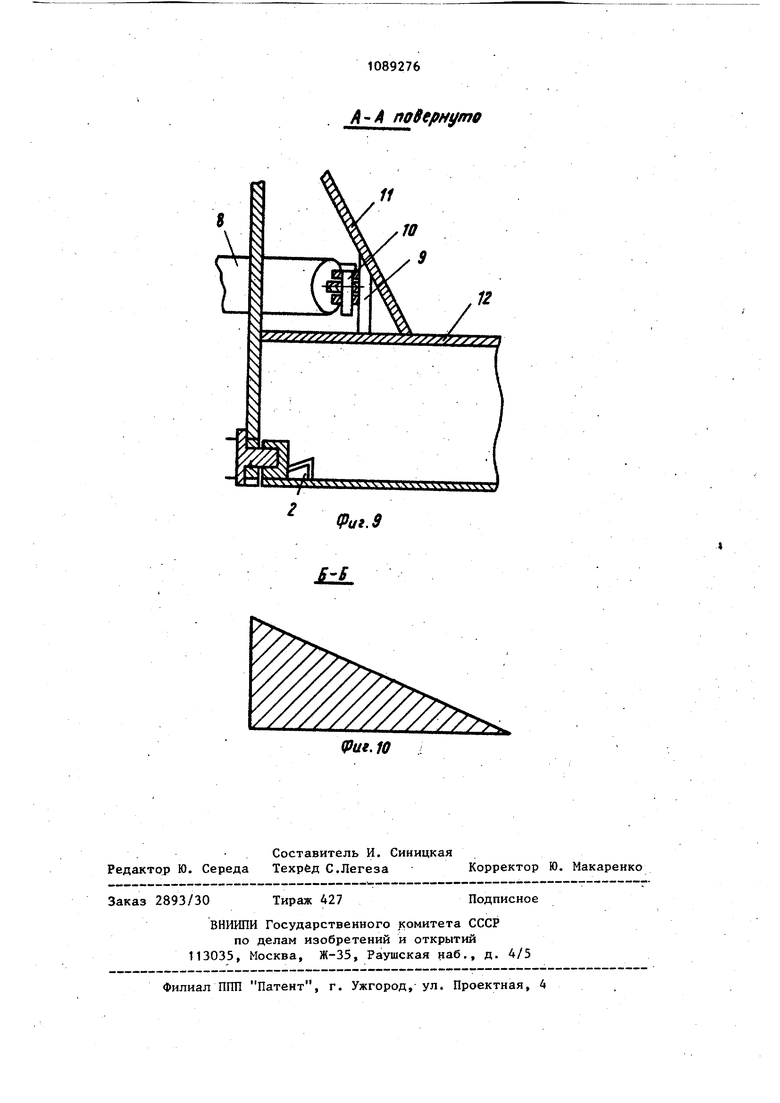
1 Изобретение относится к горному делу, в частности к погрузочным машинам для погрузки крупнокускового материала в условиях стесненных под земных выработок шахт и рудников. Известно устройство для разработ ки горных пород, содержащее шасси, конвейер, роторный погрузчик, толкающую раму с шарнирно установленными па ней лемехами с гидроцилИндрами их поворота lj . Недостатком известного устройств является неудовлетворительный захват породы. Наиболее близким к предлагаемому является рабочий орган погрузочной машины, включающий рамку с носком, наклонный лоток с захватывающимирычагами и приводом их поворота и привод перемещения рамки. Передняя кромка лотка расположена между боковыми стенками рамки. Рамка движет ся возвратно-поступательно непосред ственно на почве выработки. Во время прямого хода передняя часть рамки внедряется в штабель погружаемого материала. Погружаемый материал., оказавшийся внутри рамки при обратном ее движении перемещается к приемной части лотка и по лотку. При последующих циклах материал перемещается по лотку, попадает на перегрузочный конвейер, который погружает материал в транспортные емкости. Указанный погрузочный орган обладает высокой производительностью и пониженной энергоемкостью Недостаток заключается в сравнительно нешироком фронте погрузки горной массы. При этом возникает необходимость отвода всей машины назад, совершение маневра-поворота, подхода машины к боковой части штабеля , что приводит к уменьшению про изводительности мащины. Причем погрузка слежавшегося крупнокускового материала требует больших напорных усилий, что ведет к дополнительным энергозатратам. Цель изобретения - првьш1ение производительности, Указанная цель достигается тем, что рабочий орган погрузочной машины, включающий рамку с носком, наклонный лоток и привод перемещения рамки, снабжен захватывающими рычагами, консольно прикрепленными к лотку и расположенными в его перед76ней части с возможностью поворота в плоскости перемещения рамки, которая расположена между захватывающими рычагами. Такое выполнение рабочего органа позволяет увеличить объем погружаемого материала.j На фиг. 1 показан предлагаемый рабочий орган; на фиг. 2 - то же, вид сверху; на фиг, 3 - рабочий орган при рыхлении материала захватывакщими рычагами в зоне работы рамки, вид сверху, на фиг. 4 - выход захватывающих рычагов из штабеля, а погрузочная рамка находится в исходном положении, вид сверху, на фиг. 5 - рабочий орган погрузочной машины, когда рамка внедрена, а захватывающие рычаги используются в качестве направляющих, вид сверху, на фиг. 6 - рабочий орган, когда погрузочная рамка внедрена, а захватывающие рычаги выведены из штабеля; на фиг. 7 - рабочий орган в момент, когда производится пйдача материала из боковой части штабеля одним захватывающим рычагом, вид сверху5 на фиг. 8 - рабочий орган при погрузке мелкокускового материала в момент, когда происходит подача материала на лоток захватывающими рычагами без участия погрузочной рамки, вид сверху, на фиг« 9 сечение А-А на фиг. 2 (узел крепления дополнительных гидроцилиндров « поворота захватывающих рычагов); на фиг. 10 - сечение Б-В на фиг. 1. « г« 111 . f rf f-r-rff t - .« ..L. 4 Рабочий орган погрузочной машины включает наклонный лоток 1, погрузочную рамку 2 с треугольным (в поперечном сечении) носком 3, которая имеет привод в виде силовых цилиндров 4, закрепленных на наклонном лотке 1. Захватывающие рычаги 5 крепятся на передней части наклонного лотка шарнирами 6 и приводятся в движение через передаточньй механизм 7 от привода в виде силовых цилиндров 8, которые фиксируются в кронштейне 9 пальцем 10. Кронштейн 9 устанавливается между боковой стенкой лотка 11 и его днищем 12. Форма и расположение штабеля погружаемого материала перед рабочим органом погрузочной машины не показаны. Процесс погрузки и транспортирования материала рабочим органом может осуществляться различными вариантами. Один из них, раскрывающий основные возможности рабочего органа описан ниже. Машина в положении, показанном на фиг. 2уподъезжает к штабе.пю и осуществляет внедрение, захватывающих рычагов 5 на их длину (при подъезде машины к штабелю в положении, показанном на фиг. 4 осуществляется только заглубление носка) . Затем в полость силовых цилиндров 8 подается жидкость под давление
таким образом, что штоки цилиндров, начинают выдвигаться и производить поворот захватывающих рычагов 5 относительно осей шарниров 6 в положение, показанное на фиг. 3. Далее производится подача жидкости в штоковую полость силовых цилиндров 6 и отвод рычагов 5 в положение, показанное на фиг. 2. Последовательное выполнение вьш1еизложенных операций ведет к разрыхлению материала в зоне внедрения погрузочной марки и уменьшению напорных усилий.
Перед началом работы погрузочной рамки, когда процесс рыхления породы закончен, рычаги 5 отводятся в поло-, жение, показанное на фиг. 4; Для использования рычагов в качестве дополнительных направлякнцих они отводятся в положение, показанное на фиг. 2. После этого в работу включается погрузочная рамка 2. Для чего в поршневую полость силового цилиндра 4 подается под давлением рабочая жидкость, что ведет к выдвижению штока силового цилиндра и внедрению погрузочной рамки 2 с носком 3 в штабель погружаемого материала. В конечном положении, показанном на фиг. 6, подача жидкости в поршневую полость прекращается и осуществляется ее подача в штоковую полость гидроцилиндра 4, что ведет к возвращению рамки 3 в исходное положение, показанное на фиг. 4. При обратном движении рамки 2 материал, оказавшийся внутри, перемещается к приемной части наклонного лотка 1 и продвигает захваченный материал по лотку 1. При повторном цикле захваченный материал продвигает уже имеющийся на лотке материал., доставленный ранее, дальше к его верхнему краю. После этого материал попадает на тяговый орган конвейерного перегружателя (не показан), который доставляет материал на другое транспортное средство. По мере выгрузки материала
вьщвигаться и внедрять погрузочную рамку 2 с носком 3 в штабель погружаемого материала. Одновременно с подачей жидкости в поршневую полость гидроцилиндра 4 рабочая жидкость подается в шгоковую полость гидроцилиндра 6, что заставляет захватывающие рычаги 5 поворачиваться относительно осей шарниров 6. В результ.ате этого происходит разрыхление материала сбоку, нарушение равновеси откосов и увеличение грузопотока в зоне выгрузки нагребакицей рамки. В результате нагребающая рамка и захватывающие рычаги занимают поло жение, показанное На фиг. 6. При обратном движении рамки материал, оказавшийся внутри, перемещается к приемной части наклонного лотка 1. Одновременно происходит возврат в исходное положение захватыванмдих рычагов, которые захватывают некоторый объем материала и подают его в рабочую зону погрузочной рамки. Клиновая форма захватывающих рычагов позволяет беспрепятственно выходить из штабеля, а при обратном ходе захватывать материал и подавать его в рабочую зону.
По мере погрузки материала из штабеля при помощи ходовой части рабочий орган пододвигается ближе к
забою и процесс погрузки продолжается.
При другой схеме работы рабочий орган находится в положении, показанном на фиг. 4. Одновременно с подачей жидкости в полость силового цилиндра 4 выдвигается погрузочная рамка 2, рабочая жидкость подается в поршневую полость силовых цилиндров В результате поворота захватывающих рычагов 5 происходит захват некоторого объема материала сбоку штабеля и подача его в рабочую зону погрузочной рамки. При этом рабочий орган займет по)1оженйе, показанное на фиг. 5, после чего осуществляется возврат захватывающих рычагов и погиз штабеля в его центральной передней части в работу включаются захватывающие рычаги. Выгрузка материала боковых частей штабеля может осуществляться по следующим схемам. Рабочий орган машины находится в положении, показанном на фиг. 2. В полость гидроцилиндра 4 подается жидкость,щток гидроцилиндра начинает
рузочной рамки в исходное положение (фиг. 4).
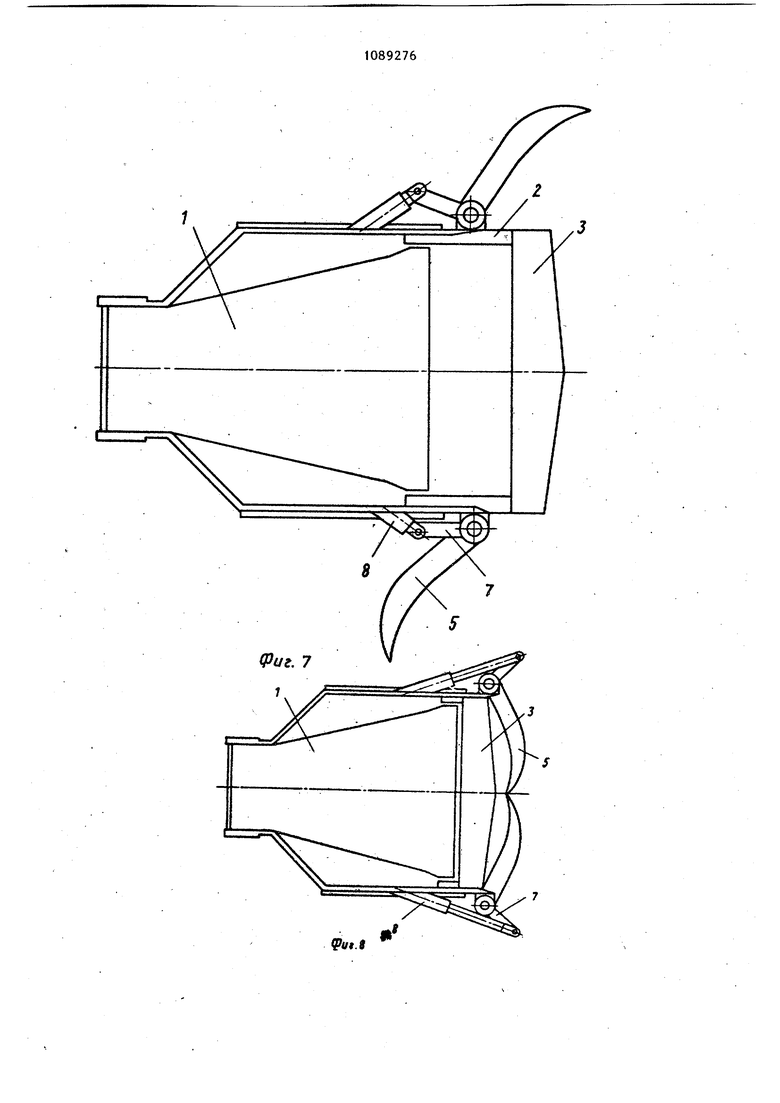
Следующая схема предусматривает работу При неравномерном распределен НИИ материала в штабеле и необходимости иагрузки только одной из его боковых частей. При этом в работу включается только один захватывающий рычаг (фиг. 7). Второй рычаг может находиться в положении, показанном на фиг. 7, или использоваться в качестве направляющей (не показано). При погрузке мелкокускового материала, когда энергоемкость процесса перемещения захватывающих рычагов в щтабеле значительна снижается, возможно исключение из работы погрузочной рамки и осуществление погЬузки за счет работы только захватывающих рычагов. Вид сверху на рабочий орган в момент, когда происходит подача материала на лоток захватывающими рычагами без участия погрузочной рамки показан на фиг. 8.
Эффективность использования привода для поворота захватывающих , рычагов особенно показательна при работе машины в выработках переменного сечения, когда величина раскрытия захватывающих рычагов определяется шириной выработки. Таким образом, машина обладает большим фронтом погрузки и более широкими возможностями в рациональном использовании энергоресурсов, что ведет к, повышению ее производительности и улучшению эксплуатационных свойств.
В связи с тем, что рабочий орган погрузочной машины позволяет расширить фронт погрузки, исключается необходимость производства маневров ее ходовой частью, упрощается автоматизация процесса управления noi- рузочной машиной. Все это приводит к повышению производительности поггрузочной машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Погрузочная машина | 1980 |
|
SU1146471A1 |
| Устройство для управления рабочим органом погрузочной машины с клиновым носком | 1981 |
|
SU1155690A1 |
| РАБОЧИЙ ОРГАН ПОГРУЗОЧНОЙ МАШИНЫ | 1997 |
|
RU2137693C1 |
| РАБОЧИЙ ОРГАН ПОГРУЗОЧНОЙ МАШИНЫ | 1997 |
|
RU2133213C1 |
| Рабочий орган погрузочной машины | 1983 |
|
SU1086189A1 |
| Рабочий орган погрузочной машины | 1986 |
|
SU1377411A1 |
| ПОГРУЗОЧНЫЙ ОРГАН | 2016 |
|
RU2619415C1 |
| Погрузочная машина | 1982 |
|
SU1082727A2 |
| Погрузочная машина | 1978 |
|
SU870311A1 |
| Погрузочная машина | 1982 |
|
SU1051019A2 |
РАБОЧИЙ ОРГАН ПОГРУЗОЧНОЙ МАШИНЫ, включающий рамку с носком, наклонный лоток и привод перемещения рамки, отличающийся тем, что, с целью повьшения производительности, он снабжен захватывакщими рычагами, консольно прикрепленными к лотку и расположенными в его передней части с возможностью поворота в плоскости перемещения рамки, которая расположена между захватывающими рычагами. § |(Л О: эо. г э О5 I и
tit.2
8
JL
К-А повернуто
12
(Pai.9
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для разработки горных пород | 1979 |
|
SU863777A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Погрузочная машина | 1978 |
|
SU870311A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| фиг.Т | |||
