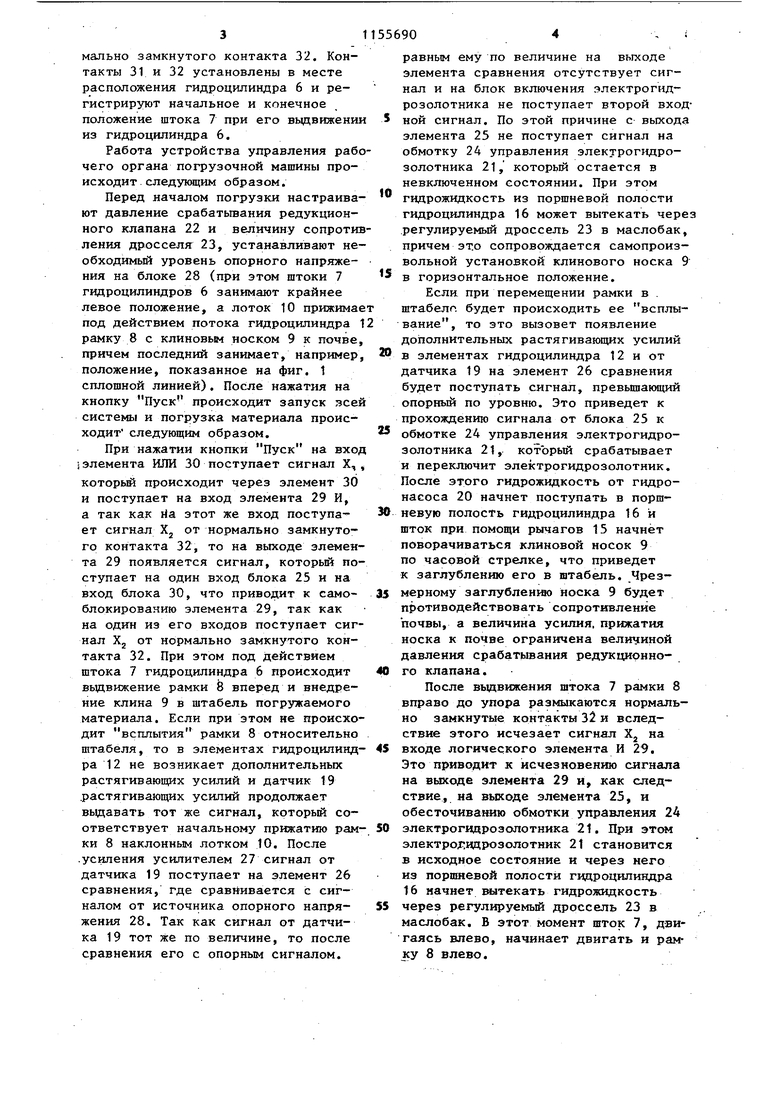
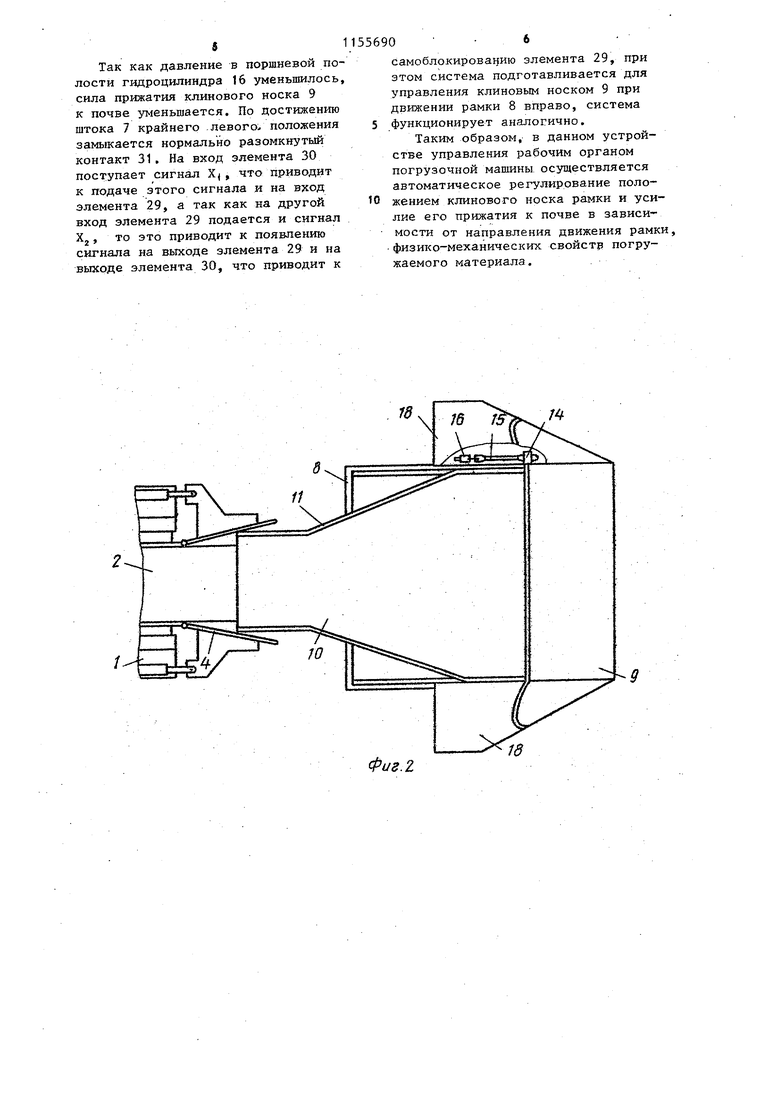
Изобретение относится к погрузочным машинам с рабочим органом ковшового типа и может применяться в горных машинах; для погрузки руды, породы, в частности крупнокусковых материалов, и подземных горных выработках шахт. Известен рабочий орган погрузочной машины, содержащий лоток с амор тизаторами и связанный с лотком клиновидный носок с вибратором l . Известно также устройство для управления рабочим органом погрузочной машины, содержащее рамку с механизмом возвратно-поступательного перемещения и носок с клиновым сечением в профиле 2j . Однако данным устройствам присуща недостаточная надежность. Цель изобретения - повьшение надежности устройства. Поставленная цель достигается тем, что устройство для управления рабочим органом погрузочной машины с клиновым носком, содержащее рамку с механизмо 4 возвратно-поступательного перемещения и носок с клиновым сечением в профиле, снабжено гидроприводом поворота носка с гидроцилин ром и электрогидрозолотником с включающей катушкой, блоком включения, элементом сравнения, источником опор ного напряжения, датчиком растягиваю цих усилий, усилителем, элементами И и ИЛИ, причем датчик растягивающих усилий через усилитель соединен с одним из входов элемента сравнения, другой вход которого соединен с источником опорного напряжения, а выход - с одним из входов блоков включения, другой вход которого соединен с выходом элемента И, один из входов которого соединен с выходом элемента ИЛИ, а другой с входной клеммой Конечное положение, выход элемента И соединен с первьм входом элемента ИЛИ, второй и третий входы которого соединены с входньми клеммами соответственно Начальное поло жение и Пуск, а выход блока вклю чения соединен с включающей катушкой электрозолотника. На фиг, 1 изобраткен в разрезе ра бочий орган погрузочной машины в положении, когда рамка перед вкедрекием в штабель погружаемого материала, а клиновая передняя часть рамквд занимает крайнее верхнее положение. вид сбоку; на фиг. 2 - рабочий орган погрузочной машины, вид сверху; на фиг. 3 - функциональная злектрогидравлическая схема устройства управления рабочим органом погрузочной машины. Устройство управления рабочим органом погрузочной машины состоит из ходовой части 1, на которой установлен конвейерный перегружатель 2, расположенный в корпусе 3 с поворотными отражателями 4. Впереди ходовой части па кронштейне 5 установлены гидроцилиндры 6 со штоками 7 для перемещения рамки 8 с подвижным клиновым носком 9 в сторону штабеля (не показан) вцраво и в обратную сторону к наклонному лотку 10 с бортами 11, который прижимается сам к рамке 8 и прижимает последнюю к почве при помощи гвдроцилиндра 12. В передней части рамки 8 прикреплены щечки 13, в которых может поворачиваться ось 14, жестко соединенная с клиновьм носком 9, под действием рычагов 15 связанных с гидроцилиндрами Т6, укрепленными на щеках 17, закрепленных в передней части рамки 8. Позади подвижного клинового носка 9 расположены клиновые крылья 18. Между наклонным лотком 10 и штоком гидроцилиндра 12 установлен датчик 19 растягиванядих усилий. Гндроцилиндр 16 (фиг. 3) получает питание рабочей жидкостью от гидронасоса 20 через электрогидрозолотник 21, на нагнетательной линии которого установлен редукционный клапан 22, на сливной линии - регулируемьй дроссель 23. Обмотка 24 управления электрогидрозолотника 21 получает питание от блока 25 включения злектрогидрозолотника , на один вход которого подается сигнал от элемента 26 сравнения, сравнивающего сигнала от датчика 19, усиленньй усилителем 27, с сигналом от источника опорного напряжения 28. На другой вход блока 25 поступает сигнал с логического элемента И 29 и логического элемента ИЛИ 30, соединенных мечяу собой последовательно и охваченных, обратной связью. На вход элемента ИЛИ может подаваться сигнал X, от кнопки Пуск (не показана) и сигнал Xf от нормально разомкнутого контакта 31, а на вход элемента И - сигнал Х от нормально замкнутого контакта 32. Контакты 31 и 32 установлены в месте расположения гидроцилиндра 6 и регистрируют начальное и конечное положение штока 7 при его вьадвижении из гидроцилиндра 6.
Работа устройства управления рабочего органа погрузочной машины происходит . следующим образом.
Перед началом погрузки настраивают давление срабатьшания редукционного клапана 22 и величину сопротивления дросселя 23, устанавливают необходимый уровень опорного напряжения на блоке 28 (при этом штоки 7 гидроцилиндров 6 занимают крайнее левое положение, а лоток 10 прижимае под действием потока гидроцилиндра 1 рамку 8 с клиновым носком 9 к почве, причем последний занимает, например, положение, показанное на фиг. 1 сплошной линией). После нажатия на кнопку Пуск происходит запуск зсей системы и погрузка материала происходит следующим образом.
При нажатии кнопки Пуск на вход 5 элемента ИЛИ 30 поступает сигнал X,,
которьй происходит через элемент 30 и поступает на вход элемента 29 И, а так как ria этот же вход поступа-ет сигнал Х от нормально замкнутого контакта 32, то на выходе элемента 29 появляется сигнал, который поступает на один вход блока 25 и на вход блока 30, что приводит к самоблокированию элемента 29, так как на один из его входов поступает сигнал Xg от нормально замкнутого контакта 32. При этом под действием штока 7 гидроципиндра 6 происходит вьщвижение рамки 8 вперед и внедрение клина 9 в штабель погружаемого материала. Если при этом не происходит всплытия рамки 8 относительно штабеля, то в элементах гидроцилиндра 12 не возникает дополнительных растягивающих усилий и датчик 19 .растягивающих усилий продолжает выдавать тот же сигнал, который соответствует начальному прижатию рамки 8 наклонным лотком 10. После .усиления усилителем 27 сигнал от датчика 19 поступает на элемент 26 сравнения, где сравйивается с сигналом от источника опорного напря- жения 28. Так как сигнал от датчика 19 тот же по величине, то после сравнения его с опорным сигналом.
равным ему по величине на выходе элемента сравнения отсутствует сигнал и на блок включения электрогидрозолотника не поступает второй входной сигнал. По этой причине с выхода элемента 25 не поступает сигнал на обмотку 24 управления электропщрозолотника 21, который остается в невключенном состоянии. При этом гидрожидкость из поршневой полости гидроцилиндра 16 может вытекать чере регулируемьй дроссель 23 в маслобак причем это сопровождается самопроизвольной установкой клинового носка 9 в горизонтальное положение.
Если при перемещении рамки в . штабело будет происходить ее всплывание, то это вызовет появление дополнительных растягивающих усилий в элементах гидроцилиндра 12 и от датчика 19 на элемент 26 сравнения будет поступать сигнал, превышаииций опорный по уровню. Это приведет к прохождению сигнала от блока 25 к обмотке 24 управления электрогидрозолотника 21, который срабатывает и переключит электрогидрозолотник. После этого гидрожидкость от гидронасоса 20 начнет поступать в поршневую полость гидроцилиндра 16 и шток при помощи рычагов 15 начнёт поворачиваться клиновой носок 9 по часовой стрелке, что приведет к заглублению его в штабель. Чрезмерному заглубленмо носка 9 будет противодействовать сопротивление почвы, а величина усилия, прижатия носка к почве ограничена величиной давления срабатывания редукционного клапана.
После выдвижения штока 7 рамки 8 вправо до упора размыкаются нормально замкнутые контакты 32 и вследствие этого исчезает сигнал Х на входе логического элемента И 29. Это приводит к исчезновению сигнала на выходе элемента 29 и, как следствие, на выходе элемента 25, и обесточиванию обмотки управления 24 электрогидрозолотника 21. При этом электрод вдрозолотник 21 становится в исходное состояние и через него из поршневой полости гидроцилиндра 16 начнет вытекать гидрожидкость через регулируемый дроссель 23 в маслобак. В этот момент шток 7, двигаясь влево, начинает двигать и рамку 8 влево.
5
Так как давление в поршневой полости гидроцилиидра 16 уменьшилось сила прижатия клинового носка 9 к почве уменьшается. По достижению штока 7 крайнего левого/ положения замз1кается нормально разомкнутый контакт 31, На вход элемента 30 поступает сигнал Х(, что приводит к подаче этого сигнала и на вход элемента 29, а так как на другой вход элемента 29 подается и сигнал Х, то это приводит к появлению сигнала на выходе элемента 29 и на выходе элемента 30, что приводит к
55690 - 6
Самоблокированию элемента 29, при этом система подготавливается для управления клиновым носком 9 при движении рамки 8 вправо, система 5 функционирует аналогично.
Таким образом, в данном устройстве управления рабочим органом погрузочной машины осуществляется автоматическое регулирование положением клинового носка рамки и усилие его прижатия к почве в зависимости от направления движения рамки, физико-механических свойств погружаемого материала.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОГРУЗОЧНЫЙ ОРГАН | 2016 |
|
RU2619415C1 |
| Погрузочная машина | 1980 |
|
SU1146471A1 |
| Рабочий орган погрузочной машины | 1983 |
|
SU1089276A1 |
| Рабочий орган погрузочной машины | 1983 |
|
SU1086189A1 |
| Погрузочная машина | 1978 |
|
SU870311A1 |
| РАБОЧИЙ ОРГАН ПОГРУЗОЧНОЙ МАШИНЫ | 1997 |
|
RU2133213C1 |
| РАБОЧИЙ ОРГАН ПОГРУЗОЧНОЙ МАШИНЫ | 1997 |
|
RU2137693C1 |
| Устройство для управления механизмом подачи погрузочной машины непрерывного действия | 1981 |
|
SU1036861A2 |
| Рабочий орган погрузочной машины | 1986 |
|
SU1377411A1 |
| Устройство для управления механизмом подачи погрузочной машины непрерывного действия | 1980 |
|
SU956710A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ПОГРУЗОЧНОЙ МАИМНЫ С КЛИНОВЫМ НОСКОМ, содержащее рамку с механизмом возвратно-поступательного перемещения, отличающе еся тем, что, с целью повышения надежности устройства, оно снабжено /2 гидроприводом поворота носка с гид- .роцилиндром и электрогидрозолотником с включающей катушкой, блоком включения, элементом сравнения, источником опорного напряжения, датчиком растягивающих усилий, усилителем, элементами И и ИЛИ, причем датчик растягивающих усилий через усилитель соединен с одним из входов элемента сравнения, другой вход которого соединен с источником опорного напряжения, а выход - с одним из входов блока включения, другой вход которого соединен с выходом элемента И, один из входов которого соединен с выходом элемента ИЛИ, а другой с входной клеммой Конечное положение , выход элемента И соединен с первьи-i входом элемента ИЛИ, второй и третий входы которого соединены с входными клеммами соответственно Начальное положение и Пуск, а выход блока включения соединен с включающей катушкой электрогидрозолотника. V 7 6 52 Г6 17 f5 аг. i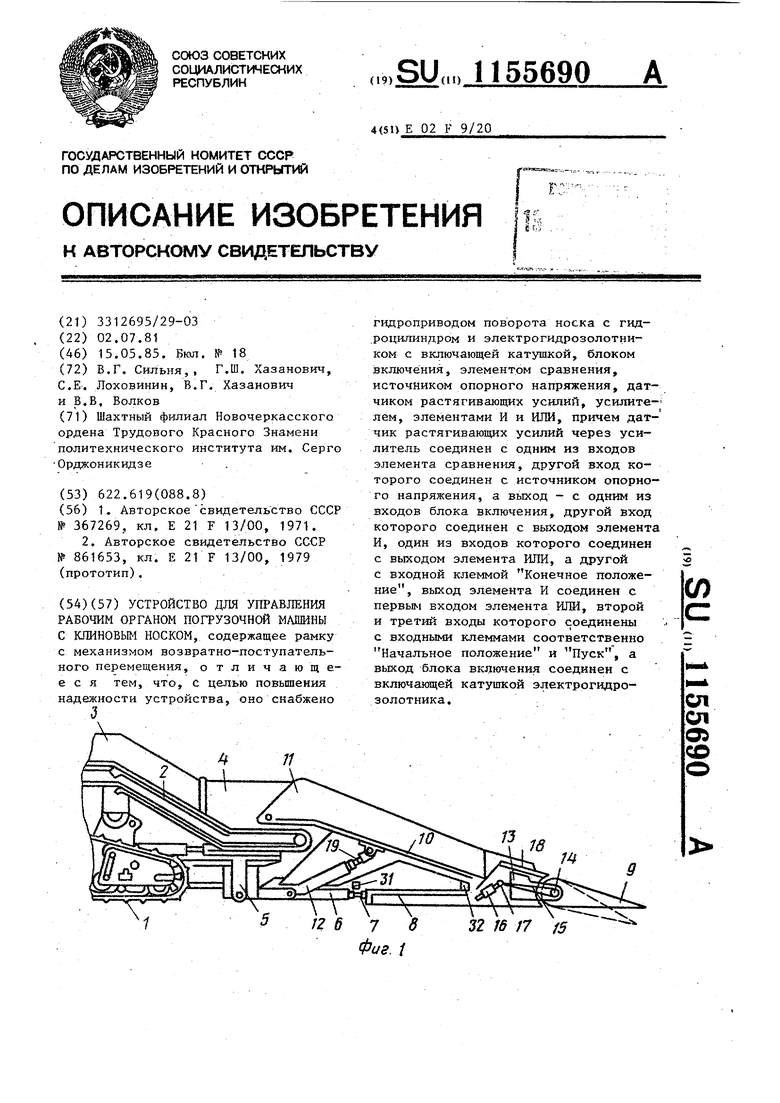
Фиг. 2
fL/
-. ч
J ,
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ПОГРУЗОЧНЫЙ ОРГАН | 0 |
|
SU367269A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Погрузочный рабочий орган | 1979 |
|
SU861653A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
