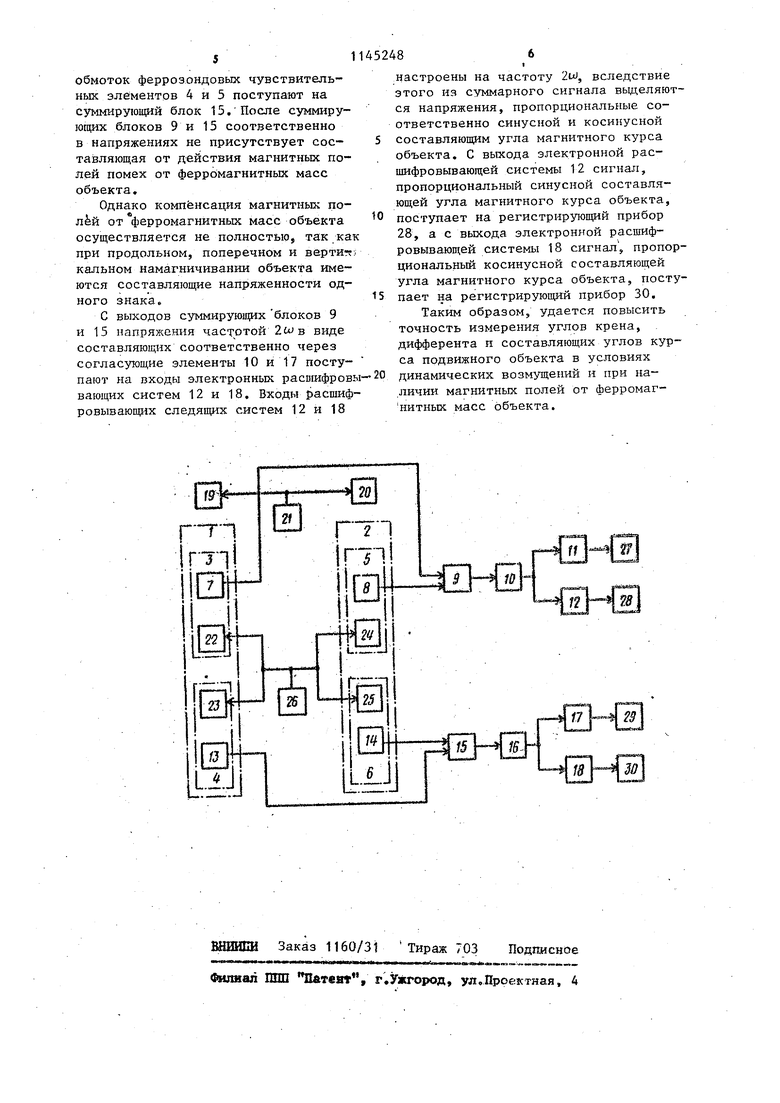
Изобретение относится к навигаинолному приборостроению. Известно устройство, содержащее соленоид, преобразователь магнитного курса и следящие системы углов поворота C13. Недостатком этого устройства является низкая точносттэ измерения. Наиболее близким к изобретению я-вляется устройство, содержащее пре образователь магнитного курса с фер розондовыми чувствительными элементами, обмотки возбучодения которых подключены к генератору возбуждения соленоид, подключенный к генератору опорного поля, первук), вторую, треть и четвертую электронные расшифровывающие системы, соединенные соответ ственно с первым, BTopt iM, третьим и четвертым регистрируюи1;11ми составляюпотх углов поворота С2 . Недостатком такого устройства является низкая точность определения углов поворота объекта. Цель изобретейия - повьштение точ нос ти из мер е НИИ. Поставленная цель достигается тем, что в устройство, содержащее первый преобразователь магнитного курса с nepBbUvi и вторым феррозондовыми чувствительными элементами, об мотки возбулсдения которых подключены к генератору возбуждения, первый соленоид, подключенньш к генератору опорного поля, первую, вторую, третью п четвертую электронные расшифровывающие системы, соединенные соответственно с первьм, вторым, третьим и четвертым регистрирующими приборами составляющих углов поворота, введены второй преобразователь магнитного курса с двумя феррозон/1,овь1ми чувствительными элементами, обмотки возбуждения которьпс подключены к генератору возбуждения, второй соленоид, подключенный к генератору опорного поля, первый и второй сум шрующие блоки, первый и второй согласующие элементы, при этом сигнальные обмотки первых чувствительнык элементов первого и второго преобразователей магнитного курса соединены соответственно с первым и вторым входами ,первого суммирующего блока, выход которого через первый согласующий элемент подключен одновременно к входам первой-и второй электронных расшифровывающих систем, а сигналь- ные обмотки вторых. чу&ствительнь1х: элементовтех же преобразователей магнитного курса соединены соответственно с первым и вторым входами второго суммирующего блока, выход которого через второй согласующий элемент подключен одновременно к входам третьей и четвертой электронных расшифровывающих систем, причем обмотки возбуждения первого и второго феррозондовых чувствительных элементов второго, преобразователя магнитного курса подключены к генератору возбуждения. Кроме того, первый преобразователь магнитного курса с первым со|леноидом установлен по одну сторону от продольной и поперечной осей объекта, а второй преобразователь aгнитного курса с вторым соленоидом установлен по другую сторону от продольной и поперечной осей объекта, на одинаковых расстояниях от этих осей. На чертеже схематически показав предлагаемый измеритель. Измеритель содержит первый I и второй 2 преобразователи магнитного курса с входящими в них феррозондовыми чувствительными элементами 3,4 и 5,6. Сигнальные обмотки 7 и 8, феррозондовых чувствительных элементов 3 и. 5 через сз/ммирующий блок 9 и согласующий элемент 10 подключены к входам первой и второй электронньк расшифровывающих систем 11 и 12. Сигнальные обмотки 13 и 14 феррозондовых чувствительных элементов 4 и 6 через суммируюир й блок 15 и согласующий элемент 16 подключены к входам третьей и четвертой электронных расшифровывающих систем 17 и 18, Обмотки соленоидов 19 и 20 подключены к генератору опорного поля 21 „ Обмотки возбуждения 22,23 и 24, 25 феррозондовых чувствительных элементов 3,4 и 5,6 подключены к генератору возбуждения 26, Выходы первой и второй расигифровывающих систем 11 и 12 подключены к регистрирующим приборам 27 и 28, а третьей и четвертой расшифровывающих систем 17 и 18 к регистрирующим приборам 29 и 30. Измеритель составляющих углов поворота подвижного объекта работает следующим образом. Преобразователь ма1нитно1 о курса 1 с соленоидом 19.и преобразователь I магнитного курса 2 с соленоидом 20 устанавливаются на подвижном объект (например, судне) но разные стороны на равных удалениях относительно нр ,дольной оси и на равных удалениях относительно поперечной оси объекта точка пересечения которых центр, вокруг которого происходит качка объекта. На обмотки 22, 23 и 24, 25 феррозондовых чувствительных элементов 3,4 и 5,6 подается напряжение от генератора возбуждения 26 частотой W. На обмотки соленоидов 19 и 20 подается напряжение от тенератора опорного поля 21 частотой Я. Соленоиды 19 и 20 установлены на объекте так, что векторы напряженности Ч и и магнитных полей параллел ны нормальной оси объекта. При отсутствии крена у и дифферента объекта векторы Н и . вертикальны Поскольку феррозондовые чувс-твитель ные элементы 3,4 и 5,6 стабилизированы в плоскости горизонта маятниковым подвесом, то при наличии угло - и V oiffl сохраняют горизонтальное положение, а векторы отклоняются на эти углы от вертикальной оси. При Зтом вектор Ч проектируется на оси чувствительности феррозондовых чувствительных элементов 3 и 4, а нектор Vj проектируется на оси чувствительности феррозондовых чувствительных элементов 5 и 6 в виде составляющих для ФЧЭ 3; Н,1 - , Sin у для ФЧЭ 4; Hi V, SinVCOS для ФЧЭ 5; для ФЧЭ 6 si VcosjПри наличии динамических возмущений объекта (например, бортовая или килевая качка судна на волнении на маятниковые подвесы преобразователей магнитного курса 1 и 2, действуют силы, вызывающие их отклонения от вертикали на углы, йу и ДУ . Отклонения маятниковых подвесов преобразователей магнитного курса 1 и 2, установленных на .равных расстояниях по разные стороны от продольной и поперечной осей объекта, близки по величине и противоположны по знаку. Напряжения частотой S1 несут информацию об углах крена и дифферента в выходных сигналах феррозонде- 84 вых. чувствительных элементов 3,4 и 5,6. С выходов сигнальных обмоток 7 и 8 феррозондовых чувствительных элементов 3 и 5 напряжения частотой и поступают на суммирующий блок 9, С выходов сигнальных обмоток 13 и 14 феррозондовых чувствительных элементов 4 и 6 напряжения частотой Я поступают на суммирующее устройство. После суммирующих элементов 9. и 15 соответственно напряжения частотой 5 не содержат составляющих от углов отклонения маятниковых подвесов преобразователей магнитного курса 1 и 2 за счет динамических возмущений. С выходов суммирующих устройств 9 и 15 соответственно напряжения поступают на согласующие элементы 10 и 16, назначение которых согласовать выходы суммирующих устройств 9 и 15 соответственно с входами электрон- ных расшифровывающих систем 11 и 17. Входы электронных расшифровывающих систем 11 и 17 настроены на частотуS7, вследствие этого из суммарного выходного сигнала вьщеляются напряжения, пропорциональные соответственно глам крена и дифферента объекта. С выхода электронной расщифровывающей системь 11 сигнал, пропорциональный углу крена объекта, поступает на вход регистрирующего прибора 27, ас выхода электронной расшифровывающей системы 17 сигнал, пропорциональный углу дифферента объекта, поступает на вход регистрирующего прибора 29« Процесс компенсации ошибки измерения составляющих угла курса К-от воздействия на феррозондовые чувствительные элементы магнитных полей помех от ферромагнитных масс объекта протекает следующим образом. Напряжения второй гармоники частотой 2uJ пропорциональны 81пКи cosK в выходном напряжении феррозон- довых чувствительных элементов 3,5 и 4,6. Напряжения второй гармоники частотой 2LO в выходной ЭДС с сигнальных обмоток феррозондовых чувствительных элементов 3и 5 поступают на суммирующий блок 9. Напряжения второй гармоники частотой 2ю в .выходной ЭДС с сигнальных обмоток феррозондовых чувствительных элементов 4 и 5 поступают на суммирующий блок 15.После суммируЮ1ЧИХ блоков 9 и 15 соответственно в напряжениях не присутствует составляющая от действия магнитных полей помех от ферромагнитных масс объекта. Однако компенсация магнитных от ферромагнитных масс объекта осуществляется не полностью, так ка при продольном, поперечном и верти кальном намагничивании объекта имеются составляющие напряженности одного знака. С выходов суммирующих блоков 9 и 15 напряжения частотой 2wв виде составляющих соответственно через согласующие элементы 10 и 17 поступают на входы электронных расвшфров вающих систем 12 и 18, Входы расшиф ровывающих следящих систем 12 и 18 настроены на частоту 2ui, вследствие этого из суммарного сигнала выделяются напряжения, пропорциональные соответственно синусной и косинусной составляющим угла магнитного курса объекта, С выхода электронной расшифровывающей системы 12 сигнал, пропорциональный синусной составляющей угла магнитного курса объекта, поступает на регистрирующий прибор 28, а с выхода электронной расшифровывающей системы 18 сигнал , пропорциональный косинусной составляющей угла магнитного курса объекта, поступает на регистрирующий прибор 30, Таким образом, удается повысить точность измерения углов крена, дифферента и составляющих углов курса подвижного объекта в условиях динамических возмущений и при на.личии магнитных полей от ферромагнитных масс объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Измеритель углов поворота подвижного объекта | 1984 |
|
SU1186948A1 |
| Устройство для определения азимута | 1986 |
|
SU1377586A1 |
| Устройство для определения азимута | 1986 |
|
SU1377585A1 |
| Феррозондовый компас | 1983 |
|
SU1081418A1 |
| Способ измерения магнитного курса подвижного объекта и устройство для его осуществления | 2017 |
|
RU2653599C1 |
| УСТРОЙСТВО БЕСКОНТАКТНОГО МАГНИТОМЕТРИЧЕСКОГО КОНТРОЛЯ СОСТОЯНИЯ МЕТАЛЛА ТРУБОПРОВОДА | 2011 |
|
RU2460068C1 |
| Устройство для измерения магнитного курса | 1978 |
|
SU787896A1 |
| НАВИГАЦИОННЫЙ ТРЁХКОМПОНЕНТНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2020 |
|
RU2730097C1 |
| Феррозондовый компас | 1977 |
|
SU679797A1 |
| ЦИФРОВОЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2013 |
|
RU2549545C2 |
1. ИЗМЕРИТЕЛЬ СОСТАВЛЛЮЩИХ УГЛОВ ПОВОРЙТА ПОДВИЖНОГО ОБЪЕКТА, содержащий первый преобразователь магнитного курса с первым и феррозондовыми чувствительнь1ми элементами, обмотки возбуж,цения которых подключены к генератору возбл ждения, первый соленоид, подключенный к генератору опорного поля, первую, вторую, третью и четвертую электронные распшфровываюшле систеьт, соединенные соответственно с первьв-}, вторым, третьим и четвертым регистрирующими приборами составляющих углов поворота, отличающийся тем, что, с целью повышения точности измерения, в него дополнительно введены второй преобразователь магнитного курса с двумя феррозондовыми чувствительными элементами, обмотки возбуждения которых подключены к генератору возбуждения, второй соленоид, подключенный к генератору опорного поля, первый и второй суммирующие блоки, первый и второй согласующие элементы, при этом сигнальные обмотки первых чувствительных элементов, первого и второго преобразователей магнитного курса соединены соответственно с первым и вторым входами первого суммирующего блока, выход которого через первый согласующий элемент подключен одновременно к входам первой и второй электронных расшифровывающих систем, а сигнальные обмотки вторых чувствительных улементов тех же преобразователей магнитного курса соединены соответстi венно с первым и вторым входами второго суммирующего блока , выход которого через второй согласующий элемент подключен одновременно к входам третьей и четвертой электронных расшифровывающих систем, причем обмотки возб ткдения первого и второго феррозондовых чувствительных элементов второго преобразователя MarfHiTHoro курса подключены к гене01 ратору возбуждения. to 2. Измеритель по п. 1, отличающийся тем, что первьй преобразователь магнитного курса с первым соленоидом установлен по одну сторону от продольной и поперечной осей объекта, а второй преобразователь магнитного курса с вто рым соленоидом установлен по другую сторону от продольной и поперечной осей объекта на одинаковых раестоя- ниях от этих осей.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Измеритель углов поворота подвижного объекта | 1972 |
|
SU459670A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 1056709, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
