Изрбретение относится к навигационному приборостроению, в частности к системам определения магнитного курса, крена и тангажа (дифферента) подвижных объектов,
-Наиболее близким к изобретению техническим решением, принятым в качестве прототипа, является измеритель углов ориентации подвижного объекта, который содержит .чувствительные элементы: первый ф рромодуляционный преобразователь (ФМП) и первый линейный акселеро метр, второй фёрромодуляционный преобразователь, третий ферромодуляционный преобразователь, три регистратора выходной информации и вычислитель. Вычислитель
включает в свой состав блоки вы чйс/ ения крена, тангажа и магнитного курса. Блоки вычисления крена и тангажа реализованы э виде аналоговых электромеханических, вычислителей, содержащих синусно-косинуй- ные вращающиеся трансформаторы, усилители и двигатели. Блок вычисления магнитного курса включает в свой состав три синусно-косинусных вращающихся трансформатора, усилитель и двигатель. Второй и третий линейнь;е акселерометры измерителя подключены к соответствую щим входам блока вычисления крена, который первым выходом соединен с регистратором крена и первым входом блока вычисления магнитного курса, а вторым
vi ю
СА) N3 N) 00
выходом - с одним из входов блока вычисления тангажа. Другой вход блока вычисления тангажа подключен в первому линейному акселерометру, а выход- к регистратору тангажа и второму входу блрка вычисления магнитного курса. Третий, четвертый и пятый входы последнего соединены соответственно с первым, вторым и третьим ферромодуляционным преобразователем, а выход подключен к регистратору магнитного курса,.- ; -При движении подвижного объекта ли- Нфйный акселерометр измеряет кажущие скорения в соответствии с выражением с учетрм (5,2)..:... ;: ; ;....;.; ;
(tfVd) о)
.;.. - : .-. Л11-.;...:.-....-;.:-: ,: где V..- вектор скорости поступательного
движения места установки ЛА относительно Земли; У- вектдр абсолютной угловой скорости объекта; V - век|ор угловой скорости
вращения Земли; - локальная производная вектора V ; cf- векторускорения си- лы тяЖё сти. ;. -..-Л:. /:;:.-... ;..;... . ;
При этом для движения многих подвижных объектов (летательных аппаратов (ЛА), буксируемых гидрофизических станций и .) характерно:выполнение неравенств V« И и Vy, Vx, Vz(y,x,z - продольная, поперечная, нормальная оси объекта). Учитывая это, и на основании выражения (1) выходные
сигналы первого, второго и третьего Л А измерителя можно представить в следующем виде: :
Зу g sin V+
d Vv dt
dVx
ax - -. g sin у cos V + --- - Vy a
dt gcos у COS V + r + Vy ah, (2)
где Oh - проекция вектора Ј5 на нормальную ось объекта;
Vi (,x,z) - проекции вектора V на продольную, поперечную м нормальную оси объекта.
Тангаж V и крен у объекта в измерителе определяются вычислителями на основании показаний Л А по формулам сботйетственно
20 ч, :-- . :-я
y arctg( Эх);
: - .- ... az
az
V arctg (----2---) м ... .. vazcosy- ax slnyy
(3)
Измеренные значения крена уп и тангажа Уп объекта описываются следующими выражениями (с учетом выражения (2)):
g sin у cos V----+Vua z у, arctg.--------fi ---- ;g cos у cos V +-тр + Vy ft
y + Ay;- ;.; -; .(4)


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения азимута | 1986 |
|
SU1377586A1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2502050C1 |
| Устройство для определения азимута | 1986 |
|
SU1377585A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2594631C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАТЧИКОВ СИСТЕМЫ УПРАВЛЕНИЯ ПОДВИЖНОГО АППАРАТА | 2012 |
|
RU2493578C1 |
| УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2536365C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ГОРИЗОНТАЛЬНОЙ ОРИЕНТАЦИИ АППАРАТА | 2007 |
|
RU2373562C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2563326C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2001 |
|
RU2197714C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550161C1 |
Использование: в навигационном при- б ростроении, в частности в системе опре- де ления магнитного курса, крена и тангажа подвижных объектов. Сущность изобрете- т|я: в измеритель введены измеритель линейной скорости, первый и второй измерители угловой скорости, установленные соответственно по продольной, поперечной и нормальной осям объекта, два пе- рёмнржителя, четыре алгебраических сумматора, интегратор и низкочастотный фильтр. При этом первый и второй измерители угловой скбрости соедйнены с первыми входами соответственно первого и второго перемножителей, вторые входы которых подключены к измерителю линейной скорости, а их выходы - к первым входам соответственно первого и второго сумматоров, соединенных вторыми входами соответственно с третьим и вторым акселерометрами и выходами с входами блока вычисления крена. Блок вычисления магнитного курса соединен через третий сумматор, фильтр и четвертый сумматор с регистратором магнитного курса, при этом ; второй измеритель угловой скорости соеди- нен через интегратор с другими входами третьего и четвертого сумматоров. 2 ил. С/) С
:л :-г:;-;.:;:;,;- ,.; . ..,; gsinv+- :., ::;-:. . : .. -.
Vn - afctg ---:--- rju---- V :.- - ;.; -- d L -- -:--- --
(gcosycosV+ + vy ojx) oos(y + Ду) + (gsiny .oxV-- + vy at) sin(y + Ay)
.-... / /: :- :;:;- -;..; Vj,;. ... - -;-;: ,.. - ,--: :. . - ; ... - -
Из формул (2) и (4) видно, что крен: и тангаж в измерителе определяются с по- грешностями Ay, A V, вызванными двйж е- нием объекта; ;., ::. v ..;.:. . : ; .. Магнитный курс объекта в измерителе опреде; путем вычисления на основании сигналов с ФМП и информации об углах отклонения объ- екта Ьт плоскости горизонта в следующем виде:
К -. -.- - .- -..-..... .;- . , . - - . - ..-- -.: .- -. .; М ...
-rrta-(Txcosy + Tzslny)
у (Тх sin у-Tz cos у) sin V + Ту cos V
Кми arctg
-Txcos(y + Ay)+Tzsrn(y + Ay). Тх sin (у + Ay) - Tz cos (у + Ay) sin (V + A V) + Ty cos (V + A V)
Магнитный курс объекта также опреде-Целью изобретения является повыше- ляется с погрешностью А К-м. ние динамической точности измерения уггде Ту.Тх и Tz - выходные сигналы первого, второго и третьего ФМП.
Точность определения измерителем магнитного курса подвижного объекта ограничена его погрешностями в определении тангажа и крена объекта. На основании формулы (5) измеренное значение магнитного курса Кми описывается следующим выражением:
Км + ДК„.
лов ориентации подвижного объекта путем компенсации в выходных сигналах составляющих ускорения, вызванного движением объекта и реализацией компенсационной схемы измерения курса с низкочастотным фильтром разностного сигнала. :-. | Цель достигается тем, что в измеритель углов ориентации подвижного объекта, содержащий первый ферромодуляционный преобразователь и первый линейный акселерометр, второй ферромодуляционный преобразователь и второй линейный аксе- ле рометр, третий ферромодуляционный преобразователь и третий линейный акселерометр, установленные попарно соответственно по продольной, поперечной и нормальной осям объекта, регистратор магнитного курса, блок вычисления крена, первым выходом соединённый с регистратором крена и первым входом блока вычисления магнитного курса, вторым выходом - с одним из входов блока вычисления тангажа, другой выход которого подключен к первому1 линейному акселерометру, а выход под- кл|ючён к регистратору тангажа и к второму входу блока вычисления магнитного курса, третий, четвертый и пятый входы которого соединены соответственно с первым, вторым и третьим ферромодуляционными преобразователями, введены измеритель линейной скорости, первый и второй йзме- руте ли угловой скорости, установлен ные соответственно по продольной, поперечной и нормальной Осям объекта, два перемножите}™, четыре алгебраических сумматора, интегратор низкочастотный фильтр. Первый и второй измерители угловой скорости соеди- t первыми входами соответствен но первого и второго перемножителей;, вторые рх оды Которых подключены к измерителю линейной скорости, а их выходы поДк/гюче- ны к первымвходам соответственно перво го и второго сумматоров, соединенных вторыми входами соответственно с третьим и вторым акселерометрами, а выходами с входами блока вычисления крена. Блок вы- чи слёния магнитного курса соединен через третий сумматор, фильтр и четвертый сум- мётор с регистратором магнитного курса, npJH этом второй измеритель угловой скорости соединен через интегратор с другими входами третьего и четвертого сумматоров. Включение в измеритель первого и вто- pcjro сумматоров, двух перемножителей , пе рвого и второго измерителей угловой ско- ро сти и измерителя линейной скорости направлено на компенсацию в выходных сигналах второго и третьего линейного ак- се перометра составляющих Vy % и Vy ш
ускорения, вызванного движением объекта. При этом уменьшаются погрешности как в определении тангажа, крена, так и магнитного курса объекта. Включение в измери5 тель интегратора, фильтра низких частот, третьего и четвертого сумматоров, а также второго измерителя угловой скорости направлено на повышение точности измерения магнитного курса обьекта за счет
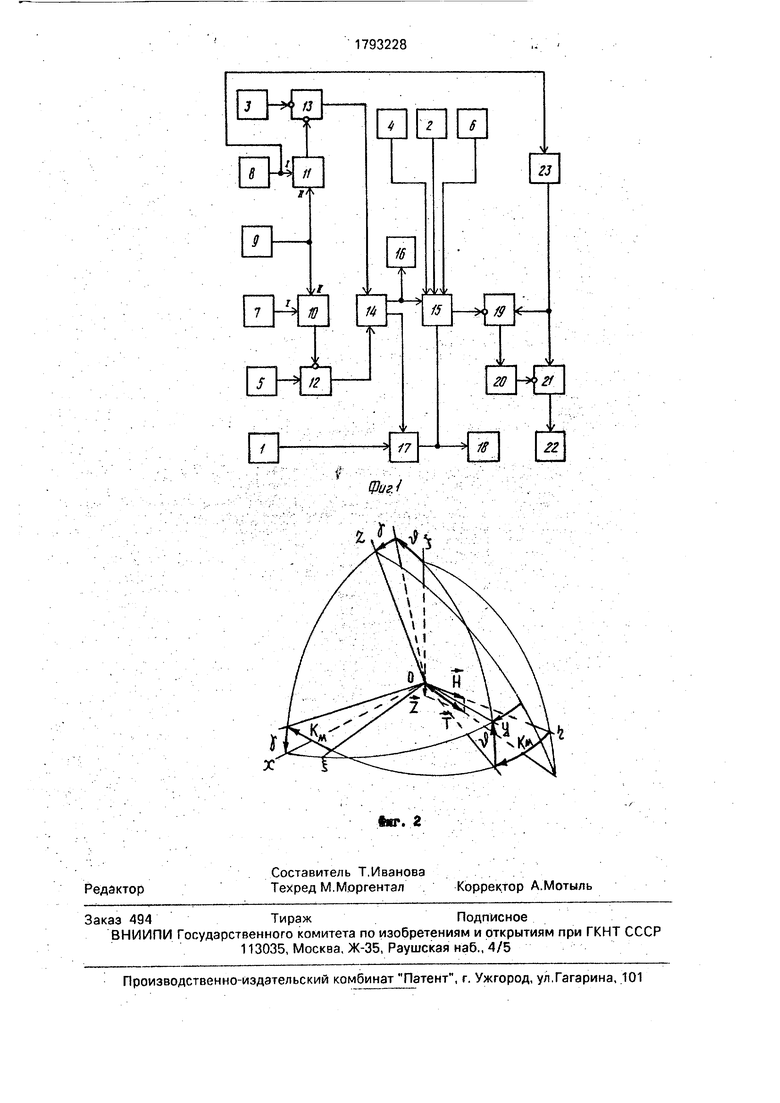
10 реализации компенсационной схемы его из- мёрения..-,; .- - - ;.. . На фиг.1 изображена функциональная схема измерителя углов ориентации подвижного объекта; на фиг.2 приведен кине15 матическйй чертеж, поясняющий взаимосвязь проекций вектора Т напряженности магнитного поля Земли на оси земной системы координат О % г} , имеющей магнитную ориентацию (ось rj горизонтальная и
0 лежит в плоскости магнитного меридиана, ось f направлена по вертикали в зенит) и связанной с объектом системы координат Oxyz;.: : - : ;:: ; ----.- ;..
5 Измеритель углов ориентации подвижного объекта (фиг. 1) состоит из первого линейного акселерометра 1 и первого ферромодуляционйогр преобразователя 2, второго линейного акселерометра 3 и второ0 го ферромодуляционного преобразователя 4, третьего линейного акселерометра 5 и третьего ферромодуляционного преобразователя 6, установленных попарно по продольной, поперечной и нормальной осям
5 объекта, первого 7 и второго 8 измерителей угловой скорости, установленных соответственно по поперечной и нормальной осям объекта, и измерителя 9 линейной скорости, установленного по продольной оси. Первый
0 7 и второй 8 измерители угловой скорости соединены с первыми входами соответственно первого 10 и второго 11 перемножителей, к вторым входам которых подключен измеритель 9 линейной скорости Объекта.
5 Выходы первого 10 и второго 11 пёрёмно- жителей соединены с первыми входами соответственно первого 12 и второго 13 сумматоров, к вторым входам которых подключены третий 5 и второй 3 линейные ак0 селероМетры. Выходы первого 12 и второго 13 сумматоров соединены соответственно с первым и вторым входами блока 14 вычисления крена, первый выход которого подключен к первому входу блока 15
5 вычисления магнитного курса и регистрато- ;ру 16 крена, второй выход - к одному из входов блока 17 вычисления тангажа, другим входом соединенного с первым линейным акселерометром 1, Выход блока 17
подключен к регистратору 18 тангажа и к второму входу блока 15 вычисления магнитного курса, третий, четвертый и пятый входы которого соединены соответственно с первым 2, вторым 4 и третьим 6 фёрромодуля- ционными преобразователями. Выход блока 15 вычисления магнитного курса через третий сумматор 19, низкочастотный фильтр 20 и четвертый сумматор 21 подключен к регистратору 22 магнитного курса. Второй измеритель 8 угловой скорости через интегратор 23 соединен с другими входами третьего 19 и. четвертого 21 сумматоров. ./. ; : ,. -;;: .V:x. У,; : -: /; .;
, Блоки питания на фиг.Т не показаны для упрощения w из-за: отсутствия связ й их с суйдёством предлагаемого технического ре:й|ей йя. ;; ;;:;V : ;V. ;:. : :;; ..:; ;
. В качестве измерителей 7 и 8 угловой скорости могут быть использованы гироско пйчёские измерители угловой скорости или лазерные гироскопы в режиме измерителей угловой скорости (Пельпор Д.С,, Михайлов И.Д., Бауман В.А, Гироскопические приборы и системы. -М.:. Высшая школа, 1988 с.424). В качестве измерителя 9 может бить ис п о льзбван измеритель истинной воздушной скорости в сочетании с доплеровским измерителем скорости угла сноса (Иванов. Ю.П., Синяков А.Н., Филатов И.В. Компенсироца- ние информационно-измерительных устройств летательных аппаратов. - Л.: Машиностроение, 1984, е.207), Реализация аналогового фильтра 20 низких частот с необходимой передаточной функцией
и +; 2 тф р.,,..;.:;. -.;у;,-:.
W(p)H
1 +2ТфР 4-Тф2 Р2
дана в книге Тетельбаума W.W., Шнёйдера . 400 схем для АВМ. - М.: Энергия, 1978, 44; .у,..й..v.Z;.;, ь , . : Измёрйтёль углЬв ориентации подв иж- йргр рб ;ёкта работает следующим образом. ; В процессе движения объекта на пёр- йые.входы первого 10 и второго 11 перемно- жйтёлёй посту Лакзт t измерителей 7. и 8 угловой ckop6cTi/i сигналы, пропорциональ- нЛ ё бЬ;ЬтветствёйнЪ г(1роёкЦиям а и0габсолютной угловой скорости объекта на его поперечную м нормальную оси. При этомi на вторые входы перемножителей 10 и 11 с измерителя 9 линейной скорости объекта г(6даётс;я сигнал, пр&порциональный проекции Vy с Кйростй Нбступательного движения объекта на его продольную ось. Выходной сигнал второго линейного акселерометра 3, пропорциональный согласно формулам (2)
выражению g sin у cos V + - - Vy аь, поступает на второй инверторный вход второ0
5
0
5
0
го сумматора 13, на первый инверторный вход которого с второго перемнржителя 11 поступает сигнал, пропорциональный Vy 0%. С третьего линейного акселерометра 5 сигнал, пропорциональный согласно формулам (2) выражению g cos у cos V + -- + Vy УХ,поступает на второй вход первого 12 сумматора, на первый инверторный вход которого с первого пёремножителя 10 поступает сигнал, пропорциональный Vy ft)x. На выходе первого 12 сумматора формируется сигнал, пропорциональный ; -: :..; ,, .....::./ . d V - - ; . . : - g -cosy cos V+--- , который идет на
первый вход блрка 14 вычисления крена. В тоже время на выходе второго 14 сумматора формируется сигнал, пропорциональный
g sin у cos V , поступающий
5
0
5
0
5
dt
на
второй вход блока 14 вычисления крена. В блоке 14 формируются два сигнала. Первый, сигнал, пропорциональный крену объекта у согласно формуле (3), поступает на регистратор 1.6 крена и первый вход блока 1.5 вычисления магнитного курса, а второй, пропорциональный выражению
cos у (g cos у cos V + -) + sin у
(gsihycpsV-- -),,:
идет на один из входов блока 17 вычисления тангажа. На другой вход блока 17 поступает с первого линейного акселерометра 1 сигнал, пропорциональный согласно формулам
(2) выражению g sin V + .--. С блока 17
:i / ; : .У л ; . X , ;.- : : . at -.; -...-.
вычйслекйя тангажа сигнал о тангаже объекта согласно формуле (3) подается на регистратор 18 тангажа и второй вход блока 15 вычисления магнитного курса. На третий, четвертый и пятый выходы последнего поступают также сигналы с первого 2,второго 4 и третьего 6 преобразователей, пропорци- Ьнальйые проекциям вектора напряженности МПЗ, соответственно Ту,ТХ И TZ. Выходной сигнал блока 15 вычисления магнитного курса согласно выражению (6) пропорционален Км + Д Км, где Д Км - высокочастотная погрешность измерения курса. Этот сигнал поступает на инверторный вход третьего сумматора 19, на другой вход которого поступает сигнал с измерителя 9 угловой скорости, прошедший через интегратор 23. Он пропорцибйалён выражению
/Ofe dt / (Км V ДО dt Км + Д2 t + Д К(0),
оо .-:,. - -;. :.- где Дг - погрешность измерения угловой скорости изменения магнитного курса; Дг t низкочастотная погрешность измерения курса; А К(0) - начальное рассогласование. На выходе третьего сумматора 19 формируется сигнал следующего вида: Км + с t+ + Л К(0)-КМ- А Км. Таким образом, на вход фильтра 20 низких частот с передаточной функцией, имеющей вид, например, W(p) |..., 1 +2ТфР
;,1 +2тфр +тф2р2
тф
постоянная
времени фильтра, поступает сигнал, пропорциональный Аг t+ А К(0) (высокочэстот- нУю составляющую АКМ сигнала низкочастотный фильтр не пропускает), дет на инверторный вход четвертого сумматора 21. Так как при этом на его другой вход с -интегратора 23 поступает сигнал, пропор Формула изо б р е те к и я Измеритель углов ориентации подвижного объекта, содержащий с первого по третий ферромодуляцйонные преобразователи, с первого по третий линейные акселе рбметры, регистратор магнитного курса, б)Пюк вычисления крена, первый выход которого подключен к входу регистратора крена и первому входу блока вычисления магнит- н( курса, а второй выход подключен к первому входу блока вычисления тангажа, второй вход которого соединен с выходом первого акселерометра, а выход подключен к объединённым входам регистратора тангажа и второму входу блока вычисления магнитного курса, третий, четвертый и пятый входы которого соединены соответственно с Первым, вторым и третьим ферромодуля- цйонными преобразователями, о т л и ч а ю- щ и и с я тем, что, с целью повышения динамической точности измерения углов ориентации, в него введены измеритель лициональный Км+ Да t + А К(0), то на выходе сумматора 21 формируется сигнал, пропорциональный магнитному курсу Км. Этот сигнал идет на регистратор 22 магнитного
курса объекта.
Преимущества данного измерителя по сравнению с прототипом следующие.. Уменьшаются погрешности в определении тангажа, крена и магнитного курса объекта
за счет компенсации в выходных сигналах второго 3 и третьего 5 линейных акселерометров составляющих ускорений рбьекта - Vy (ih и Vy (Ох. Дополнительно удается уменьшить погрешность в определении магнитного.
курса за счет компенсации его высокочастотной составляющей погрешности А Км.
нейной скорости, первый и второй измери- телм угловой скорости, два перемножителя,. с первого по чётве ртый алгебраические сум- матор ы, интегратор и низкочастотный фильтр причем первый и второй измерители угловой скорости соединены с первыми входами соответственно первого и второго rie- ремножителей, вторые входы которых подключены к измерителю линейной скорости, а их выходы подключены к первым входам соответственно первого и второго сумматоров, соединенных вторыми входами соответственно с третьим и вторым акселерометрами, а вь1ходами соединенны х с входами блока вычисления крена, блок вычисления магнитного курса соединен Через третий сумматор, низкочастотный фильтр и четвертый сумматор с регистратором магнитного курса, ё второй измеритель угловой скорости соединен через интегратор с соответствуюхцимй входами третьего и четвертого сумматоров,
