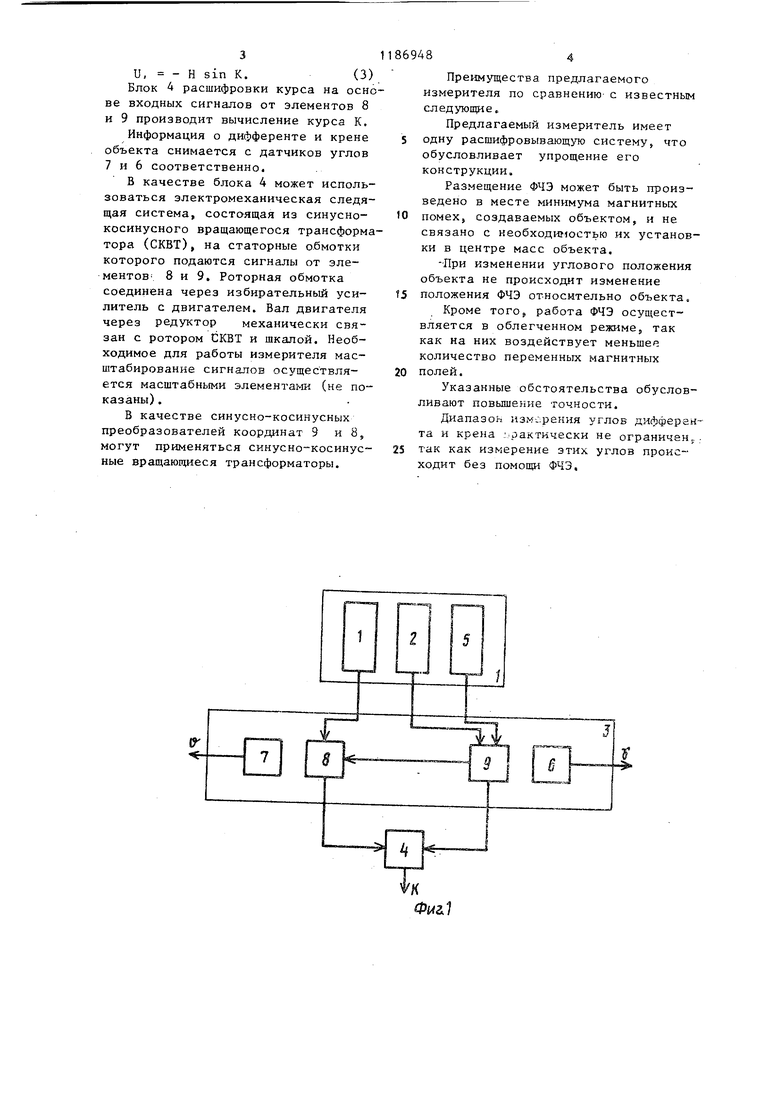
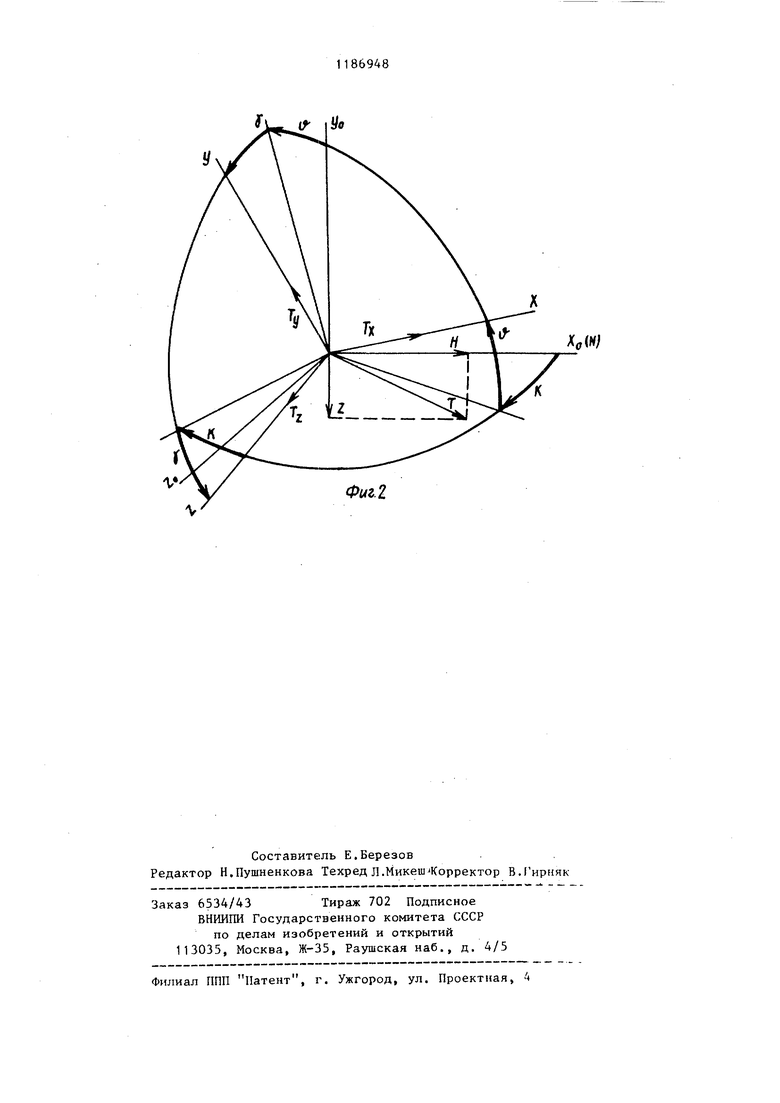
11 Изобретение относится к измерительной технике и может быть использовано в устройствах для определения магнитного курса, деф(1)ерента и крена9 расположенных на маллогабаритных подвижных объектах, не допускающих акустических шумов. Целью изобретения является повышение точности и расширение диапазона измерения углов. На фиг. 1 представлена структурная схема измерителя; на фиг.2 кинематический чертеж для пояснения работы измерителя. Измеритель углов поворота поДвижного объекта содержит взаимно перпендикулярные первый 1 и второй 2 феррозондовые чувствительные элементы (ФЧЭ) каждый из которых расположен соответственно вдоль продольной и поперечной осей объекта, двухосный маятниковыйподвес 3. Ось наружной рамки маятникового подвеса 3 (не показан) установлена вдоль продольной оси объекта, а ось внутренней рамки - вдоль поперечной оси объекта. Измеритель содержит также блок 4 расшифровки курса и третий феррозондовый чувствительный элемент 5, орто гональный первому 1 и второму 2 феррозондовым чувствительным элементам, датчики 6 и 7 углов поворота соответственно осей наружной и внутренней рамок маятникового подвеса 3 первый 8 и второй 9 синусно-косинусные преобразователи координат, кажды из которых установлен соответственно по осям внутренней и наружной рамок маятникового подвеса 3. Феррозондовы чувствительные элементы 1,2 и 5 установлены жестко на объекте. Выход (сигнальная обмотка) первого феррозондового чувствительного элемента 1 соединен с первым входом первого синусно-косинусного преобразователя 8координат, втор,ой вход которого соединен с первым выходом второго синусно-косинусного преобразователя 9координат, первый и второй входы которого соединены соответственно с выходом (сигнальной обмоткой) второго феррозондового чувствительного элемента 2 и выходом (сигнальной обмоткой) третьего феррозондового чувствительного элемента 5. Второй выход второго синусно-косинусного преобразователя 9 координат соединен ,с одним из входов блока 4 расшифровк 8 курса,один из входов которого соединен с выходом первого синусно-косинусного преобразователя 8 координат.Выходы датчиков 6 и 7 углов поворота соответственно осей наружной и внутренней рамок маятникового подвеса 3 и блока 4 расшифровки курса являются соответствующими информационными выходами измерителя. Датчик 6 установлен на наружной оси маятникового подвеса 3, а датчик 7 - на внутренней оси. Измеритель углов поворота подвижного объекта работает следующим образом. ФЧЭ 1.2 и 5 измеряют соответственно проекции Tj, 5 TU, Т вектора Т напряженности магнитного поля Земли, равные Tj HcosKcog-) - 2 5ш -5 з TtjHl-einKeinjf-coeXcosysin l-Zcos coSyj T H(-5;nKco6y cos)()-t-2co5T)5;n() При этом (фиг„2) система координат XYZ жестко связана соответственно с осями чувствительности ФЧЗ 1,2 и 5: система координат XjjYgZg - неподвижная система координат, ось Х которой направлена на магнитный полюс N и ось вертикальна , а К , т) , У - соответственно магнитный курс, дифферень и крен объекта. Горизонтальная и вертикальная составляющие вектора напряженности Т магнитного поля Земли изображены на фиг. 2 как Н и Z соответственно. Выходные сигналы U{ и Uj преобра9 с учетом Т зователя выразятся следующим образом и, Ту siny TZ cosy ; TZ si Ту cosy ; Выходной сигнал U гфеобразователя 8 с учетом TX , U2 и угла -) имеет вид Тх и sin Т cos-J и sin у sin - Т I cos V sin 9 2 (, OillT - a V Представляя в последнее равенство выражения для Ту, Тц, Т из формулы (1) получим V Н cos К, Выходной сигнал U преобразователя 9 с учетом Т ц и Т из формулы (1) примет вид 3 и, - Н sin К.(3) Блок 4 расшифровки курса на осно ве входных сигналов от элементов 8 и 9 производит вычисление курса К. Информация о дифференте и крене объекта снимается с датчиков углов 7 и 6 соответственно. В качестве блока 4 может использоваться электромеханическая следящая система, состо-ящая из синуснокосинусного вращающегося трансформа тора (СКВТ), на статорные обмотки которого подаются сигналы от элементов 8 и 9, Роторная обмотка соединена через избирательный усилитель с двигателем. Вал двигателя через редуктор механически связан с ротором СКВТ и шкалой. Необходимое для работы измерителя масштабирование сигналов осуществляется масштабньЕми элементами (не показаны) . В качестве синусно-косинусных преобразователей координат 9 и 8, могут применяться синусно-косинусвые вращающиеся трансформаторы. 8 Преимущества предлагаемого измерителя по сравнению- с известным следующие. Предлагаемый измеритель имеет одну расшифровывающую систему, что обусловливает упрощение его конструкции. Размещение ФЧЭ может быть произведено в месте минимума магнитных помех, создаваемых объектом, и не связано с необходимостью их установки в центре масс объекта. -При изменении углового положения объекта не происходит изменение положения ФЧЭ относительно объекта. Кроме тогор работа ФЧЭ осуществляется в облегченном режиме, так как на них воздействует меньшее количество переменных магнитных полей. Указанные обстоятельства обусловливают повыше}1ие точности. Диапазон измсфения углов дифферента и крена ..практически не ограниченj. . так как измерение этих углов происходит без помощи ФЧЭ,
| название | год | авторы | номер документа |
|---|---|---|---|
| Измеритель составляющих углов поворота подвижного объекта | 1983 |
|
SU1145248A1 |
| Устройство для определения азимута | 1986 |
|
SU1377585A1 |
| Устройство для определения азимута | 1986 |
|
SU1377586A1 |
| Измеритель углов ориентации подвижного объекта | 1991 |
|
SU1793228A1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2528105C2 |
| СПОСОБ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ УГЛОВЫХ ПОЛОЖЕНИЙ ОБЪЕКТА С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ ПРОСТРАНСТВЕННОГО ДВИЖЕНИЯ | 2016 |
|
RU2629691C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2112876C1 |
| УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2536365C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА В ПРОСТРАНСТВЕ С ИСПОЛЬЗОВАНИЕМ ОРБИТАЛЬНОГО ГИРОКОМПАСА | 2012 |
|
RU2509690C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
ИЗМЕРИТЕЛЬ УГЛОВ ПОВОРОТА ПОДВИЖНОГО ОБЪЕКТА, содержащий взаимно перпендикулярные первый и второй феррозондовые чувствительные элементы, каждый из которых расположен соответственно вдоль продольной и поперечной осей объекта, двухосный маятниковьй подвес, ось наружной рамки которого установлена ядоль продольной оси объекта, а ось внутренней рамки - вдоль поперечной оси объекта, и блок расшифровки курса, отличающийс я тем, что с целью повышения точности и расширения диапазона измерения углов, в измеритель введены третий феррозондовый чувствительный элемент,ортогональный первому и второму феррозондовым чувствительным элементам,датчики углов поворота соответственно осей наружной и внутренней рамок маятникового подвеса,первый и второй синусно-косинусные преобразоЗатёли координат, каидый из которых установлен соответственно по осям наружной и внутренней рамок маятникового подвеса, причем феррозондовые чувствительные элементы установлены жестко на объекте, а выход первого феррозондового чувствительного эле-i мента соединен с первым входом первого синусно-косинусного преобразоS вателя координат, второй вход которого соединен с первым выходом второго синусно-косинусного преобразователя координат, первый и второй входы которого соединены соответственно с выходом второго феррозондового чувствительного элемента и выходом третьего феррозондового чувствительного элемента, а второй выход второго синусно-косинусного преобразователя координат соединен с эо одним из входов блока расшифровки S курса, один из входов которого сое4 динен с выходом первого синусно - 90 косинусного преобразователя координат, выходы датчиков углов поворота соответственно осей наружной и внутренней рамок маятникового подвеса и блока расшиЛровки курса являются соответствующими выходами измерителя.
| Авторское свидетельство СССР по заявке № 3316510/18-21, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Измеритель углов поворота подвижного объекта | 1972 |
|
SU459670A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| . | |||
