СО
-si
1
со ;о М
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления коммутацией электродвигателя постоянного тока и устройство для его осуществления | 1984 |
|
SU1327259A1 |
| Электропривод постоянного тока | 1977 |
|
SU692044A1 |
| Вентильный электродвигатель | 1985 |
|
SU1334343A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОТОКОМ ВОЗБУЖДЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА В СИСТЕМЕ ДВУХЗОННОГО РЕГУЛИРОВАНИЯ СКОРОСТИ | 2011 |
|
RU2457611C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТЯГОВЫМ ПРИВОДОМ ЭЛЕКТРОВОЗА ПЕРЕМЕННО-ПОСТОЯННОГО ТОКА | 1990 |
|
RU2026209C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА ПОСТОЯННОГО ТОКА С УСТРОЙСТВОМ ФОРМИРОВАНИЯ КОММУТИРУЮЩЕГО ПОЛЯ | 1997 |
|
RU2119225C1 |
| Электропривод подъемной машины с переменными радиусами навивки канатов | 1982 |
|
SU1064408A1 |
| Устройство для определения углового положения ротора вентильного двигателя | 1981 |
|
SU1003261A1 |
| Способ управления электроприводом экскаватора и устройство для его осуществления | 1990 |
|
SU1740573A1 |
| Способ управления электроприводом постоянного тока и устройство для его осуществления | 1977 |
|
SU705632A1 |

Изобретение относится к электротехнике и может быть использовано в электроприводах постоянного тока Целью изобретения является повьшение точности. Устройство содержит реле напряжения, катушка 6 которого подключена к выводам якорной обмотки электродвигателя 1. Блок 5 компенсации действия реакции коммутационных токов выполнен в виде функционального преобразователя, характеристика которого обратив кривой намагничивания электродвигателя в зоне действия реакции коммутационных токов. В данном устройстве разность между скорректированной величиной напряжения на электродвигателе и падением напряжения в его якорной цепи вводят в качестве сигнала обратной связи по частоте вращения. 3 ил. Л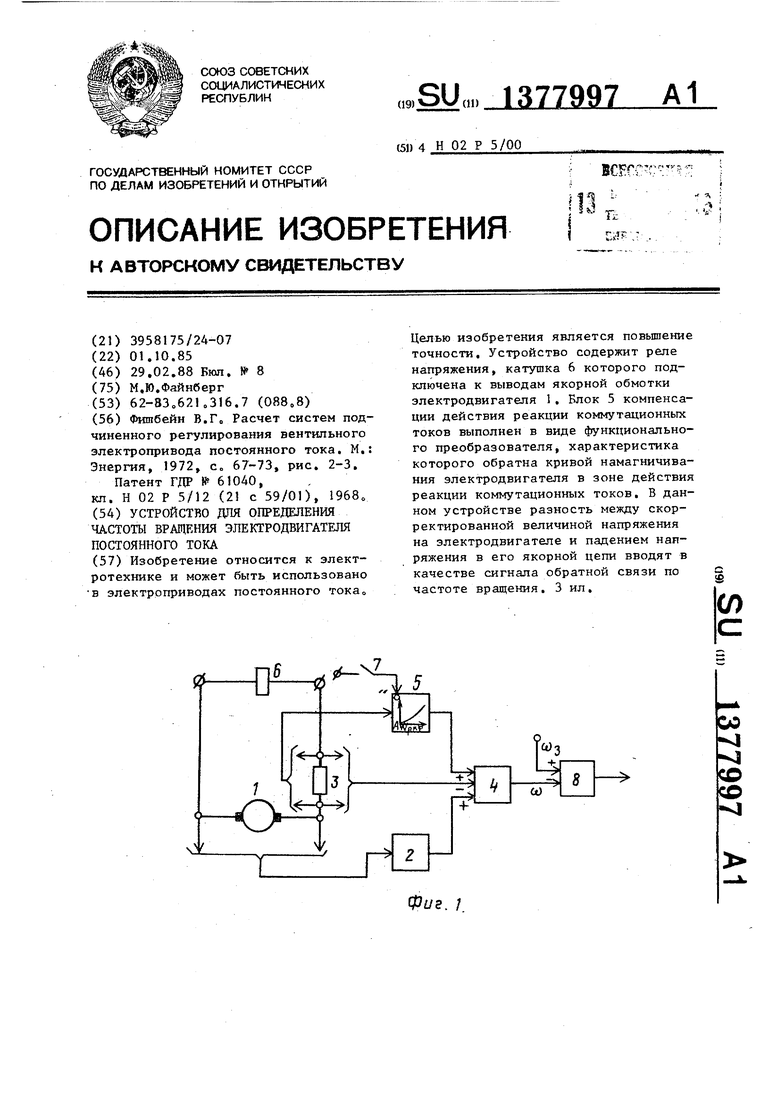
Фие. 1
Изобретение относится к электротехнике, а именно к электроприводам постоянного тока с обратной связью по частоте вращения электродвигателей, преимущественно с нерегулируемым потоком возбуждения.
Цель изобретения - повышение точности устройства.
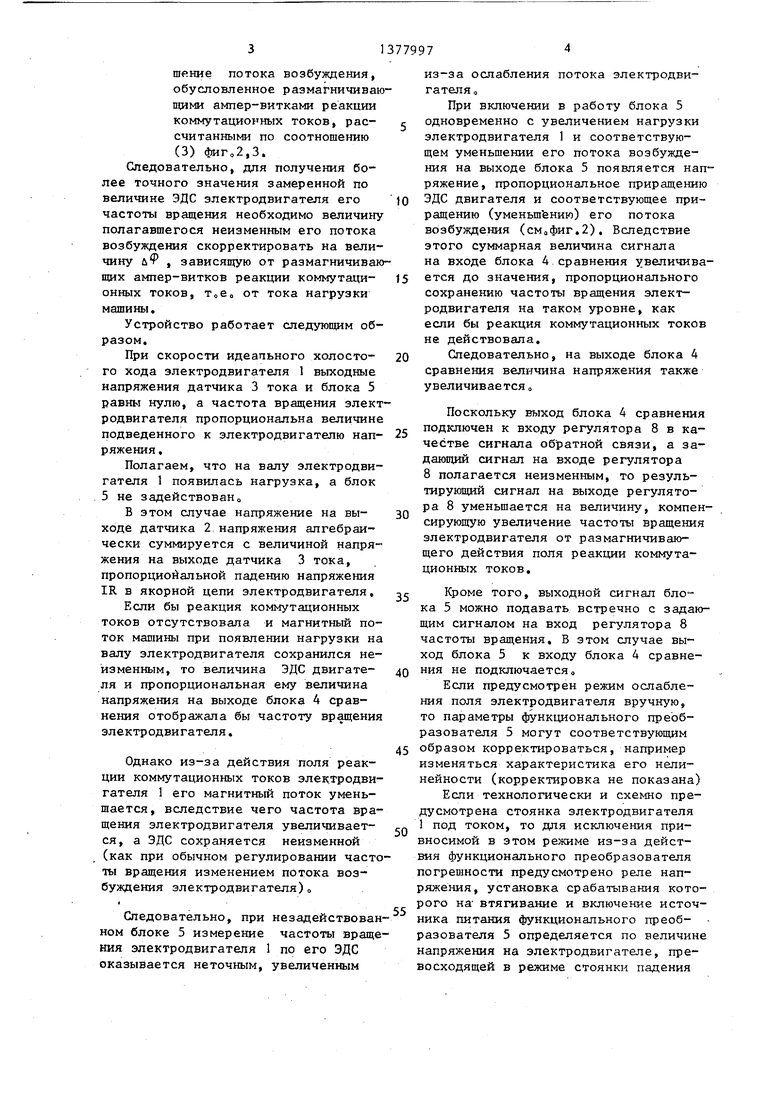
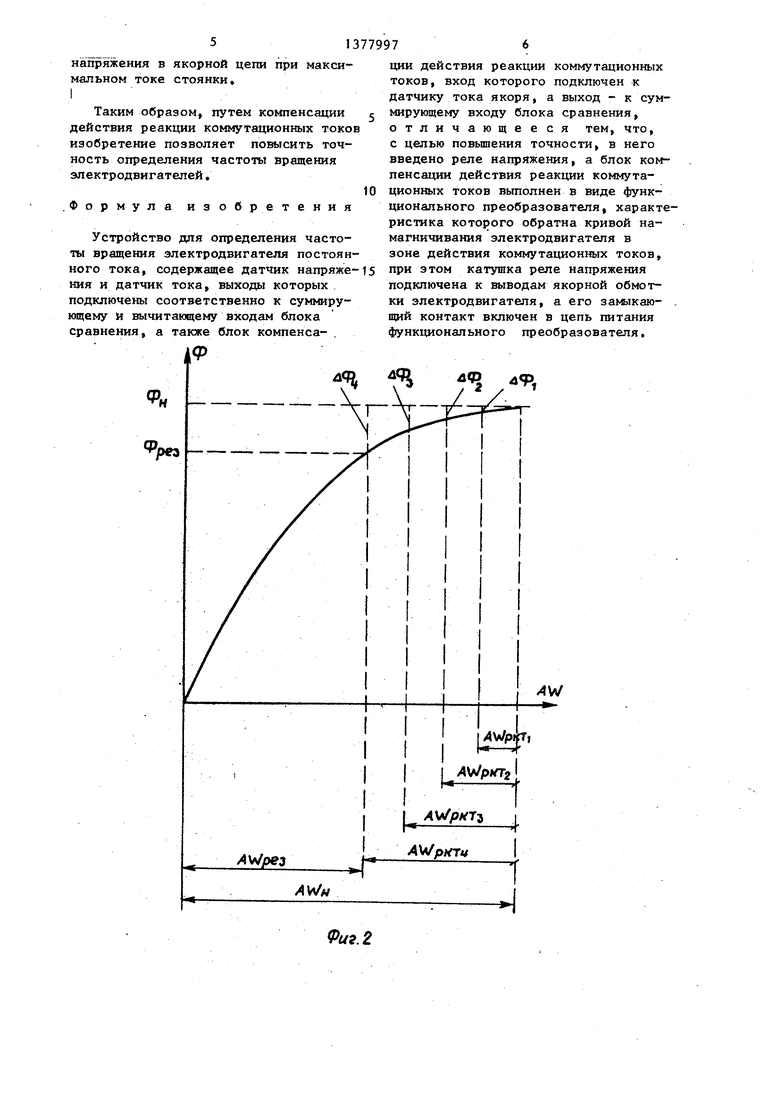
На фиг,1 изображена функциональная схема предлагаемого устройства; на фиг,2 - кривая намагничивания электродвигателя; на фиг.З - характеристика функционального преобразователя.
Устройство для определения частоты вращения электродвигателя 1 постоянного тока (i|mr,l) содержит датчи 2 напряжения и датчик 3 ока, выходы которых подключены .соответственно к cyMMHpyromeNfy и вычитакяцему входам блока 4 сравнения, а также блок 5 компенсации действия реакции коммутационных токов, вход которого подключен к датчику 3 тока якоря, а выход к суммярующему входу блока 4 сравнения, исполненный в виде функционального преобразователя, характеристика которого обратна кривой намагничивания электродвигателя в зоне действия реакции коммутационных токов, а также реле напряжения, катушка 6 которого подключена к выводам якорной обмотки электродвигателя, а его замыкающий контакт 7 включен в цепь питания функционального преобразователя. Выход блока 4 сравнения соединен с входом регулятора 8 частоты вращения, к которому подключен также выход задатчика скорости (сигнал оз,) а выход регулятора 8 частоты вращения подключен к входу регулятора тока системы подчиненного регулирования (не показан)
При определении частоты вращения электродвигателя с помощью тахометри ческого моста реализуется зависимость
Е G-Фбэ и - IR,
(О
где Cg - конструктивная постоянная; П - напряжение на двигателе; ,1 - ток двигателя; R - сопротивление якорной цепи
Электродвигателя, Следовательно частота вращения
„ и - IR ,(2)
- СеФ
тфе,, частота вращения электродвигателя при постоянном потоке возбуждения пропорциональна его ЭДС,
В то же время для электродвигателей постоянного тока, особенно для некомпенсированных машин, характерно изменение главного поля машины под влиянием действия его поля реакции коммутационных токов, размагничивающих основной поток машины (двигателя) при ускоренной коммутации, на которую обычно настраивают машину,
Размагничиваняцее действие поля реакции коммутационных токов характерно также и для компенсированных машин, где обычная реакция якоря вообще не появляется о
Известно, что ампер-витки поля реакции коммутационных токов определяются из соотношения
AWp 0,12 - 0,2-AS-b
к
(3)
25
30
35
0
5
0
где AS - линейная нагрузка машины; bj,- ширина зоны коммутации о
Величина линейной нагрузки машины AS и ширина ее зоны коммутации Ь определяются по данным заводов- изготовителей машин и лежат соответственно в пределах (100-600 А-СТ/см) и (4-7 см)
При номинальной нагрузке машины размагничивающее действие поля реакции коммутационных токов (по ампер- виткам) может достигать 10-15% от намагничивающей силы обмотки главного полюса, а по потоку для насьш1ен- ной магнитной системы может привести к ослаблению потока до 5-10%, При ненасыщенной магнитной системе и двухкратных рабочих перегрузках электродвигателя главное поле машины из-за действия реакции коммутационных токов ослабляется до 40% и более.
При переходе двигателя, например в режиме торможения в генераторный режим при той же ускоренной коммутации имеет место подмагничивание главного поля, которое для насыщенной магнитной системы незначительно,
С учетом размагничивающего действия поля реакции коммутационных токов частота вращения
03
(4)
и - IR
С()
где дФ - определенное по кривой намагничивания машины уменьшр.ние потока возбуждения, обусловленное размагничивающими ампер-витками реакции коммутационных токов, рас- считанными по соотношению (3) фиго2,3.
Следовательно, для получения более точного значения замеренной по величине ЭДС электродвигателя его частоты вращения необходимо величину полагавшегося неизменным его потока возбуждения скорректировать на величину лФ , зависящую от размагничивающих ампер-витков реакции коммутаци- онных токов, Тое от тока нагрузки машины.
Устройство работает следующим образом.
При скорости идеального холосто- го хода электродвигателя 1 выходные напряжения датчика 3 тока и блока 5 равны нулю, а частота вращения электродвигателя пропорциональна величине подведенного к электродвигателю нап- ряжения,
Полагаем, что на валу электродвигателя 1 появилась нагрузка, а блок 5 не задействовано
В этом случае напряжение на вы- ходе датчика 2, напряжения алгебраически суммируется с величиной напряжения на выходе датчика 3 тока, пропорциойальной падению напряжения IR в якорной цепи электродвигателя,
Если бы реакция коммутационных токов отсутствовала и магнитный поток машины при появлении нагрузки на валу электродвигателя сохранился неизменным, то величина ЭДС двигате- ля и пропорциональная ему величина напряжения на выходе блока 4 сравнения отображала бы частоту вращения электродвигателя.
Однако из-за действия поля реакции коммутационных токов электродвигателя 1 его магнитный поток уменьшается, вследствие чего частота вращения электродвигателя увеличивает- ся, а ЭДС сохраняется неизменной (как при обычном регулировании частоты вращения изменением потока возбуждения электродвигателя)о
Следовательно, при незадействован- ном блоке 5 измерение частоть вращения электродвигателя 1 по его ЭДС оказывается неточным, увеличенным
5
0 5
О 5
о
5
о
5
из-за ослабления потока электродвигателя о
При включении в работу блока 5 одновременно с увеличением нагрузки электродвигателя 1 и соответствующем уменьшении его потока возбуждения на выходе блока 5 появляется напряжение, пропорциональное приращению ЭДС двигателя и соответствующее приращению (yмeньщfeнию) его потока возбуждения (смофиг.2). Вследствие этого суммарная величина сигнала на входе блока 4 сравнения увеличивается до значения, пропорционального сохранению частоты вращения электродвигателя на таком уровне, как если бы реакция коммутационных токов не действовала.
Следовательно, на выходе блока 4 сравнения величина напряжения также увеличивается,
Поскольку выход блока 4 сравнения подключен к входу регулятора 8 в качестве сигнала обратной связи, а задающий сигнал на входе регулятора 8 полагается неизменным, то результирующий сигнал на выходе регулятора 8 уменьшается на величину, компенсирующую увеличение частоты вращения электродвигателя от размагничивающего действия поля реакции коммутационных токов.
Кроме того, выходной сигнал блока 5 можно подавать встречно с задающим сигналом на вход регулятора 8 частоты вращения. В этом случае выход блока 5 к входу блока 4 сравнения не подключается
Если предусмотрен режим ослабления поля электродвигателя вручную, то параметры функционального преобразователя 5 могут соответствующим образом корректироваться, например изменяться характеристика его нелинейности (корректировка не показана)
Если технологически и схемно предусмотрена стоянка электродвигателя 1 под током, то для исключения привносимой в этом режиме из-за действия функционального преобразователя погрешности предусмотрено реле напряжения, установка срабатывания которого на втягивание и включение источника питания функционального преобразователя 5 определяется по величине напряжения на электродвигателе, превосходящей в режиме стоянки падения
Фн
Ф,
pw
Av/рез
Фиг. 2
-4W
II
II 7
11 ,|.
IAV/ptrrv
ФигЗ
| Фишбейн В.Го Расчет систем подчиненного регулирования вентильного электропривода постоянного тока | |||
| М,: Энергия, 1972, с, 67-73, рис | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Котел-газогенератор | 1940 |
|
SU61040A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
