гв
1
NJ
уровня, задающего синхронную частоту скольжения. Частота скольжения двигателя 1 не успевает измениться под действием тормозящего момента нагрузки двигателя 1 за то же время до синхронной частоты скольжения, а это гарантирует надежное втягивание двигателя в синхронизм. 1 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1986 |
|
SU1378004A1 |
| Электропривод переменного тока | 1986 |
|
SU1345302A1 |
| Электропривод переменного тока | 1984 |
|
SU1185528A1 |
| Электропривод переменного тока | 1984 |
|
SU1272459A1 |
| Электропривод переменного тока | 1985 |
|
SU1359881A1 |
| Электропривод переменного тока | 1984 |
|
SU1220100A2 |
| Электропривод переменного тока | 1984 |
|
SU1251281A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1979 |
|
SU1108597A2 |
| Электропривод | 1981 |
|
SU1083319A1 |
| Стабилизированный электропривод | 1987 |
|
SU1508334A1 |
Изобретение относится к электротехнике и может быть использовано в го рир-металлургической промышленности. Целью изобретения является повышение надежности втягивания двигателя в синхронизм при реализации промежуточного синхронного режима. С этой целью электропривод переменного тока снабжен управляемым ключом 42, управляющий вход которого соединен с выходом элемента задержки 23 блока пуска 16. Регулятор 14 частоты скольжения снабжен дополнительным входом к которому через ключ 42 подключен выход источника 43 однополярного сигнала. Введение указанных элементов обеспечивает надежное втягивание асинхронного двигателя 1 в синхронизм, т.к. выходной сигнал на интервале времени втягивания двигателя 1 в синхронизм поступает через управляемый ключ 42 на вход регулятора 14 частоты скольжения и обеспечивает быстрое изменение его выходного сигнала от нуля до I (Л
1
Изобретение относится к электротехнике, а именно к электроприводу переменного тока на базе машины двойного питания с непосредственным преобразователем частоты в цепи ротора, может быть использовано в механизмах, требующих высоких динамических свойств и повышенной надежности, например, в горно-металлургической промьштенност11 при регулировании числа оборотов ротора относительно синхронной скорости питаняцего поля, и является усовершенствованием устройства по авт. св. № 1345302.
Целью изобретения является обеспечение повьшения надежного втягивания двигателя в синхронизм при реализации промежуточного синхронного режима.
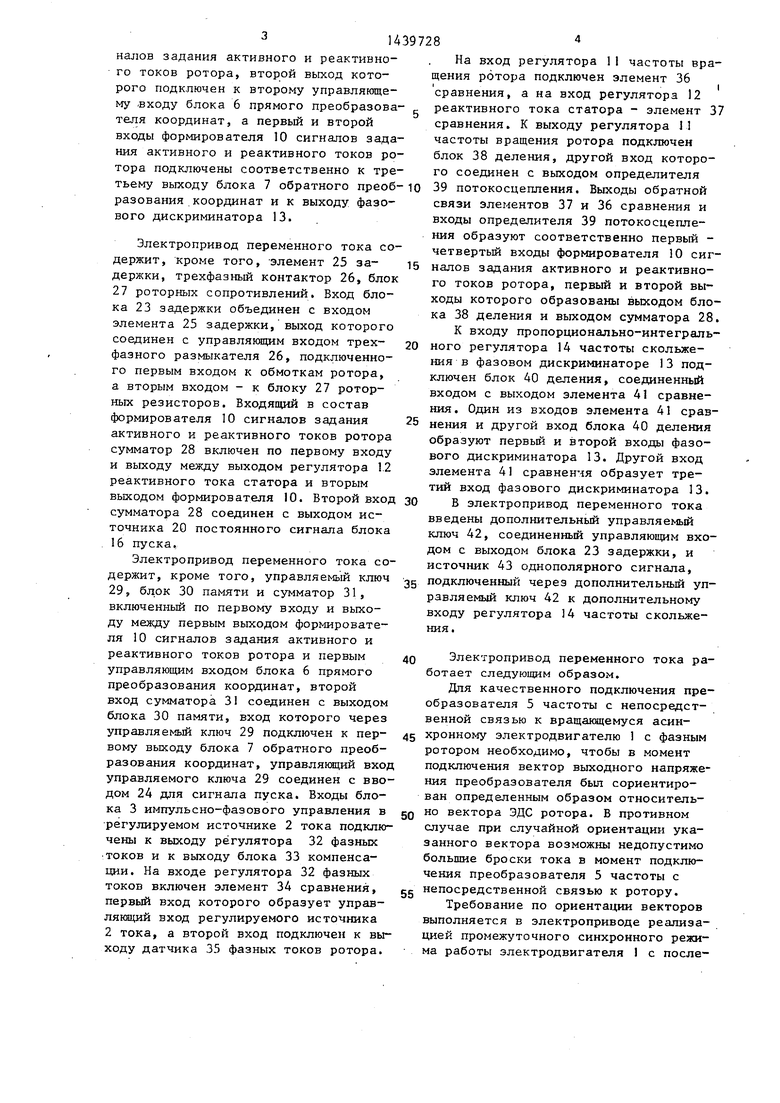
На чертеже представлена функциональная схема электропривода переменного тока.
Электропривод переменного тока содержит асинхронный двигатель 1 с фазным ротором, подключенным к выходам регулируемого источника 2 тока, выполненного с последовательно соединенными блоком 3 импульсно-фазового управления, управляемым ключом 4 и преобразователем 5 частоты с непосредственной связью, блок 6 прямого преобразования координат, подключенный выходами к управляющим входам регулируемого источника 2 тока, блок 7 обратного преобразования координат, подключенный входами к выходам датчиков фазных токов 8 и напряжений 9 статора, формирователь 10 сигналов задания активного и реактивного токов ротора с регулятором 11 частоты вращения ротора и регулятором 12 реактивного тока статора, фазовьй дискриминатор 13 с пропорционально- интегральным регулятором 14 частоты скольжения на выходе, формирователь
15 гармонических функций, вход которого соединен с выходом фазового дискриминатора 13, а выходы подключены
к опорным входам блока 6 прямого преобразования координат, блок 16 пуска, выполненный с тремя управляемыми ключами 17-19, источником 20 постоянного сигнала, ограничителем 21 уровня
0 сигнала, определителем 22 начального скольжения и блоком 23 задержки, вход которого образует вход блока 16 пуска и соединен с вводом 24 для сигнала пуска, с управляк«цим входом управляе5 мых ключей 4 и 17. Выходы первого управляемого ключа 17, образующие первый и второй выходы блока 16 пуска, подключены соответственно к входу и выходу пропорционально-интегрального
0 регулятора 14 частоты скольжения и
к выходам ограничителя 21 уровня сигнала, первый вход которого подключен к выходу определителя 22 начального скольжения, а второй вход объединен
5 с управлякнцим входом второго управляемого ключа 18, с управляющим входом третьего управляемого ключа 19 блока 16 пуска и подключен к выходу блока 23 задержки. Выходы управляемо0 го ключа 18, образующие третий и четвертый выходы блока 16 пуска, подключены соответственно к входу и выходу регулятора I1 частоты вращения ротора, выходы третьего управляемого
25 ключа 19, образующие пятый и шестой выходы блока 16 пуска, подключены соответственно к входу и выходу регулятора 12 реактивного тока статора. Первьш и второй входы фазового дис- 40 криминатора 13 подключены к одноименным выходам блока 7 обратного преоб- разования координат, а третий вход фазового дискриминатора 13 и первый управляклций вход блока 6 прямого пре-. 45 образования координат подключены к первому выходу формирователя 10 сигналов задания активного и реактивного токов ротора, второй выход которого подключен к второму управляющему входу блока 6 прямого преобразователя координат, а первый и второй входы формирователя 10 сигналов задания активного и реактивного токов ротора подключены соответственно к третьему выходу блока 7 обратного преоб- разования координат и к выходу фазового дискриминатора 13. .
Электропривод переменного тока содержит, кроме того, -элемент 25 за- держки, трехфазный контактор 26, блок 27 роторных сопротивлений. Вход блока 23 задержки объединен с входом элемента 25 задержки, выход которого соединен с управлякяцим входом трех- фазного размыкателя 26, подключенного первым входом к обмоткам ротора, а вторым входом - к блоку 27 роторных резисторов. Входящий в состав формирователя 10 сигналов задания активного и реактивного токов ротора сумматор 28 включен по первому входу и выходу между выходом регулятора 1.2 реактивного тока статора и вторым выходом формирователя 10. Второй вход сумматора 28 соединен с выходом источника 20 постоянного сигнала блока 16 пуска,
Электропривод переменного тока содержит, кроме того, управляемый ключ 29, блок 30 памяти и сумматор 31, включенный по первому входу и выходу между первым выходом формирователя 10 сигналов задания активного и реактивного токов ротора и первым управляющим входом блока 6 прямого преобразования координат, второй вход сумматора 31 соединен с выходом блока 30 памяти, вход которого через управляемьй ключ 29 подключен к пер- вому выходу блока 7 обратного преобразования координат, управлякщий вход управляемого ключа 29 соединен с вводом 24 для сигнала пуска. Входы блока 3 импульсно-фазового управления в регулируемом источнике 2 тока подключены к выходу регулятора 32 фазных токов и к выходу блока 33 компенсации. На входе регулятора 32 фазных токов включен элемент 34 сравнения, первый вход которого образует управлякщий вход регулируемого источника 2 тока, а второй вход подключен к выходу датчика 35 фазных токов ротора.
На вход регулятора 11 частоты вращения ротора подключен элемент 36 сравнения, а на вход регулятора 12 реактивного тока статора - элемент 3 сравнения. К выходу регулятора 11 частоты вращения ротора подключен блок 38 деления, другой вход которого соединен с выходом определителя 39 потокосцепления. Выходы обратной связи элементов 37 и 36 сравнения и входы определителя 39 потокосцепления образуют соответственно первый - четвертый входы формирователя 10 сигналов задания активного и реактивного токов ротора, первый и второй выходы которого образованы выходом блока 38 деления и выходом сумматора 28
К входу пропорционально-интегрального регулятора 14 частоты скольжения в фазовом дискриминаторе 13 подключен блок 40 деления, соединенный входом с выходом элемента 41 сравнения. Один из входов элемента 41 сравнения и другой вход блока 40 деления образуют первый и второй входы фазового дискриминатора 13. Другой вход элемента 41 сравнения образует третий вход фазового дискриминатора 13.
В электропривод переменного тока введены дополнительный управляемый ключ 42, соединенный управляющим входом с выходом блока 23 задержки, и источник 43 однополярного сигнала, подключенный через дополнительный управляемый ключ 42 к дополнительному входу регулятора 14 частоты скольжения.
Электропривод переменного тока работает следующим образом.
Для качественного подключения преобразователя 5 частоты с непосредственной связью к вращакицемуся асинхронному электродвигателю 1 с фазным ротором необходимо, чтобы в момент подключения вектор выходного напряжения преобразователя был сориентирован определенным образом относительно вектора ЭДС ротора. В противном случае при случайной ориентации указанного вектора возможны недопустимо больщие броски тока в момент подключения преобразователя 5 частоты с непосредственной связью к ротору.
Требование по ориентации векторов выполняется в электроприводе реализацией промежуточного синхронного режима работы электродвигателя 1 с после10
дующим автоматическим переходом к регулируемому режиму работы. Для этого по сигналу пуска, поступающему на ввод 24, выходы преобразователя 5 частоты с непосредственной связью подключаются к рртору и на протяжении времени & t формируется неизменной частоты выходной ток преобразователя. За время At электродвигатель 1 втягивается в синхронизм и векторы оказываются сориентированы необходи- мЬ1м образом.
Для того, не возникало перенапряжений в цепях ротора при размы- 15 кании контактора, закорачивающего ротор в нерегулируемом режиме работы (не показан), в электроприводе используется блок 27 роторных сопротивлений, подключенный в нерегулируемом 20 режиме через трехфазный контактор 26 к ротору. Пока ротор закорочен контактором, блок 17 роторных сопротивлений в работе не участвует, зато при размыкании контактора ток ротора поступает в роторные сопротивления блока 27 и перенапряжение не возникает. После размыкания контактора в ротор подается выходной ток преобразователя 5 частоты с непосредственной 30 связью. Этим током электродвигатель 1 втягивается в синхронизм за время не более ,аt (время элемента 25 задержки), в результате чего направление вектора указанного тока становит- 35 ся согласным направлению вектора тока ротора. Теперь можно отключать от - ротора роторные сопротивления блока
4397286
прежней частоты. Формирование выходного тока данной частоты преобразователем 5 частоты с непосредственной связью осуществляется на интервале времени (t + л t ) .с помощью блока 23 задержки. По выходному сигналу блока 23 задержки на интервале времени (At , + Atg) после поступления сигнала пуска осуществляется закорачивание управляемыми ключами 18 и 19 регулятора V1 частоты вращения ротора и регулятора 12 реактивного тока ста25
тора, а также ограничение выходного сигнала пропорционально-интегрального регулятора 4 частоты скольжения ограничителем 21 уровня сигнала.
По окончании интервала времени (at + «atj) после поступления сигнала пуска выходной сигнал блока 23 задержки изменяется и электропривод переходит в регулируемьш режим работы.
Для надежного втягивания двигателя в синхронизм при реализации его промежуточного синхронного режима работы выходная частота регулируемого источника тока на интервале времени втягивания двигателя в синхронизм должна быть несколько большей, чем частота скольжения двигателя в момент подключения к ротору преобразователя 5 частоты с непосредственной связью.
Выходная частота преобразователя 5 частоты с непосредственной связью задается выходным сигналом пропорционально-интегрального регулятора 14 частоты скольжения. Выходной сигнал
Выходная частота преобразователя 5 частоты с непосредственной связью задается выходным сигналом пропорционально-интегрального регулятора 14 частоты скольжения. Выходной сигнал
на управлякщий вход которого поступает задержанный на время At элементом 26 задерж1си сигнал пуска.
27 без каких-либо перенапряжений в цепях ротора. Это осуществляется раз- 40 последнего изменяется после размыка- мыканием трехфазного контактора 26, ™ управляемого ключа 17 от нулевого значения до уровня, задаваемого ограничиТурлем 2 уровня сигнала. Темп изменения данного сигнала должен быть 4g достаточно высоким, чтобы к моменту выхода его на уровень, задаваег-пэгй ограничителем 21 уровня сигнала, частота скольжения двигателя не успела бы существенно измениться и была бы gQ меньше выходной частоты преобразователя 5 частоты с непосредственной связью. Иначе двигатель может не втянуться в синхронизм, В предлагаемом электроприводе переменного тока высо- gg кий темп изменения выходного сигнала
Отключение роторных сопротивлений блока 27 от ротора приводит к изменению величины тока ротора, в результате чего возникают затухающие колебания тока ротора, вызванные выпаданием электродвигателя 1 из синхронизма. Колебания затухают при повторном втягивании электродвигателя 1 в синхронизм, для обеспечения которого с выхода преобразователя 5 частоты с непосредственной связью на протяжении интервала времени ДЦ после отключения роторных сопротивлений блока 27 от ротора продолжает поступать ток
пропорционально-интегрального регулятора 14 частоты скольжения обеспечивается поступающим на его вход через дополнительный управляемый ключ 42
5 0 0 5
5
тора, а также ограничение выходного сигнала пропорционально-интегрального регулятора 4 частоты скольжения ограничителем 21 уровня сигнала.
По окончании интервала времени (at + «atj) после поступления сигнала пуска выходной сигнал блока 23 задержки изменяется и электропривод переходит в регулируемьш режим работы.
Для надежного втягивания двигателя в синхронизм при реализации его промежуточного синхронного режима работы выходная частота регулируемого источника тока на интервале времени втягивания двигателя в синхронизм должна быть несколько большей, чем частота скольжения двигателя в момент подключения к ротору преобразователя 5 частоты с непосредственной связью.
Выходная частота преобразователя 5 частоты с непосредственной связью задается выходным сигналом пропорционально-интегрального регулятора 14 частоты скольжения. Выходной сигнал
0 последнего изменяется после размыка- ™ управляемого ключа 17 от нулевого значения до уровня, задаваемого ограничиТурлем 2 уровня сигнала. Темп изменения данного сигнала должен быть 4g достаточно высоким, чтобы к моменту выхода его на уровень, задаваег-пэгй ограничителем 21 уровня сигнала, частота скольжения двигателя не успела бы существенно измениться и была бы Q меньше выходной частоты преобразователя 5 частоты с непосредственной связью. Иначе двигатель может не втянуться в синхронизм, В предлагаемом электроприводе переменного тока высо- gg кий темп изменения выходного сигнала
пропорционально-интегрального регулятора 14 частоты скольжения обеспечивается поступающим на его вход через дополнительный управляемый ключ 42
выходным сигналом источника 43 одно- полярного сигнала. При переходе электропривода к регулируемому режиму работы дополнительный управляемый ключ размыкается и сигнал с источника 43 однополярного сигнала на вход пропорционально-интегрального регулятора 14 частоты скольжения не поступает. Таким образом благодаря введению в электропривод переменного тока дополнительного управляемого ключа 42 и источника 43 однополярного сигнала обеспечивается надежное втягивание двигателя в синхронизм при реализации промежуточного синхронного режима работы двигателя, что определяет повышение качества работы в сравнении с известным решением.
о р м у л а и
8 зоб
р е т е н и я
Электропривод переменного тока по авт. св. № 1345302, отличающийся тем, что, с целью обеспечения повышения надежного втягивания двигателя в синхронизм при реализации промежуточного синхронного режима работы, введены дополнительньй управляемый ключ и источник однополярного сигнала, а регулятор частоты скольжения снабжен дополнительным входом, подключенным через дополнительный управляемый ключ к выходу источника однополярного сигнала, при этом управляющий вход дополнительного управляемого ключа соединен с выходом элемента задержки блока пуска.
| Электропривод переменного тока | 1986 |
|
SU1345302A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
