Изобретение относится к электротехнике, а именно к электроприводу переменного тока на основе асинхронного двигателя с фазным ротором, и может быть использовано в механизма и машинах, требующих регулирования скорости ротора относительно синхронного значения.
Цель изобретения - повышение качества переходных процессов за счет исключения бросков тока при переходе от нерегулируемого к регулируемому режиму работы.
На чертеже представлена функциональная схема электропривода
переменного тока. I
Электропривод переменного тока
содержит асинхронный электродвигатель 1 с фазным ротором, подключен
ным к выходу преобразователя частоты 2 в режиме источника регулируемо тока, датчик тока 3 и датчик напряжения 4 ротора, а также датчик тока 5 и датчик 6 напряжения статора, блок 7 формирования активной и реактивной составляющих тока ротора, состоящий из блока 8 формирования сигналов задания составляющих тока ротора, первый и второй выходы ко
торого соответственно через компара торы 9 и 10 соединены с входами регуляторов 11 и 12 пропорционально-интегрального типа, выходы которых образуют соответственно первый и второй выходы блока 7, а информа- ционные входы компараторов 9 и 10 образуют первый и второй входы блок 7, соединенные с выходами блока 13 вьшисления активной и реактивной составляющих тока ротора, подключен ного одним своим входом к датчику тока 5, а другим входом - к датчику напряжения 6 статора.
Электропривод переменного тока содержит таюке блок переключения режимов 14 с двумя парами коммутируемы и одним управляющим входом, выходы которого соединены с опорными входами блока прямого преобразования координат 15, аналоговые входы которого соединены с выходами блока 7 , а выход - с управляющим входо преобразователя частоты 2, блок вычисления ЭДС 16 одним из входов соединен с датчиком тока 3, а дру- гим -входом - с датчиком напряжения 4 ротора. Второй выход 16 блока вычисления ЭДС соединен с входом блок
17 вычисления потокосцепления статора, выход которого подключен к входу блока 18 формирования гармонических сигналов, выходы которого соединены с первой парой коммутируемых входов блока переключения режимов 14, вторая пара коммутируемых входов которого объединена между собой и подключена к выходу источника 19 сигнала нулевой частоты.
В электропривод переменного тока введены блок задержки 20, снабженный пусковым входом, и управляемьй ключ 21, выводы которого подключены к управляющему входу блока переключения режимов 14 и к первому выходу блока вычисления ЭДС 16, при этом управляющий вход управляемого клю- -ча 21 подключен к выходу блока задержки 20.
Используемьй в электроприводе переменного тока преобразователь частоты 2 с непосредственной связью имеет предельную выходную частоту, меньщую частоты напряжения, подаваемого на статор асинхронного двигателя 1 с фазным ротором. Следовательно, преобразователь частоты 2 может подключаться к ротору двигателя только после того, как частота вращения двигателя достигнет значения ((;;,ц,,р - «акс ) где макс предельная выходная частота преобразователя частоты 2.
Для качественного подключения преобразователя частоты 2 к вращающемуся асинхронному двигателю 1 необходимо, чтобы в момент подключения вектор выходного напряжения преобразователя частоты 2 был сориентирован определенным образом относительно вектора ЭДС ротора. В противном случае, при случайной ориентации указанного вектора возможны недопустимо большие броски тока в момент подключения преобразователя.
Электропривод переменного тока работает следующим образом.
Разгоняют электродвигатель 1 с фазным ротором любым из известных . способов до зоны регулирования скорости ротора относительно синхронного значения. По выходным сигналам датчика тока 5 статора и датчика 6 напряжения статора в блоке 13 вычисляют активную Ig и реактивную IP составляющие тока ротора, которые сравниваются с соответствующими
3
заданиями Ig, 1рэ поступающими с выходов блока 8. По полученным на выходах компараторов 9,10 сигналам рассогласования с помощью регуляторов 11,12 пропорционально-интеграль- ного типа формируют сигналы Ig р поступающие на управляющие входы блока прямого преобразования координат 15, на выходе которого формируются сигналы задания фазных токов
1,А,8,с
По выходным сигналам датчика тока 3 ротора и датчика 4 напряжения ротора в блоке вычисления ЭДС 16 формируются сигналы , фазных ЭДС и сигнал (Е) амплитуды ЭДС.
По сигналам фазных ЭДС в блоке 17 вычисляются фазные потокосцепле- ния Vд в с статора, которые используются для формирования гармонических функций sin /it, cos/i t частоты скольжения с помощью формирователя 18.
До перехода к регулируемому режиму работы сигнал Пуск на входе блока задержки 20 отсутствует и управляемый ключ 21 разомкнут.
После перехода к регулируемому режиму работы сигнал Пуск на протяжении времени задержки не про- пускается на управляющий вход ключа 21, которьй остается разо$ кнутым, при этом на вход блока переключения режимов 14 не поступает сигнал (Е) амплитуды ЭДС, что эквивалент- но его нулевому значению. В таком режиме через блок переключения режимов 14 на опорные входы блока прямого преобразования координат 15 поступают постоянные единичные сигналы с выходов источника 19 сигнала нулевой частоты и гармонические сигналы необходимой частоты и фазы формируются регуляторами 11,12. Через время, достаточное для вступления в работу блока 17 вычисления потокосцепления статора и
Редактор Н.Гунько
Составитель А.Жилин Техред Н .Бонкало
1330/59
Тираж 631Подписное
БНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раущская наб., д.4/5
Филиал ПИП Патент, г.Ужгород, ул.Проектная,4
004
соответствующее времени задержки блока 20, ключ 21 замыкается, и работа элкетропривода переходит в нормальный регулируемый режим. При этом если сигнал (Е) меньше уставки, на опорные входы блока прямого преобразования координат 15 продолжают поступать через блок переключения режимов 14 постоянные единичные сигналы с выходов источника 19 сигнала нулевой частоты, а если сигнал (Е) больше уставки, на опорные входы блока 15 начинают поступать вьпсодные гармонические сигналы блока 18.
Таким образом, введение в электропривод переменного тока блока задержки и управляемого ключа позволяет получить с первого же момента подключения преобразователя частоты к ротору такие значения частоты и |фазы выходного напряжения при которых его вектор оказьшается сориентированным определенным образом относительно вектора ЭДС ротора, чем достигается более качественный переходньш процесс и отсутствие бросков тока в сравнении с известным электроприводом.
Формула изобретения
Электропривод переменного тока по авт.св. № 989730, отличающийся тем, что, с целью повышения качества переходных процес- сов за счет исключения бросков тока при переходе от нерегулируемого к регулируемому режиму работы в него введены блок задержки, снабженный пусковым входом, и управляемый ключ, вьшоды которого включены в разрьш связи между управляющим входом блока переключения режимов и первым выходо блока вычисления ЭДС, при этом управющий вход управляемого ключа подключен к выходу блока задержки.
Корректор. А.Тяско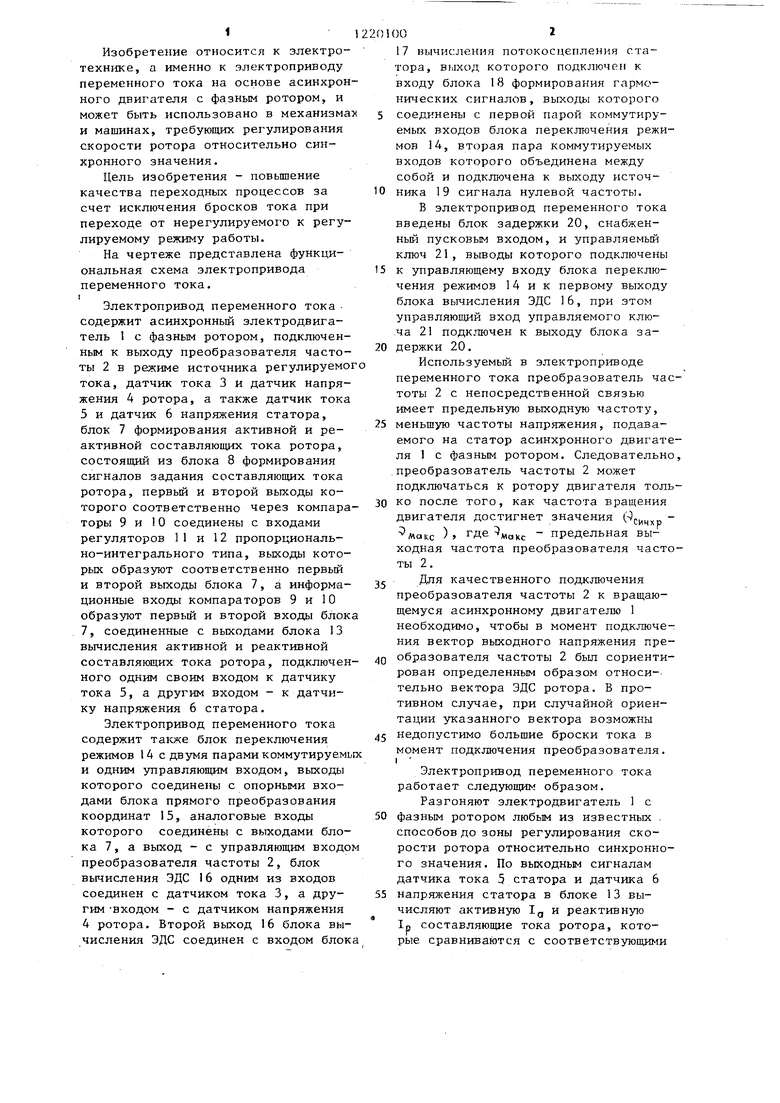

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1984 |
|
SU1185528A1 |
| Электропривод переменного тока | 1985 |
|
SU1359881A1 |
| Электропривод переменного тока | 1986 |
|
SU1378004A1 |
| Электропривод переменного тока | 1984 |
|
SU1272459A1 |
| Электропривод переменного тока (его варианты) | 1984 |
|
SU1249686A1 |
| Электропривод переменного тока | 1986 |
|
SU1345302A1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1372581A1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1677840A2 |
| Электропривод переменного тока | 1984 |
|
SU1251281A1 |
| Электропривод переменного тока | 1987 |
|
SU1439728A2 |
Изобретение относится к электроприводу переменного тока на основе асинхронного двигателя с фазньм ротором. Целью изобретения является повьшение качества переходных процессов за счет исключения бросков тока при переходе от нерегулируемого к регулируемому режиму работы. Электропривод содержит асинхронный .электродвигатель 1 с фазным ротором, преобразователь частоты (ПЧ) 2, датчики тока 3 и напряжения 4 ротора, датчики тока 5 и напряжения 6 статора, блок формирования сигналов 7 активной и реактивной составляющих тока ротора, блок вычисления 13 активной и реактивной составляющих тока ротора, блок переключения режимов 14, блок прямого преобразования координат 15, блок вычисления ЭДС 16, блок 17 вычисления потокосцепления статора и блок формирования гармонических сигналов 1&. Введение блока задержки 20 и управляемого ключа 21 позволяет получить с первого же момента подключения ПЧ к ротору такие значения частоты и фазы выходного напряжения, при которых его вектор оказывается сориенти ованным определенным образом относительно вектора ЭДС ротора, чём обеспечивается отсутствие бросков тока при переходном процессе. 1 ил. (Л INO ГО
| Электропривод переменного тока | 1980 |
|
SU989730A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
