Изобретение относится к рельсовому транспорту и может быть использовано для перемещения объекта по взаимно пересекающимся кольцевому и прямолинейному рельсовым путям, в частности для транспортировки на кольцевой путь и азимутального вращения по нему испытательного стенда с зеркалом радиотелескопа.
Це.1ь изобретения расширение функциональных возможностей путем повышения точности угла поворота платформы.
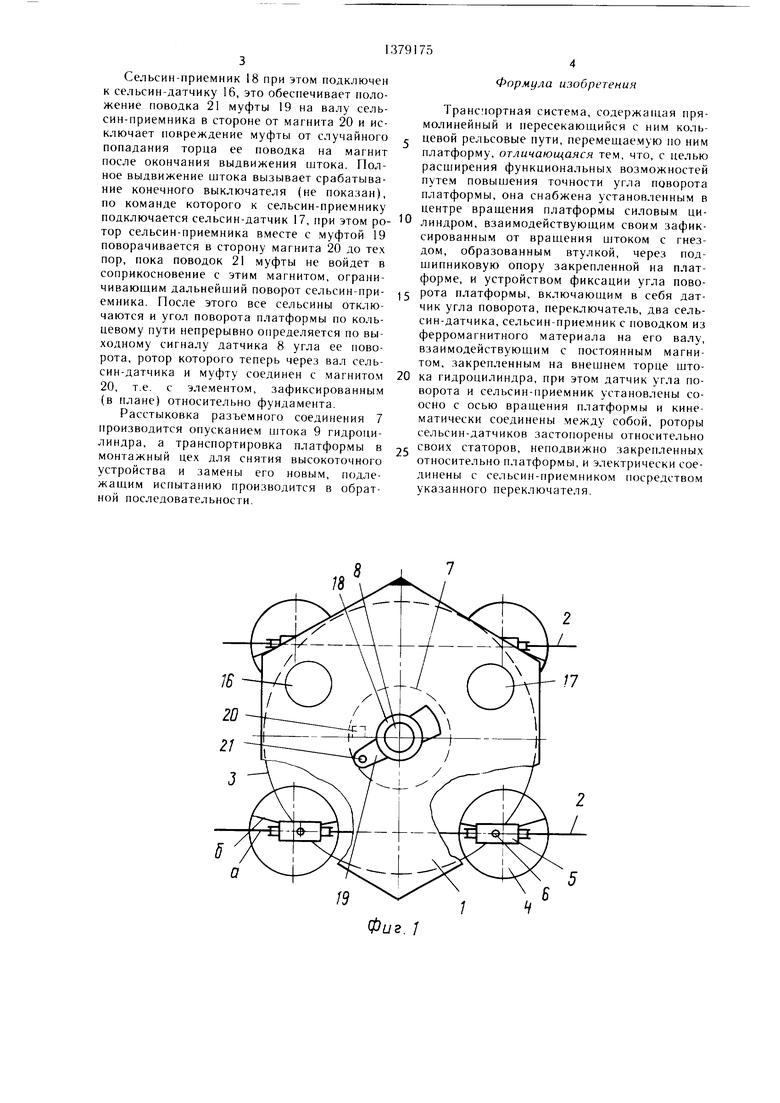
На фиг. 1 схематически изображена транспортная система, вид в плане; на фиг. 2 - разъемное соединение типа штырь-гнездо в состыкованном положении, вертикальный разрез; на фиг. 3 - схема подключе- пия сельсин-датчиков к сельсин-приемнику и соответствующее этому подключению положение ротора последнего с поводковой муфтой на его валу при опущенном П1токе гид- ропилиндра (изображен пунктиром); на (. 4то же, при другом положении
ротора.
Транспортная система перемещения плат- |})С)рмы 1 с высокоточным устройством, на- фимер зеркалом радиотелескопа, для испытания его на кольцевом пути содержит 1рямолинейный 2 и кольцевой 3 рельсовые пути, четыре поворотных круга 4 с отрезками а прямолинейных и криволинейных б рельсов для перевода платформы с одного пути на другой, установленные в зонах пересечения рельсов, четыре двухколесные приводные ходовые тележки 5, несущие платформу I и соединенные с ней шкворневыми узлами 6, приводы поворота тележек (не показаны) вокруг осей шкворневых узлов, домкраты (не показаны) подт.ема платформы, установленные на фундаменте внутри окружности кольцевого пути, и разьемиое соединение 7 типа штырь -1 нездо с расположенным на п.чатформе датчиком 8 yi. ia поворота, причем штырь установлен на фундаменте н центре кольцевого пути, а ответное гнездо на п.г|атформе соосно с ее вертикальной (азимутальной) осью вращения.
Установленный на фундаменте штырь раз ьемного соединения выполнен в виде зафиксированного от вращения вокруг своей оси штока 9 гидроцилиндра И) двойного действия. На дне гидроци.чиндра жестко установлен вертикальный стержень 11 со шпопкой 12, а в 9 выполнено ответное глухое отверстие в для пего со шпоночной канавкой. Выдвинутый в крайнее верхнее положение шток 9 не выходит из шноночного зацепления со стержнем 11, благодаря чему обеспечивается его фиксация от вра1цения.
Ответное для Н1тока гнездо на платформе выполнено в виде втулки 13, поворотно установленной на 1юдп иппиках 14 качения.
0
5
0
5
Для взаимного центрирования втулки 13 и штока 9 при вводе его во втулку в последней образовано заходное коническое расширение.
Для автоматического соединения датчика 8 угла поворота платформы со штоком 9 на фундаменте и определения величины поворота платформы относительно постоянно заданного направления транспортная система снабжена автоматическим переключателем 15, установленными на платформе двумя сельсин-датчиками 16 и 17,сельсин-приемником 18 с поводковой муфтой 19 на его валу и постоянным магнитом 20, закрепленным на периферийной части штока гидроцилиндра, а расстояние от оси щтока до полюса магнита 20 равно расстоянию от вертикальной оси вращения платформы до оси поводка 21 муфты, причем поводок этот выполнен из ферромагнитного материала, сель- син-нриемник установлен соосно с осью вращения платформы, роторы сельсин-приемника и датчика угла поворота кинематически соединены друг с другом, а роторы сельсин-датчиков застопорены относительно своих статоров, неподвижно закрепленных относительно платформы, при этом переключатель 15 может соединять одновременно только один из сельсин-датчиков с сельсин- приемником, что соответствует одному из двух заданных ноложений его ротора, а сила притяжения поводка муфты 19 магнитом 20 больше приложенного к этому поводку усилия, необходимого для поворота кинематически соединенных между собой роторов сельсин-приемника и датчика угла поворота платформы.
После установки в монтажном цехе вы- 5 сокоточного устройства (зеркала радиотелескопа) на платформу 1 она транспортируется посредством своих приводных ходовых тележек 5 по прямолинейному пути 2 на кольцевой путь 3 для испытания. Для приема платформы на кольцевой путь поворотные круги 4 устанавливают так, чтобы расположенные на них отрезки а прямолинейных рельсов были состыкованы с рельсами прямолинейного пути 2. Когда тележки 5 окажутся на поворотных кругах 4, платформу останавливают и поднимают домкратами (не показаны) так, чтобы колеса тележек оказались выше уровня рабочей поверхности рельсов. Затем поворотные круги 4 устанавливают так, чтобыб отрезки б криволинейных рельсов на них состыковались с кольцевым путем 3, образовав замкнутую окружность, после чего ходовые тележки 5 разворачивают вокруг шкворневых узлов 6 в положение, обеспечивающее их посадку на кольцевой путь после опускания платформы домкратами, поставленную на кольцевой путь платформу начинают перемещать по нему приводными тележками, одновременно вводя шток 9 гидроцилиндра 10 во втулку 13 на платформе.
0
0
5
0
5
Сельсин-приемник 18 при этом подключен к сельсин-датчику 16, это обеспечивает положение поводка 21 муфты 19 на валу сельсин-приемника в стороне от магнита 20 и исключает повреждение муфты от случайного , попадания торца ее поводка на магнит после окончания выдвижения штока. Полное выдвижение штока вызывает срабатывание конечного выключателя (не показан), по команде которого к сельсин-приемнику
Формула изобретения
Транспортная система, содержапАзя прямолинейный и пересекаюш,ийся с ним кольцевой рельсовые пути, перемещаемую по ним платформу, отличающаяся тем, что, с целью расширения функциональных возможностей путем повышения точности угла поворота платформы, она снабжена установленным в центре вращения платформы силовым циподключается сельсин-датчик 17, при этом ро- Ю линдром, взаимодействующим своим зафик- тор сельсин-приемника вместе с муфтой 19сированным от вращения штоком с гнезповорачивается в сторону магнита 20 до техдом, образованным втулкой, через подпор, пока поводок 21 муфты не войдет вшипниковую опору закрепленной на платсоприкосновение с этим магнитом, ограни-форме, и устройством фиксации угла повочивающим дальнейший поворот сельсин-при- рота платформы, включаюшим в себя дат- емника. После этого все сельсины отклю-чик угла поворота, переключатель, два сельчаются и угол поворота платформы по коль-син-датчика, сельсин-приемник с поводком из
цевому пути непрерывно определяется по вы-ферромагнитного материала на его валу,
ходному сигналу датчика 8 угла ее пово-взаимодействующим с постоянным магнирота, ротор которого теперь через вал сель-том, закрепленным на внешнем торце штосин-датчика и муфту соединен с магнитом 20 ка гидроцилиндра, при этом датчик угла по- 20, т.е. с элементом, зафиксированнымворота и сельсин-приемник установлены со(в плане) относительно фундамента.осно с осью вращения платформы и кинеРасстыковка разъемного соединения 7матически соединены между собой, роторы
производится опусканием штока 9 гидроци-сельсин-датчиков застопорены относительно
линдра, а транспортировка платформы в 25 своих статоров, неподвижно закрепленных монтажный цех для снятия высокоточногоотносительно платформы, и электрически соеустройства и замены его новым, подле-динены с сельсин-приемником посредством
жащим испытанию производится в обрат-указанного переключателя,
ной последовательности.
Формула изобретения
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортная система с взаимно пересекающимися рельсовыми путями | 1986 |
|
SU1351824A1 |
| РАМА БЕСЧЕЛЮСТНОЙ ТЕЛЕЖКИ ТЕПЛОВОЗА | 2013 |
|
RU2536300C2 |
| Зажимное устройство | 1981 |
|
SU1009630A1 |
| Устройство для автоматического управления электроприводом лебедки стрелы роторного экскаватора | 1960 |
|
SU133998A1 |
| Путевая машина | 1971 |
|
SU667622A1 |
| Устройство для автоматической укладки кирпичных и других подобных блоков | 1951 |
|
SU104374A1 |
| Поводковая муфта | 1984 |
|
SU1183743A1 |
| Вибропогружатель с регулируемым статическим моментом | 1991 |
|
SU1828479A3 |
| Анемометр сигнальный | 1975 |
|
SU558215A2 |
| Установка для прошивки бортов матраца | 1978 |
|
SU973680A1 |

Изобретение относится к устройствам для перемещения объекта по взаимно пересекающимся кольцевому и прямолинейному рельсовым путям, в частности для транспортировки на кольцевой путь и азимутального вращения по нему испытательного стенда с зеркалом радиотелескопа. Цель изобретения - повышение точности угла поворота платформы. Установленный на фундаменте штырь разъемного соединения выполнен в виде щтока 9 гидроцилиндра 10 и зафиксирован от вращения вокруг своей оси. Вертикальный стержень 11 со шпонкой 12 жестко закреплен на дне гидроцилиндра. Ответное для штока гнездо на платформе выполнено в виде втулки 13 и установлено на подщипниках 14 качения. Для автоматического соединения датчика 8 yiла поворота платформы со П1ТОКОМ 9 на фундаменте установлены автоматический переключатель и два сельсин-датчика. Расстояние от оси штока до полюса .магнита 20 равно расстоянию от вертикальной оси вращения платформы до оси поводка 21. Сила притяжения поводка муфты магнитом 20 больще приложенного к этому поводку усилия. Полное выдвижение штока вызывает срабатывание конечного выключателя. 4 ил. оо со ел
Фиг. /
| Транспортная система с взаимопересекающимися рельсовыми путями | 1983 |
|
SU1216063A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
