Устройства для автоматической укладки кирпичных и тому подобных блоков известны в многообразных модификациях.
Сочетание известных систем автоматизации производственных процессов при помощи магнитной записи с аппаратурой телеуправления, в частности - аппаратурой дальней связи, также может быть применено в устройствах для производства крупных строительных блоков, например простенков из кирпичей или из других строительных блоков, на заводах строительных материа.тав или на строительных площадках.
Описываемое устройство для автоматической укладки подобных блоков из кирпичей и стройдеталей имеет ту особенность, что совместно применены: механизм для перемещения укладываемого блока по мере его возведения, подвижной захват д.ш кирпичных и других блоков, сопло для нанесения раствора, сервомоторы для приведения перечисленных узлов в действие, л11 станционно действуюплие следящие системы с се.тьсинами (или фазорегуляторами, потенциометрами и тому подобными аппаратами дистанционной передачи движения) для управления указаьщыми сервомоторами п аппаратура магнмтпой записи. Аппаратура магнитной записи испол}ззуется для записи программы операций с органов дистанционной передачи движения при однажды выполненном неавтоматически рабочем цикле и для многократного автоматического воспроизведения рабочего цикла путем снятия этой программы с магнитной записи п использования для управления следящими системами.
Особенностью описываемого устройства является также применение аппаратуры многоканальной дальней связи д.чя многочастотно .магнитной записи с целью увеличения точности воспроизведения рабочего цикла и достижения компактности записи движений многочисленных рабочих органов, а также дискретных команд от кнопок управления.
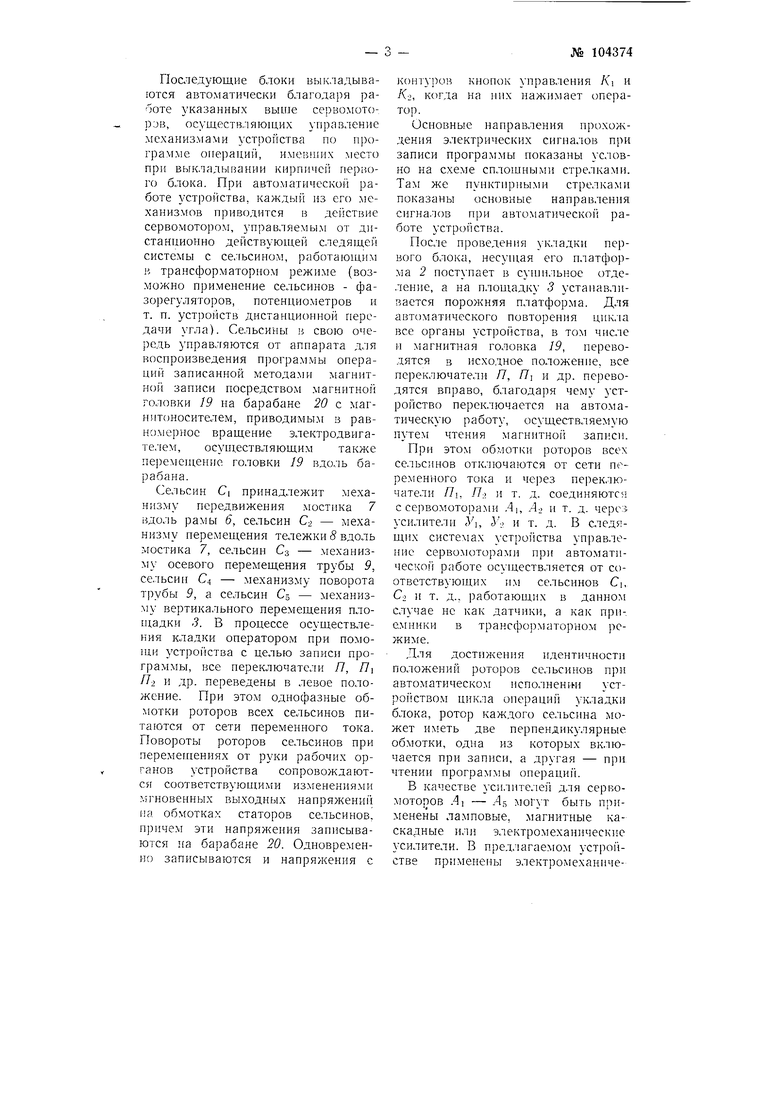
На фиг. 1 изображено описываемое устройство, на фиг. 2 - скелетная схема системы электрического управления этим устройством.
Блок / из кирпича, например простенок, последовательно выкладываемый горизонтальными рядами кирпичей, располагаемых и каждом ряду с необходимой перевязкой, поддерживается платформой 2, колеса которой устапов.тены на рельсах п.чогцадки 5. Площадка 3 выполнена подъемно - опускной, д.чя чего она соединена с подъемником 4, снабженным четырьмя бесконечными цепями, совместно перемещающимися при сообщении вращения ведуще звездочке 5 одной из цепей подъемника. После укладки каждого ряда кирпичей блока /, плон1адка 3 опускается при нажатии пусковой кнопки на расстояние, соответствующее толщине кирпича, вследствие чего выкладывание кирпичей происходит все время на одном уровне. После окончания укладки блока платформа 2 откатывается по рельсовому пути в сущильное отделение, а на рельсы плои1,адки 3 вкатывается, например посредством пшгового толкате.пя, порожняя платформа для укладки на нее кирпичей с.ле;1,ующего блока.
Над платформой 2 на четырех вертикальных стойках неподвижно установлена горизонта.тьная рама 6, под,держивающая своими продольными щвеллерами ролики передвижного мостика 7. вдоль которого, т. е. поперек д.типы )амы 6, может перемещаться тележка 8. несущая 5ертикальную трубу 9 с резиновой втулкой 10 на ней, служащей в качестве рукоятки при перемещении и пово)ачивании трубы .9 вручную при неавтоматичеосом выкладывании первого блока, осуществляемом с целью записи программы цикла.
К трубе 9 прикреплена эластичпая труба 11; несущая на нижнем конце пневматический захват 12 для кирпичей, представляюпдий собой воронку с резиновым буртом, накладываемым на кирпич. Верхний конец трубы 11 соединен с насосом, обеспечивающим существование в трубе ПОСТ05П1НОГО разрежения. На рукоятке вту.тки 10 установлеиа кнопка К управления э.псктромагпитом Р| клапана 13, при нажат1П1 KOTOpoii кирпич п)исасывается к захвату 12 и при помощи тележки 8 и мостика 7 может быть снят с транспортера 14, подающего кирпичи щаговым движением, и перенесен в .;побое место укладки в блок.
Верхний конец трубы 9 при помощи щланга 15 сообщается с бункером 16, установ.тенным на раме 6, осуществ.ляющим нодачу в трубу 9 раство)а под давлепием. Нижний конец трубы 9 имеет форму сопла 17 с прямоугольным отверстием и с.тужит для нанесения раствора на горизонтальные и вертикальные грани кирпича. Труба 9 над сонлом 17 может перекрываться заслонкой 18. соединенной с якорем электромагнита Р2, включаемого кнопкой К, установленно на втулке 10.
Для передачи движения от трубы к аппаратуре для записи про1раммы и для осуществления всех движений при их автоматическом воспроизведении по записанной про1-рамме служат сельсины Ci, С-, и т. д.. снабженные редукторами сервомоторы AI, А.У и т. д., с их И1естернями пли червячными передачами Mi, И-2 и т. д. Так, для осуп;ествления движения мостика 7 при горизонтальном перемещении трубы 9 служат сельсин С, сервомото) Л| и коническая пара//i; для осуи ествления осевого вертикального перемещения трубы 9 предназначены сельсин Сз, сервомотор /1з, игестерня Из; для поворачивания трубы 9 ее оси - сельсин Сд, cejiBOMOTOp Л.1 и и естерня MI.
Первый блок из кирпичей выкладывается при управлении рабочими органами устройства от руки оператора -- опытного каменщика, который водит трубу 9 посредством рукоятки втулки 10 и, нажимая в пужный момент на кнопки Ki и К-, захватывает и переносит кирпичи с транспортера в блок, а также наносит раствор по постели кирпичей и на их боковые грани.
Последующие блоки выкладываются автоматически благодаря работе указанных выше сервомоторов, осуш,еств.:1яюи;их уп)лвление механизмами устройства по п)ограмме операций, имевших место при выкладывании ки)пмчей первого блока. При автоматической работе устройства, каждый из его механизмов приводится в действие сервомотором, управляемым от дистанционно действующей следящей системы с сельсином, работающим в трансформаторном режиме (возможно применение сельсинов - фазорегуляторов, потенциометров и т. п. устройств дистанционной передачи угла). Сельсины в свою очередь управляются от аппарата для воспроизведения программы операций записанной методами магнитной записи посредством .магнитной головки 19 на барабане 20 с магнитоносителем, приводимьпг в равномерное вращение электродвигате.тем, осуп1,ествляющим также перемещение головки 19 вдоль барабана.
Сельсин С| принадлежит ме.ханиз.му перед:вижения .мостика 7 вдоль рамы 6, сельсин С- - ме.ханиз.му перемещения тележки 8 вдоль мостика 7, сельсин Сз - механизму осевого перемещения трубы 9, сельсин С4 - механизму поворота трубы 9, а сельсин С, - механизму вертикального перемещения плоП1,адки 3. В процессе осуществления кладки операторо.м при помо ци устройства с целью записи программы, все переключатели Л, П Й2 и др. переведены в левое положение. При этом однофазные обмотки роторов всех сельсинов питаются от сети переменного тока. Повороты роторов сельсинов при перемещениях от руки рабочих органов устройства сопровождаются соответствуюпшми из.менения.ми мгновенных выходных напряжений на обмотках статоров сельсинов, причем эти напряжения записываются на барабане 20. Одновременно записываются и напряжения с
контуров кнопок управления Ki и К2, когда на иих нажимает оператор.
Основные направления прохождения электрических сигналов при записи программы показаны условно на схеме сплощными стрелками. Там же пунктирными стрелками показаны основные направления сигналов при автоматической работе устройства.
После проведения у1 ладки первого блока, несуп1,ая его платформа 2 поступает в су ппльное отде.чение, а на площадку 3 устанавливается порожняя платформа. Для автоматического повторения цик.та все органы устройства, в том числе и магнитная головка 19, переводятся в исхо.вдое положенпе, все переключатели П, Я и др. переводятся вправо, благодаря чему устройство переключается на автоматическую работу, осуществляемую путем чтения магнитной записи.
При этом обмотки роторов всех сельсинов отк.почаются от сети переменного тока и через переключате.ли /7i, П и т. д. соединяются с сервомоторами AI, А- и т. д. через усилители У|, У- и т. д. В следящих системах устройства управление сервомоторами при автоматической работе осупл.ествляется от соответствующих и.м сельсинов Ci, Со и т. д.. работаюптих в данном случае не как датчики, а как приемники в трансформаторном режиме.
Для достижения идентичности положений роторов сельсинов при автоматическом исполнении устройством цикла операций укладки блока, ротор каждого сельсина может иметь две перпендикулярные обмотки, одна из которых включается при записи, а другая - при чтении программы операций.
В качестве уси.тите.лей д.тя сервоMOTODOB AI - /Is могут быть применены ла.мповые, магнитные каскадные или электромеханические усилители. В пред.тагаемом ycTpoiiстве применены электромеханические усилн гели, включенные по схеме электромеханического уснления мощности и смонти)ованиые каждый в общих корпусах вместе с электродвигателем переменного тока, сервомотором постоянно1о тока и возбудителем. В устройстве должны быть предусмотрены уснокоите;1ьные (|)ирую1цие контуры и связи, опнсаиие которых не приводится, так ка1-; подобного рода сервомоторы с э.чектромеханическими . имеют Н1ирокое практическое применение.
По мере чтения магнитной записи, напряжения с магнитной головки поступают через усилители не к сельсинам Ci - Cs, но и в контуры управления электромагнитами кнопок К. и К-, клапана нневматичес1чого захвата кирпнчей 13 и зас.юнки 18 трубы 9 подачи раствора. 13 результате чего полный цик,1 ук.чадки б.чока повторяется автоматически в том же порядке, в котором он был произведен онераторо.м в )оцессе неавтоматической кладки первого блока.
Второй особенностью пред,:1агаемого ycTpoiiCTBa является прнмепение для одновременной записи большого количества мгновенных напряжений, сннмаемь Х с pasrn ix электрических контуров (по три на каждый из се.чьснпов и по одному на каждую из кнопок), всего одной дорожки магнитной записи. Все напряжения записываются на барабане 20 (или магнитной ленте) одной магнитной головкой 19 б.чагодаря использованию известной аппаратуры многоканального тона.чьного телеграфировання.
Для указанной це.ти помимо тока одной частоты для питания рото1)ов всех сельсинов в процессе записи применены несуихие колебания разных более высоких звуковых частот, получаемые от посторонних источников (машинных или ламновых генераторов). Эти иесунше частоты модулируются напряженнями, снимаемыми с обмоток статоров сельсинов и с контуров кнопок.
Мгновенные н.анряжения в трехфазных обмотках статоров сельсинов имеют обшую частоту, равную частоте тока, питающего роторы сельсииов. но в каждой обмотке имеют спою амп;п1туду. зависящую от угла поворота ротора сельсина. За об-, моткой статора каждого из сельсинов, равно как и за контуром каждой кнопки, закреплена одна из несущих частот 1енерируе.мых в генераторах Г, Г-, н т. д. Модулирова Hie несущих колебаиий иапряжегн-1ями. сиимаемы.ми нри записи с обмоток статоров сельсинов и с контуров кнопок, осуществляется в модулято)эах Aii, ;Vb и т. д., от которых мод лированные напряжения через фильтры Ф. Ф и т. д. и переключатель П направляются к магнитной головке 19 для записи иа магиитоносителе барабаиа 20 на одной дорожке.
При чтении магиитной записи напряжения, снимаемые с магнитной головки 19, уси.:1иваются в усилителе аппарата магнитной записи, раск; адываются но ,тинейны.м частота.м при по.мощи линейны.х (|)ильтров Фь Фа и т. д. и раздельно направ.пяются к демодуляторным устройствам Д, Д-i и т. д., выделяющим напряжения низкой частоты из токов несущих частот и нанрав.аяющим отфильтрованные нанряжения низкой частоты в соответствующие обмотки статоров се.чьсинов н.ш в контуры кнопок.
Применение в устройстве aimaратуры многокана.пьного тонального те,:1егра()ирования для записи одной головки на одной магнитно дорожке предотвращает появление смен1еиий (сбивание) между воспроизводимыми перемеиными напряжениями, снятыми с трех об.моток статора каждого сельсина, воз.можных при ведении заинси и восироизведении этих напряжений отдельными магиитны.ми головками на разных дорожках, а также обеспечивает неискаженное воспроизведение меняюпщхся соотношеннй между этими иапряжениями и правильность воспроизведения определяемых этими соотношениями (а ие абсолютными величинами иаирял ений) углов поворота роторов сельсинов.
Вместе с тем запись одной головкой дает возможность применить малогабаритные бланки для записи сложных рабочих циклов, упростить записывающую и воспроизводящую аппаратуры и обесиечить полную синхронность движений органов устройства в его работе. Применение несущих частот позволяет использовать как системы следящего привода с сельсинами - трансформаторами, так и системы с фазорегуляторами и.ти с круговыми потенциометрами, работающие на постоянном токе.
Бланк записи может быть сохранен для более поздних повторений цикла или может быть испо,тьзован д.тя записи нового . Количество автоматических повторени цикла и ко.тичество циклов, которые могут быть записаны поочередно на одном и том же бланке, практически можно считать неограниченными.
П р е д .м е т и з о б ) е т е н и я 1. УстроГгство для автоматиче:ской укладки кирпичных и других
подобных блоков, о т.л и ч а ю щ е ес я тем. что. с целью повыщения его производительности, совместно п)именены: механизм для перемещения ук,тадываемого блока по мере его возведения, захват для укладьгваемых кирпичеГ или других б.юков. сопло для нанесения раствора, сервомоторы для прщзедения перечисленных уз.тов в действие, дистанционно действующие с.тедящие системы с сельс П1ами и.чи потенциометрами для управления указанными сервомоторами и аппарат д.тя воспроизведения прог 1аммы операций. записанной методами магнитно записи, служащей д.тя управления следянгими системами.
2.Устройство по п. 1. отличающееся ири.менением аппаратуры многокана.шного тонального телеграфнрования для записи программы операцпй ряда испо.тните.тьных органов и напряжений управления па одно%г магнитоноситс.те при помощи одной запнсываюпхеГ головки и для нослед}ющего воспроизведения записанных онерации всеми исполнительными органами.
3.Устройство по п. 1, о т л и ч аю щ е е с я тем, что сопло для нанесения раствора и захват для кирпича объединены на общей рукоятке.




Lf
V
ZEj-CSD-И
